LES DIFFÉRENTS SYSTÈMES DE L'ÉTAGE DE DESCENTE
![]()
L'ensemble ou une partie des sous-systèmes suivants sont contenus dans l'étage de descente :
- système de contrôle du guidage et de la navigation (GN & C) : le radar d'atterrissage.
- sonde de détection de surface.
- propulsion principale (moteur de descente) : voir page dédiée.
- système du contrôle de l'environnement.
- dispositifs électro-explosifs.
- source de puissance électrique.
- communications.
LE RADAR D'ATTERRISSAGE
Le radar d'atterrissage du LM est une version avancée du radar altimètre et du capteur de vitesse Doppler (Radar Altimeter and Doppler Velocity Sensor ou RADVS) utilisés dans le cadre du programme Surveyor. Il utilise les mêmes principes et techniques éprouvés que la Ryan Aeronautical Compagny utilise depuis plus de 15 ans (à l'époque) dans sa famille évolutive de navigateurs et d'altimètres Doppler.
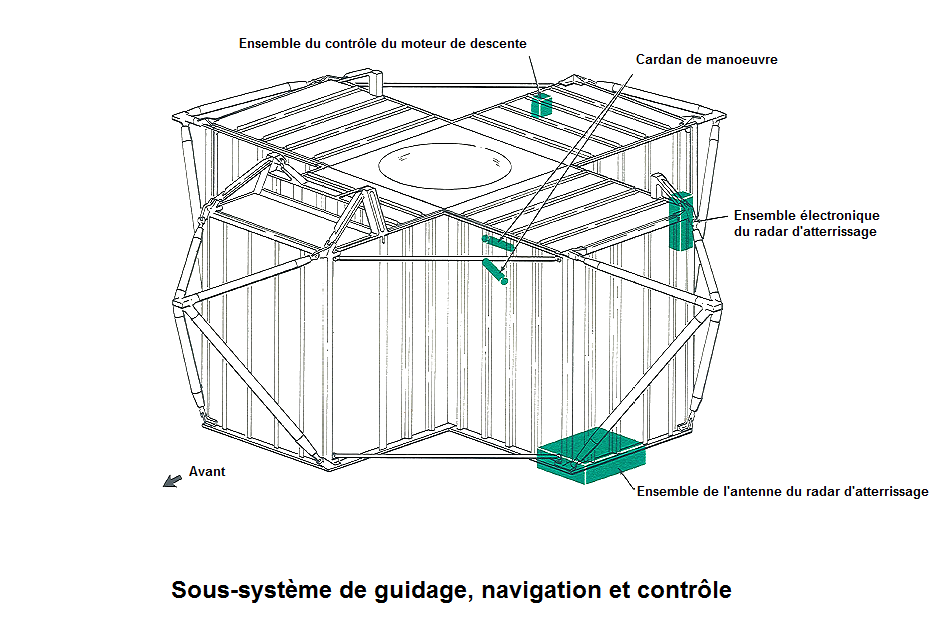
Le radar d'atterrissage (Landing Radar ou LR) fournit au PGNS et aux astronautes des données sur la distance oblique et la vitesse pour le contrôle de la descente vers la surface lunaire. Sur la base de ces données, le PGNS calcule les signaux de commande pour le taux de descente du LM, le vol stationnaire à basse altitude et l'atterrissage en douceur sur le site lunaire sélectionné. Les composants du LR sont situés au bas (l'antenne émettrice réceptrice) et à l'intérieur (son système électronique) de l'étage de descente, ils se présentent sous la forme de deux ensembles interchangeables.
 |
 |
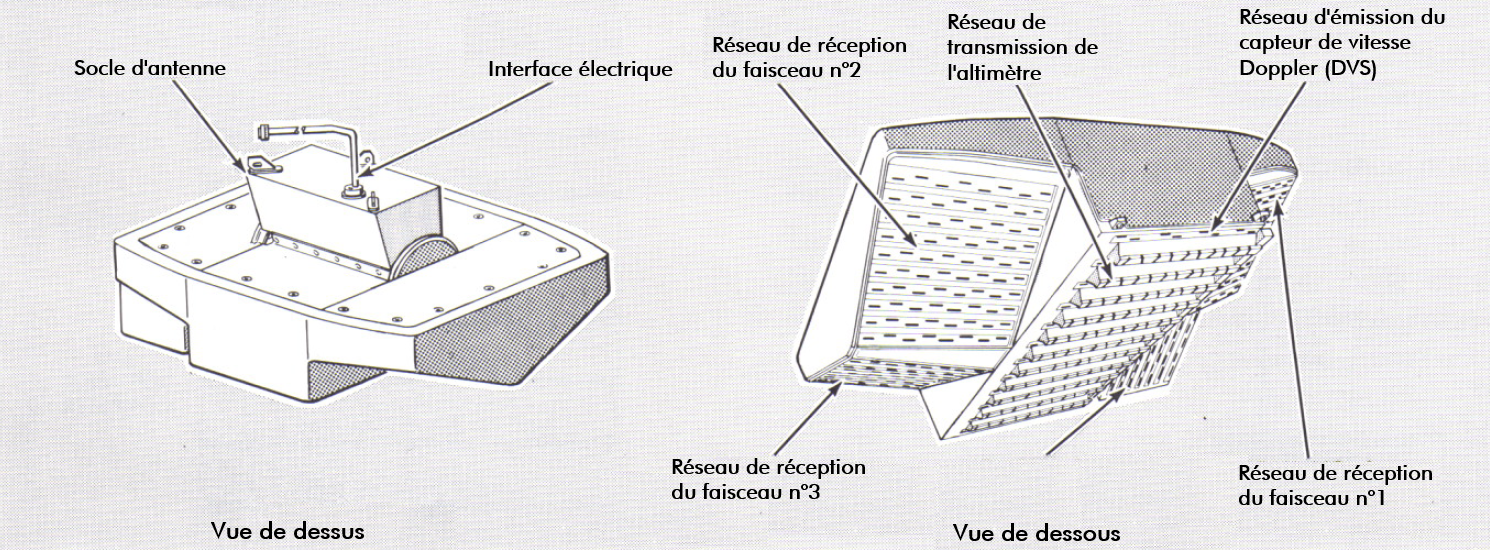
L'antenne (Antenna Assembly ou AA) forme, dirige, transmet et receptionne quatre faisceaux étroits de micro-ondes. Elle se compose de six réseaux de phase : deux pour l'émission et quatre pour la réception. Les réseaux d'émission du capteur de vitesse et de l'altimètre sont mécaniquement entrelacés dans une ouverture commune. Les angles des faisceaux sont fixés dans le système de coordonnées de l'antenne. L'AA transmet des faisceaux de vitesse à une fréquence de 10,51 gHz et un faisceau altimétrique de 9,58 gHz à la surface lunaire.
