L'ÉTAGE S-I
![]()
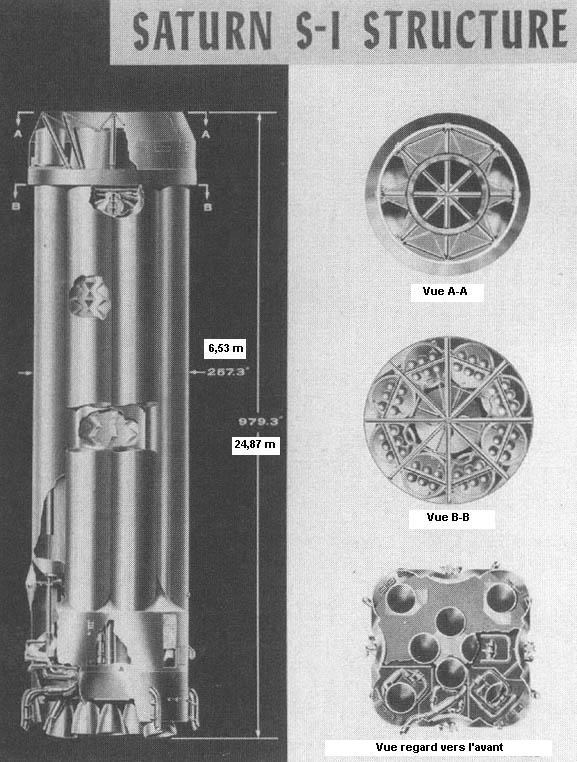
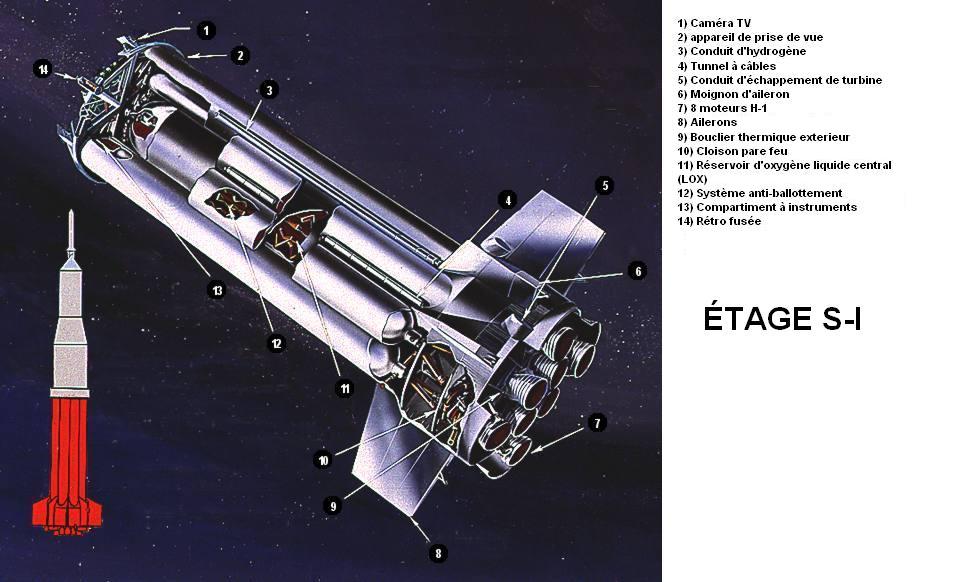
L'étage S-I, premier étage du lanceur Saturn I, est conçu par Wernher von Braun et son équipe, s'inspirant du modèle d'un barillet de revolver Colt. Ce design présente un réservoir central dérivé du missile Jupiter, entouré de huit réservoirs périphériques provenant du missile Redstone. Bien que ces éléments semblent disparates, ils sont tous issus de technologies éprouvées, ce qui confère à l'ensemble une grande fiabilité.
La résolution des problèmes de conception a été facilitée par des essais en soufflerie sur des maquettes à échelle réduite et par l'utilisation d'ordinateurs pour simuler divers scénarios. La solution retenue a été la conception d'une "botte" de tubes, simplement reliée par ses deux extrémités, sans pièces d'attache intermédiaires. À la base, une structure de poussée à huit branches sur laquelle les moteurs sont fixés, et au sommet, une structure en forme de "spider beam" qui sert également de support au second étage du lanceur.
ANECDOTE Eh bien... Non!! Contrairement à une idée reçue largement répandue, le premier étage de Saturn I n'a PAS été fabriqué à partir d'un missile Jupiter et de huit missiles Redstone. Ce mythe souvent partagé sur les réseaux sociaux spécialisés dans le vol spatial, suggère que les ingénieurs de l'ABMA (Army Ballistic Missile Agency, l'Agence des missiles balistiques de l'armée, qui a été à l'origine du développement des véhicules Saturn) sont allés dans un entrepôt, ont pris 8 boosters Redstone et un booster Jupiter sur étagère et les ont simplement attachés ensemble pour en faire le lanceur Saturn I. Mais c'est complètement faux ! Je vais donc mettre fin à ce mythe en apportant des précisions, tout en nuançant mes propos (voir encadré ci-dessous), et expliquer pourquoi cette idée est erronée.
Tout d'abord, nous parlons de "réservoirs" qui, dans le cas des IRBM (Intermediate Range Ballistic Missile pour missile balistique à portée intermédiaire), représentent environ les deux tiers de la longueur du véhicule. La longueur totale se compose des réservoirs, du compartiment moteur, d'une section è instruments, d'un nez et d'une tête de combat. Étant donné que le Saturn I n'a