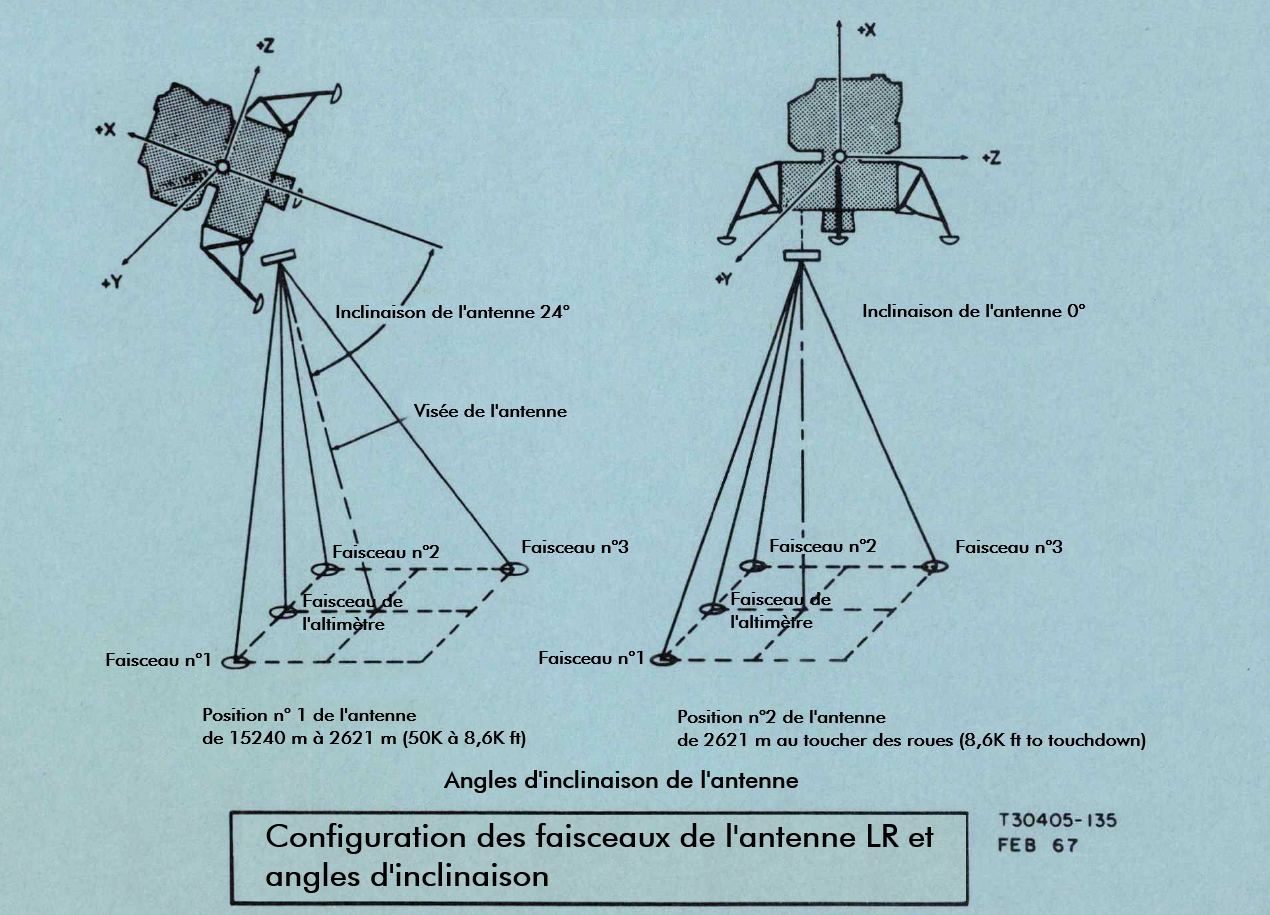
Pour remplir cette fonction, l'AA est composé de deux réseaux de phase entrelacés pour la transmission et de quatre réseaux de phase duplexés dans l'espace pour la réception. Les réseaux de transmission forment une plate-forme sur laquelle sont montés quatre mélangeurs micro-ondes, quatre préamplificateurs à double fréquence audio, deux émetteurs micro-ondes à semi-conducteurs et un modulateur FM. Elle est fixée sur un socle qui possède un mécanisme d'inclinaison. L'AA a une position de descente et une position de vol stationnaire. En position de descente, l'angle de visée de l'antenne est de 24° par rapport à l'axe X du LM. En position de vol stationnaire, l'angle de visée de l'antenne est parallèle à l'axe X et perpendiculaire à l'axe Z. Le positionnement de l'antenne est effectué par un actionneur d'inclinaison (moteur à courant continu réversible). La position de l'antenne est sélectionnée par l'astronaute en mode manuel en plaçant le commutateur LDG ANT 17S5 sur le panneau de commande III à la position souhaitée et par l'ordinateur de guidage du LM en mode automatique si 17S5 est placé en position Auto. En fonctionnement automatique, l'ordinateur de guidage du LM commande l'antenne en position de vol stationnaire à une hauteur de 2438 à 2743 m (8 000 à 9 000 ft) au-dessus de la surface lunaire.
Pour réduire au maximum la masse du radar d'atterrissage, le magnésium a été largement utilisé. Par exemple : les réseaux de phase de l'antenne sont en magnésium. Ils sont fixés dans une coque en fibre de verre en nid d'abeille, elle-même recouverte d'une fine feuille d'aluminium. Les mélangeurs sont aussi en magnésium. Ce choix de conception permet de réduire considérablement la masse totale et d'améliorer le rapport résistance/masse.
L'ensemble (ou boitier) électronique (Electronic Assembly ou EA) traite les retours Doppler et FM à ondes continues, qui fournissent les données de vitesse et de distance oblique à l'ordinateur de guidage LM et aux indicateurs du tableau de bord. Ses composants électroniques sont densément emballés dans un boîtier en magnésium pulvérisé d'époxy noir. Il s'interface avec le sous-système de guidage, de navigation et de contrôle (GN&CS), le sous-système d'instrumentation (IS pour Instrumentation Subsystem) et le sous-système d'alimentation électrique (EPS pour Electrical Power Subsystem). Il comprend : des traceurs de fréquence (un pour chaque faisceau de vitesse), un traceur de fréquence de portée, un convertisseur de vitesse et un calculateur, un calculateur de portée, un convertisseur de données de signal et un circuit logique d'état des données et d'absence d'état. L'ensemble électronique est monté à l'intérieur de l'étage de descente et, en tant que tel, est exposé à un environnement thermique moins sévère que l'antenne.
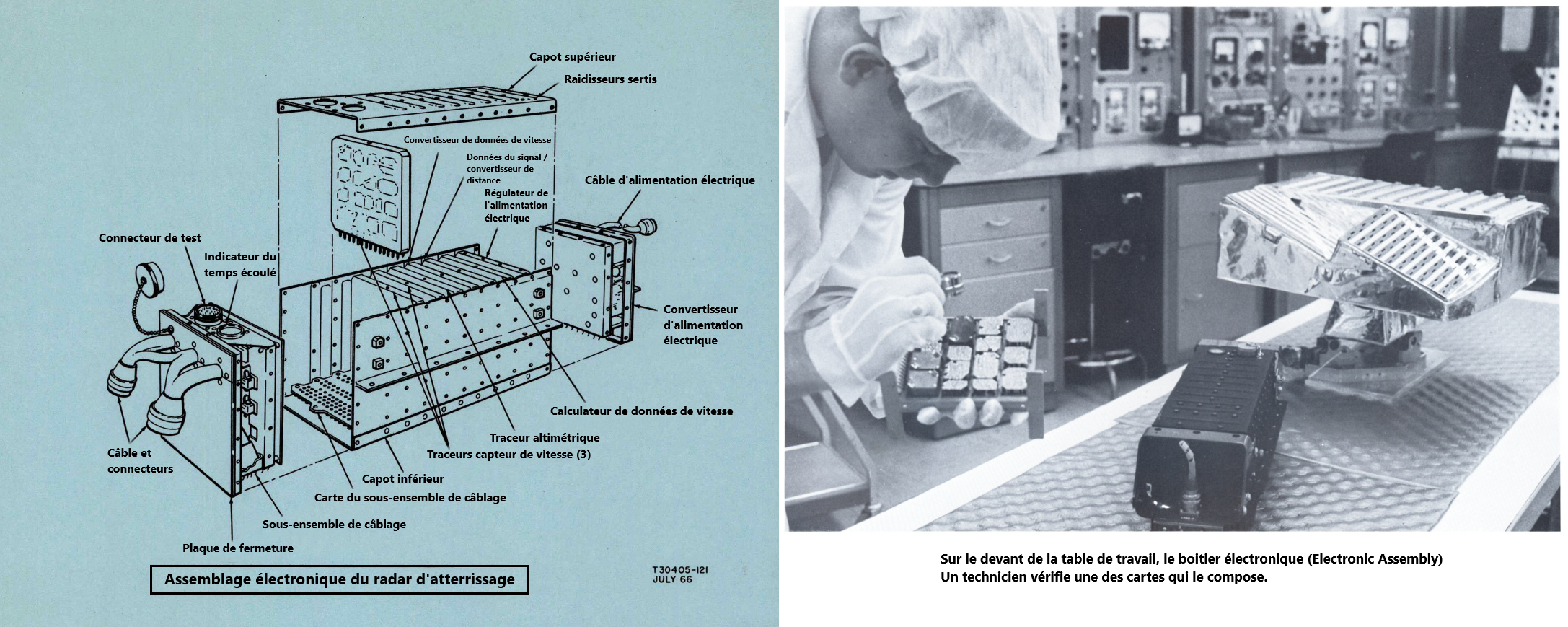 Vue éclatée et d'ensemble du boitier électronique du radar d'atterrissage, photo copyright Ryan Company |
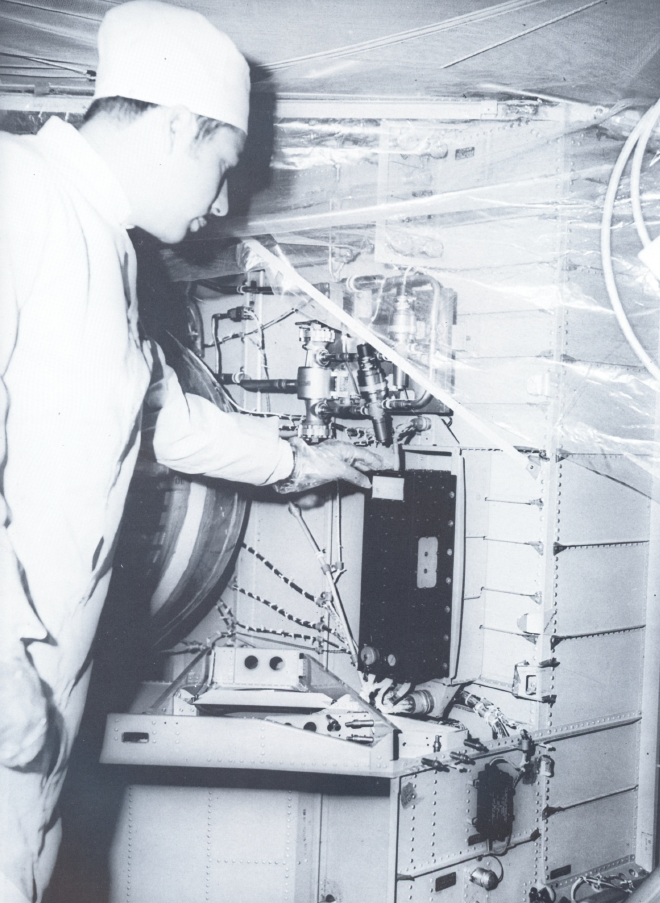 Ce même boitier à son emplacement dans l'étage de descente du LM (Ryan Company) |
L'alimentation électrique du radar d'atterrissage est située dans l'ensemble électronique. L'alimentation fournit des tensions régulées de +25, -25, +4 et -2 volts avec une régulation de 1% et une faible ondulation sur une plage de tension d'entrée de 25 à 31,5 vdc.
Le saviez-vous ?? Aucun refroidissement auxiliaire ou dissipateur de chaleur n'est fourni à l'une ou l'autre des unités. Pendant les manœuvres de descente et de freinage, l'antenne est exposée au rayonnement de la surface lunaire, mais également au rayonnement de la jupe du moteur et du panache d'échappement. La conception du radar d'atterrissage permet de maintenir la température de toutes les pièces (résistances, transistors, etc.) dans une plage spécifique comprise entre -17,7 ° et 85°C (0°F et +185°F) pendant toute la durée de la mission. En effet, la conception thermique tient compte de la pire combinaison possible de conditions de vol. Une attention particulière a été portée aux finitions des surfaces externes et internes de l'antenne. Des finitions thermiques et des revêtements protecteurs sont appliqués à l'antenne pour contrôler la température pendant toutes les phases de la mission Apollo. L'aluminium déposé sous vide est utilisé en conjonction avec des motifs de peinture thermique sélectionnés afin d'obtenir un rapport optimal entre l'absorption et l'émission d'énergie thermique. Cela permet de maintenir les pièces de l'antenne en dessous de la température maximale autorisée dans le pire des cas d'exposition à des températures élevées (exposition totale au soleil et au rayonnement pendant toute la durée de la mission). Les températures extrêmes ne sont cependant pas compensées de manière adéquate par ces moyens lorsque le radar ne fonctionne pas. Pour fournir la protection supplémentaire nécessaire pendant les périodes de non fonctionnement, un dispositif de chauffage se composant de tiges calorifiques a été intégré dans la partie électronique de l'antenne pour empêcher la température de tomber en dessous du minimum autorisé en cas d'exposition totale du vol à l'espace lointain plutôt qu'au rayonnement solaire. Les éléments chauffants contrôlent la température de non fonctionnement de l'antenne entre -17,7° et -6,6°C (0° et +20°F), et représentent, avec les circuits de commande, une consommation maximale de 65 watts. L'alimentation du vaisseau spatial à +28 vdc est fournie aux circuits de commande et aux éléments chauffants par l'intermédiaire des contacts d'un relais situé dans le sous-ensemble de câblage. Ce relais alimente et désactive les éléments chauffants chaque fois que la puissance est appliquée à l'alimentation en courant continu basse tension du LR. Le circuit de commande des éléments chauffants utilise une redondance quadruple dans les pilotes de commutation et les thermistances pour assurer la fiabilité. Ces circuits de commande de commutateur activent l'amplificateur de puissance (qui agit comme un commutateur +28 vdc) lorsque la température interne de l'antenne atteint -17,7°C (0°F), et désactivent l'amplificateur de puissance (ouvrent le commutateur) lorsque la température de l'antenne atteint -6,6°C (+20°F).

Comment le LR fonctionne-t- il ?
Le LR détecte la vitesse et la distance oblique du LM par rapport à la surface lunaire au moyen d'un capteur de vitesse Doppler à trois faisceaux et d'un altimètre radar à un seul faisceau. Les vitesses coordonnées sont calculées à partir du décalage Doppler mesuré le long des trois faisceaux d'énergie micro-ondes, tout comme le décalage Doppler du faisceau de l'altimètre radar. L'altimètre radar est corrigé par effet Doppler et la distance oblique de sortie est utilisée par le LGC pour dériver l'altitude de LM par rapport à la surface lunaire. La distance oblique est calculée à partir de la différence d'écart de fréquence entre les signaux émis et reçus par l'altimètre, résultant de la modulation de fréquence du signal émis et du délai entre les signaux émis et reçus. Les données de vitesse et de distance sont transmises au LGC sous forme de mots binaires de 15 bits ; les données de vitesse nominales avant et latérales sont transmises aux indicateurs du LM sous forme de tensions analogiques d-e ; et les données de distance oblique et de vitesse verticale (taux de distance) sont transmises aux écrans du LM sous forme de fréquences de répétition d'impulsions (PRF ou Pulse-Repetition Frequencies).
 |
 |
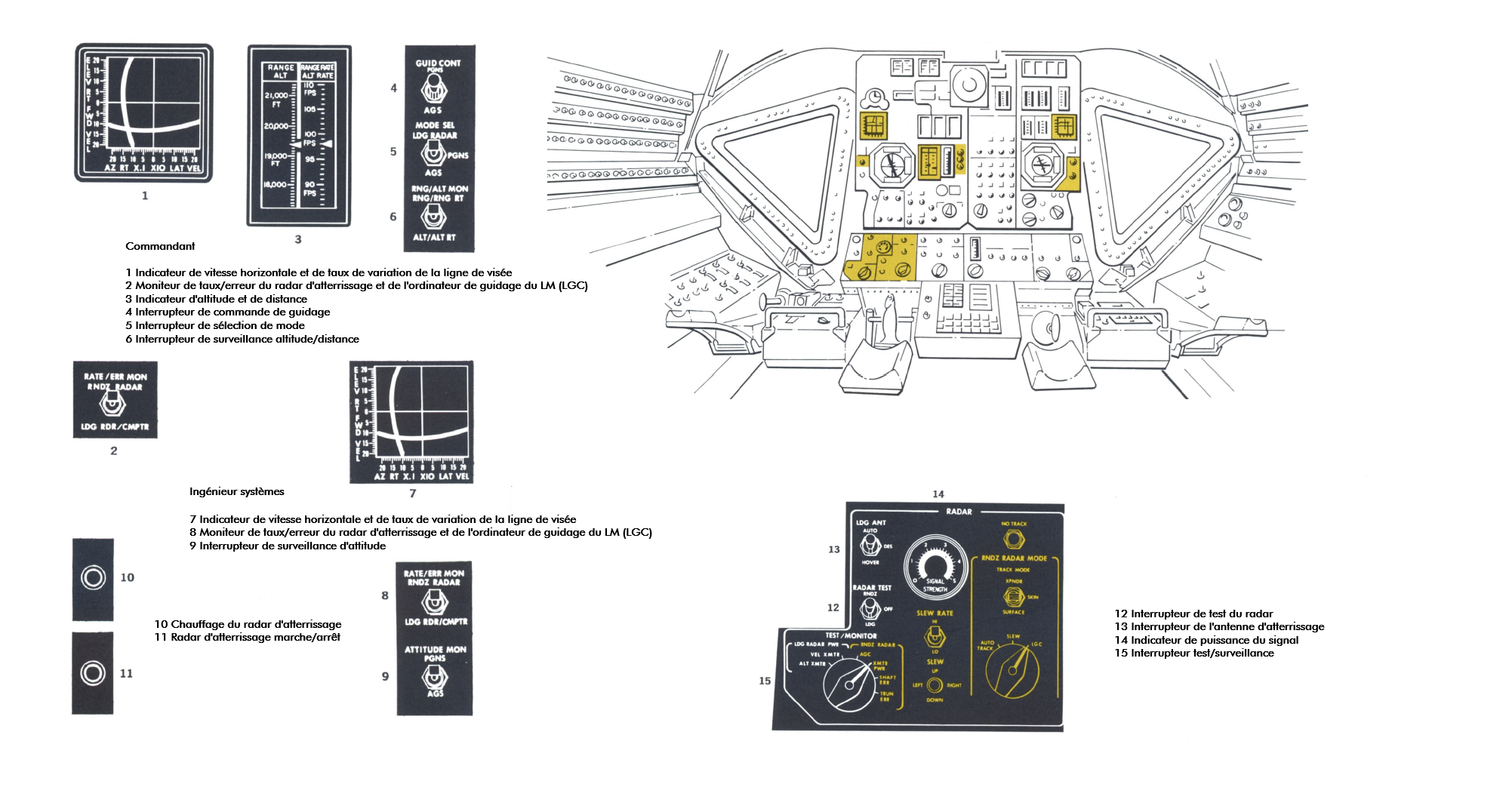
Le radar est allumé pour la première fois et vérifié pendant 5 min lors de la vérification du LM avant la séparation du CSM. Pour ce faire, il faut d'abord activer manuellement le LR en fermant le disjoncteur 4CB1O5 sur le panneau 11, puis, après une période de chauffe d'une à deux minutes, positionner le commutateur "Autotest Radar" (17S6) sur le panneau 3 sur "LDG". Cela permet de fermer le contact avec le radar, ce qui est utilisé comme une commande d'activation du BIT qui permet de générer des signaux d'autotest internes. Cela permet de fermer le contact avec le radar, ce qui est utilisé comme une commande d'activation du BIT qui permet de générer des signaux d'autotest internes. Ces signaux d'autotest représentent des retours Doppler simulés "connus" qui, après avoir été traités par le radar, sont mis à la disposition du LGC et présentés sur les indicateurs de l'astronaute, où ils sont représentés sous forme de portée et de vitesse et peuvent être contrôlés en termes de présence et de précision. Une auto-vérification supplémentaire est effectuée en positionnant le sélecteur de mesure (17S8 sur le panneau 3) sur la position LR "ATM" ou "VSOM", et en surveillant le "compteur de puissance du signal" pour une lecture de la puissance de sortie relative de chaque émetteur. Une lecture à mi-échelle indique le niveau minimum de puissance de sortie. Si l'auto-vérification ci-dessus est réussie, 4CB1O5 et 17S6 sont remis en position "OFF ".
Événements de trajectoire lors de la mission Apollo 11
1) Le radar est à nouveau testé de la même manière 15 min avant la descente motorisée du LM, à environ 21336 m (70 000 ft) au-dessus de la surface lunaire.
2) Initiation de la descente motorisée (moteur allumé) à 15240 m (50 000 ft) d'altitude, vitesse horizontale de 6083 km/h (3780 mph)
3) Le LR est activé à environ 15 057 m (49 400 ft) au-dessus de la surface lunaire et le reste jusqu'à l'atterrissage, environ 11 minutes plus tard. Il se réchauffe pendant 30 s
4) Manœuvre de lacet de 174° pour lever les hublots d'observation avant. Dans cette position, les faisceaux du LR sont dirigés vers la surface lunaire provoquant ainsi un contact radar. Altitude 13807 m (45 300 ft), vitesse horizontale d'environ 4490 km/h (2790 mph), taux de descente d'environ 60 km/h (37,5 mph)
5) Acquisition de l'altimètre, première mise à jour radar de l'ordinateur de guidage du LM, altitude 12040 m (39 500 ft), vitesse horizontale de 3379 km/h (2100 mph), taux de descente d'environ 101 km/h (63 mph), angle de tangage de 80°. Les données de distance oblique sont disponibles pour le PGNS
6) Mise à jour du radar d'atterrissage (altitude : dérivée de la distance oblique) du PGNS, altitude de 8412 m (27 600 ft), vitesse horizontale de 1963 km/h (1220 mph), taux de descente de 144 km/h (90 mph), angle de tangage de 70°
7) Acquisition de la vitesse (avant et latérale), le troisième faisceau (faisceaux du LR n°1, 2 et 4) prospectif se verrouille sur la surface lunaire à 7071 m (23 200 ft). Lorsque cela se produit, l'astronaute verra la distance oblique sur son indicateur d'affichage de distance et de taux de distance (compteur 9M9). Les données de distance seront également disponibles pour le LGC à partir de ce point jusqu'à l'atterrissage. Les données relatives à la distance oblique affichées sont continuellement rafraichies et corrigées par une multiplication de 0,96 pour donner à l'astronaute une meilleure indication de sa véritable altitude par rapport à la surface lunaire. La vitesse horizontale est d'environ 1448 km/h (900 mph), le taux de descente d'environ 141 km/h (88 mph) et l'angle d'inclinaison de 65°
8) "High Gate" (porte haute : terme dérivé de la terminologie des pilotes d'avion et fait référence au début de l'approche d'un aéroport. La phase d'approche est conçue pour permettre au pilote de surveiller visuellement, par le hublot, l'approche de la surface lunaire), début de la phase de visibilité ; première vue du site d'atterrissage par l'astronaute ; passage de l'antenne radar de la position de descente à la position de vol stationnaire. altitude d'environ 2133 m (7000 ft), vitesse horizontale d'environ 563 km/h (350 mph), taux de descente d'environ 160 km/h (100 mph), angle de tangage de 51°
9) Cible à 609 m (2000 ft) vitesse horizontale de 201 km/h (125 mph), vitesse de descente d'environ 59 km/h (37 mph)
10) "Low Gate" (porte basse, toujours selon la terminologie des pilotes d'avion : phase conçue pour assurer une évaluation visuelle continue du site d'atterrissage), début possible du contrôle manuel de la descente, altitude 152 m (500 ft), vitesse horizontale de 69 km/h (43 mph), taux de descente d'environ 16 km/h (10,2 mph ou 15 ft/s), angle de tangage d'environ 22°
11) Contrôle manuel de l'attitude aux environs de la cible à 60 m (200 ft), annulation des vitesses horizontales au-dessus du site d'atterrissage. le LM se cabre pour orienter son axe X perpendiculairement à la surface ; tous les vecteurs de vitesse sont proches de zéro
12) Taux de descente de 0,9 m/s (3 ft/s) à environ 39-33 m (130-110 ft) au-dessus de la surface. Contrôle manuel ou automatique. Pendant cette phase, les astronautes surveillent les données d'altitude et de vitesse fournies par le radar jusqu'au toucher des roues
LES SONDES DE DÉTECTION DE SURFACE
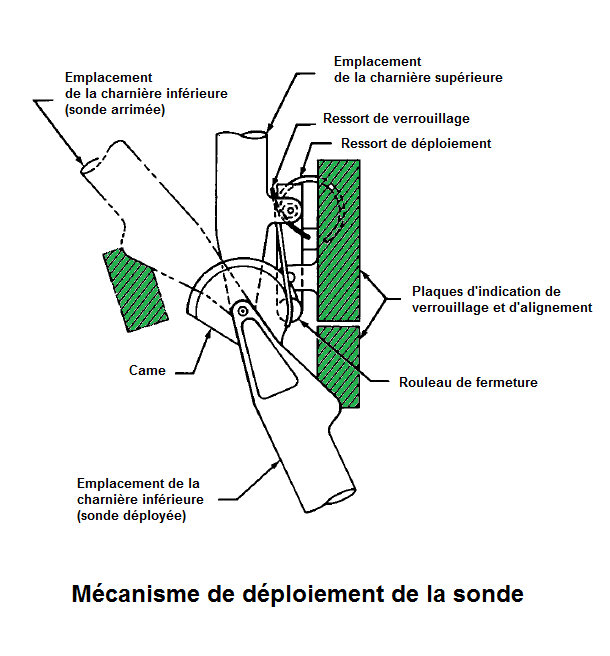
Fixée à chaque patin, sauf celui sur la partie avant du train d'atterrissage (où est installée l'échelle de descente), se trouve une sonde d'environ 1,70 m (5,6 ft) de long, conçue pour détecter la proximité de la surface lunaire, afin de signaler au pilote de couper le moteur de descente. La sonde se compose de deux éléments principaux : l'assemblage de la perche qui contient le mécanisme de déploiement, et le sous-ensemble de commutateur de la sonde, qui est un dispositif électromécanique.
 |
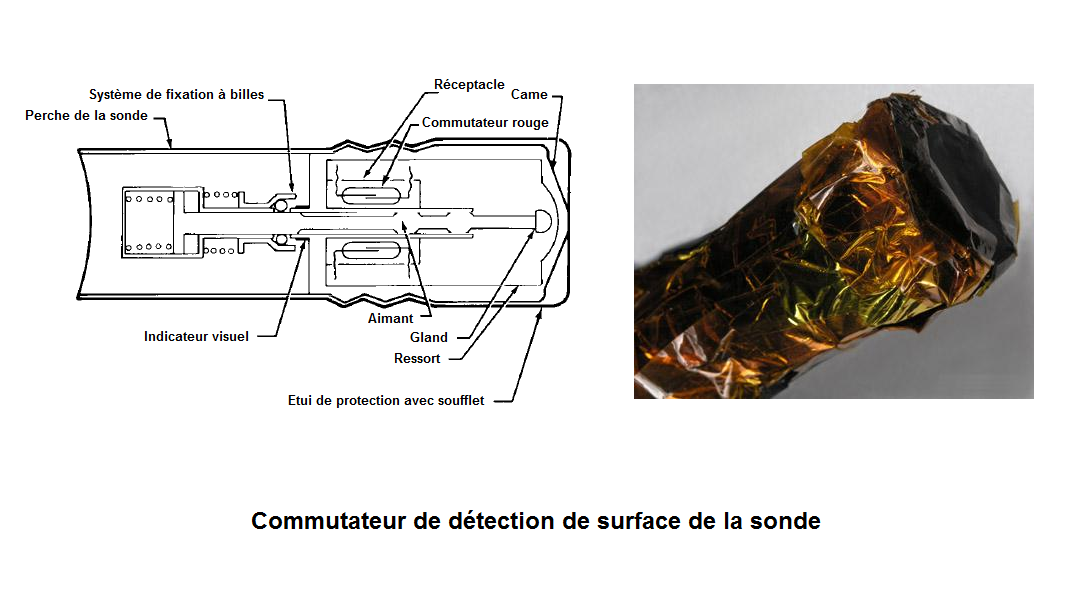 Schéma du commutateur de détection |
L'activation du commutateur par contact avec la surface lunaire déclenche un témoin lumineux bleu qui s'illumine dans la cabine, signalant ainsi à l'équipage d'arrêter manuellement le moteur de descente. L'ensemble de la sonde est constitué de deux composants qui sont articulés au mécanisme de déploiement. La sonde est constituée d'une perche de type tube creux en alliage d'aluminium 2024 et fait environ 3,2 cm (1,25 inch) de diamètre. La partie supérieure de la perche est boulonnée au patin. Le déploiement de la sonde se compose de deux équipements reliés par une broche commune. Fixés à la partie inférieure de la charnière de montage et au lien de verrouillage se trouvent les indicateurs de verrouillage.
Ces plaques sont peintes d'un vert lumineux. Lorsque la sonde est bien verrouillée vers le bas, les plaques forment une ligne droite ininterrompue, sinon, elles montrent une ligne interrompue. Ces indicateurs visuels sont le seul moyen de déterminer que les sondes sont correctement verrouillées.
 |
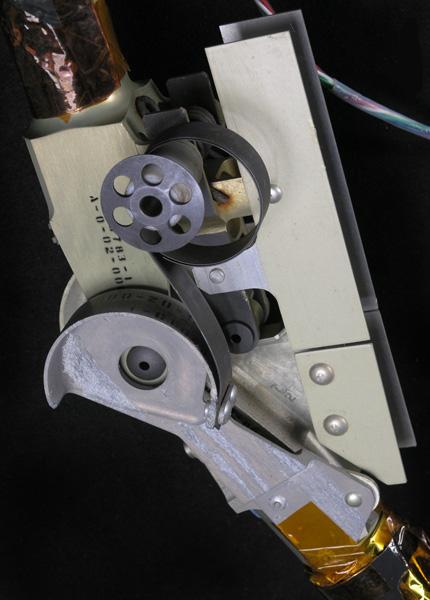 Crédit photo : space1.com |
Le deuxième composant majeur de la sonde est le sous-ensemble du commutateur de détection. Ce mécanisme, logé dans un réceptacle, permet d'actionner le commutateur avec une force surfacique aussi faible que 1,5 kg/ 6,45 cm² (3 livres/pouce², voir schéma du commutateur de détection). Une pression sur le mécanisme déplace une came qui actionne un piston au centre du commutateur. En bougeant, le piston déplace un aimant qui ouvre le contact sur deux commutateurs à lames souples (contact reed). Quand ces commutateurs s'ouvrent, les deux lampes signalant le contact lunaire dans la cabine s'illuminent.
Le circuit est redondant dans la mesure où les deux contacts reed d'une simple sonde doivent s'ouvrir pour produire un signal de contact lunaire. Cela prévoit la possibilité d'un échec d'un commutateur en position ouverte. En outre la fiabilité est assurée par les trois sondes, n'importe laquelle peut activer le circuit du signal de contact lunaire.
L'ECS
La majeure partie du système de contrôle de l'environnement se situe dans la cabine même du LM. L'équipement périphérique de l'ECS , comme les réservoirs d'oxygène et d'eau, sont placés à l'extérieur de la cabine, certains sur l'étage de remontée, d'autre dans celui de descente. Un réservoir O2 situé dans l'étage de descente fournit l'oxygène pendant la descente et le séjour lunaire.
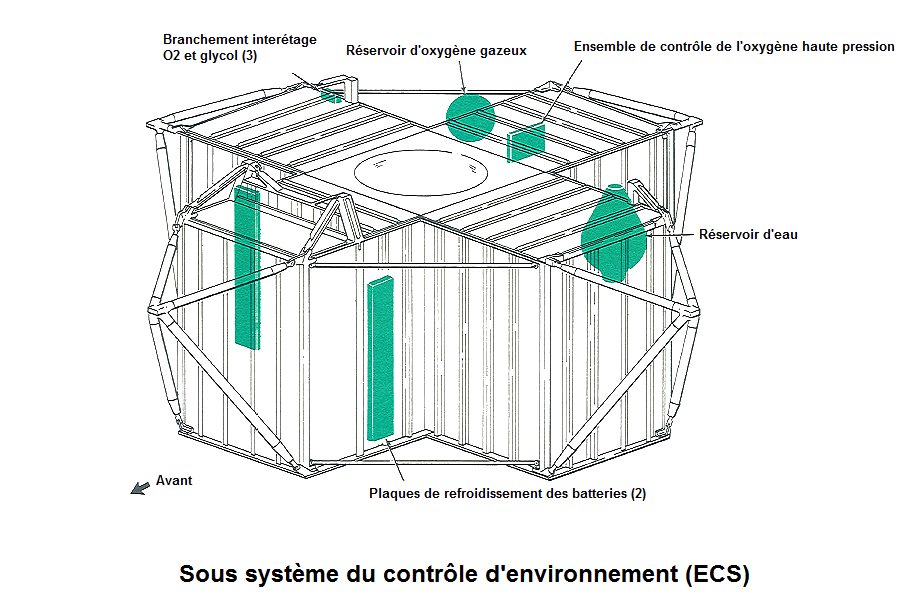
Pour les missions H (Apollo 11, 12, 13, 14), l'étage de descente abrite un réservoir d'eau dans le quad 2 (pour les mission J, se sera 2 réservoirs, le second se trouvant dans le quad 4). Le réservoir d'eau de l'étage de descente ainsi que les deux réservoirs de l'étage de remontée sont pressurisés avant le lancement, afin de maintenir la pression nécessaire de pompage dans les réservoirs. Le réservoir de l'étage de descente fournit la majeur partie de l'eau nécessaire au séjour lunaire. Après le décollage, l'eau sera fournie par les deux réservoirs de l'étage de remontée. Cette eau sert à se désaltérer, à la climatisation, à la lutte contre d'éventuels incendies, à la préparation de la nourriture, à la recharge du système de refroidissement des PLSS. Elle est délivrée par la section de gestion de l'eau (Water managment section, WMS) via une vanne auto-obturante.
Le réservoir d'eau de l'étage de descente est en aluminium dotés d'un tube vertical et d'une vessie montés à l'intérieur. La vessie contient environ 151 kg d'eau (333 lb) ; l'espace entre la vessie est chargé d'azote selon un programme dépendant de la charge 3,30 bar maximum à 26,6°C (48,2 psia maximum à +80° F). L'azote force l'eau à sortir de la vessie par le tuyau vertical et dans le système. Les sorties du réservoir sont connectées au module de contrôle de l'eau (Water Control Module ou WCM). L'eau du réservoir d'eau de l'étage de descente est acheminée via la vanne de sélection du réservoir d'eau (DES H2O) en la réglant sur la position "descente". Cette vanne est une vanne d'arrêt manuelle à clapet. La vanne a une position ouverte et une position fermée. En position ouverte, elle fournit un débit d'eau à haute pression depuis le réservoir de l'étage de descente jusqu'au distributeur d'eau.
L'étage de descente abrite également une partie de la section du transport de chaleur (HTS pour Heat Transport Section). Les batteries et l'équipement électronique sont montés sur des plaques froides et des rails par lesquels le liquide de refroidissement est acheminé pour capter et transporter la chaleur dégagée. Les plaques froides utilisées pour le matériel qui est nécessaire afin d'interrompre la mission contiennent deux passages séparés du liquide de refroidissement; un pour la boucle principale et un pour la boucle secondaire. La boucle de refroidissement secondaire, n'est utilisée seulement que si la boucle principale est inopérante, elle ne sert que pour ces plaques froides.
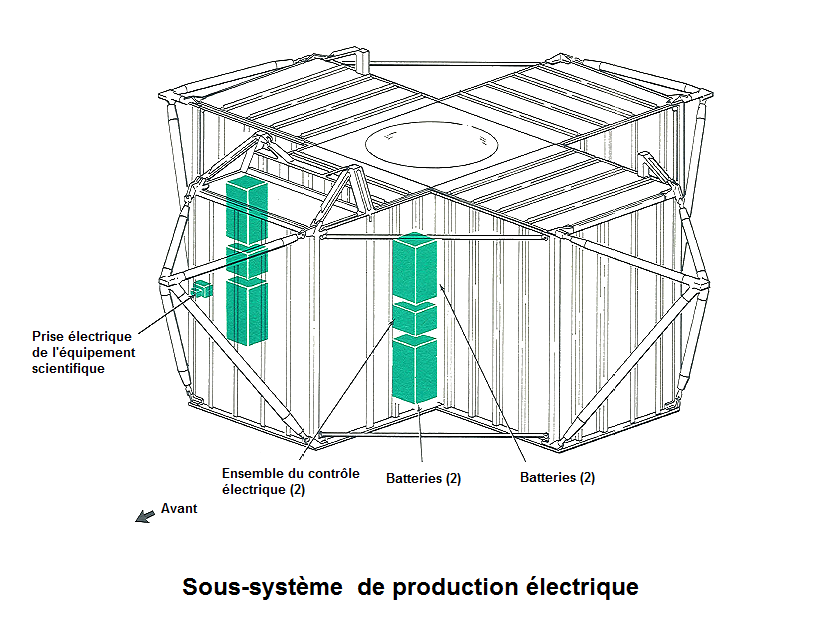
L'ÉNERGIE ÉLECTRIQUE DE L'ÉTAGE DE DESCENTE
Le système électrique du LM est conçu pour :
- une faible puissance pendant le trajet vers la Lune
- des charges élevées pendant la descente lunaire
- des charges plus faibles pendant l'ascension lunaire
- une alimentation électrique redondante permettant de réaliser l'intégralité de la mission (bien que raccourcie) si un système de l'étage de montée ou de descente était perdu.
Petite rétrospective
À l'origine, Le LM, tout comme le CSM, devait être alimenté en courant électrique provenant de piles à combustible. La spécification initiale de l'EPS comprenait les principaux éléments suivants :
- trois piles à combustible (28 V c.c., 1100 watts chacune)
- trois panneaux de supervision électrique (pour assurer le contrôle et la protection de chaque pile à combustible)
- deux ou trois onduleurs (350 volts-ampères, 115 V ac, 400 hertz, monophasé)
- un ensemble de contrôle de l'éclairage (ou LCA pour Lighting-Control Assembly) pour la conversion de l'énergie et le contrôle de la tension variable pour l'équipement d'éclairage
- une batterie de pointe et un chargeur de batterie (la batterie était nécessaire pour répondre à la demande de puissance de 4000 watts).
Mais, au milieu de l'année 1964, d'importantes difficultés techniques sont rencontrées dans les développements des piles à combustible du CSM et du LM. En outre, le temps spécifié entre le décollage lunaire et l'amarrage au CSM est réduit de plus de 20 heures. La diminution des besoins en énergie qui en a résulté a rendu possible l'utilisation d'un système de batterie. En conséquence, une étude de faisabilité est lancée par un contractant afin d'évaluer l'effet de la conversion à une source d'énergie principale de type batterie à l'oxyde d'argent/zinc. Ce type de batterie est considéré comme fiable, est disponible dans le commerce par rapport aux piles à combustible, et a fait ses preuves en vol dans le cadre du projet Mercury et du programme Gemini. L'étude montre qu'il est en effet possible de mettre au point un système de batterie capable de fournir de l'énergie électrique pour un séjour lunaire d'environ 35 h, mais que la masse du système d'alimentation sera supérieur d'environ 45 kg (100 lb) à celui du système à pile à combustible. Il est décidé d'accepter cette pénalité comme étant favorable par rapport aux risques de développement et de fiabilité évalués pour les piles à combustible. Par conséquent, le programme de piles à combustible LM a été réduit en avril 1965 et arrêté le 30 juin 1965 (en même temps que l'attribution du contrat de sous-traitance pour les batteries du LM). La configuration du système de batteries qui est retenue se compose de deux batteries de 8,7 kWh dans l'étage de montée du LM et de quatre batteries de 11,6 kWh dans l'étage de descente (soit un total de 63,8 kWh d'énergie installée).
Les batteries d'alimentation principale de LM sont des batteries primaires (à décharge unique), tandis que les batteries du CM et toutes les batteries pyrotechniques sont des batteries secondaires (rechargeables) à faible durée de vie. Elles assurent l'alimentation en courant du LM, la plupart se trouvent dans l'étage de descente. Identiques, elles sont au nombre de 4 (d'Apollo 9 à 14) puis passe à 5 (à partir d'Apollo 15 avec une "Lunar Battery" supplémentaire). Chaque batterie est composée de plaques en argent et zinc, avec un électrolyte à base d'hydroxyde de potassium et d'eau. Chacune d'elle possède 20 cellules, pèse environ 60 kg et ont une capacité nominale de 400 ampères heure dans des limites de 28,0 à 32,5 volts à un taux de décharge de 25 ampères (25 ampères à 28 volts DC pendant 18 heures à +80°F soit 26,6 °C). Les batteries de l'étage de descente sont montées en parallèle, de sorte qu'elles se déchargent uniformément.
| OBJET | Batteries de l'étage de remontée | Batteries de l'étage de descente |
|---|---|---|
| Voltage nominal V | 29 |
29 |
| Nombre de cellules | 20 |
20 |
| Capacité nominale A-h | 296 |
400 |
| Dimensions (cm/in) | ||
| Longueur | 90,80 cm (35,75 in) |
43,02 cm (16,94 in) |
| Largeur (a) | 12,57 cm (4,95 in) |
22,96 cm (9,04 in) |
| Hauteur | 19,76 cm (7,78 in) |
25,30 cm (9,96 in) |
| Masse | 56,10 kg (123,7 lb) |
60,19 kg (132,7 lb) |
| Type de borne | Goujon borne et écrou |
Goujon borne et écrou |
| Quantité utilisée par véhicule | 2 |
4 |
| Méthode de régulation thermique | Plaque froide (b) |
Plaque froide (b) |
(a) : Exclusion des rails de montage, le cas échéant |
Sources : Apollo experience report : Lunar Module Electrical Power Subsystem de Arturo B. Campos 1972 (PDF) ; Apollo experience report : Battery Subsystem par J. Barry Trout 1972 (PDF) ; Apollo 11 Lunar Landing Radar News Releases, New Photos, System Description (PDF). Texte de Paul Cultrera, tous droits réservés.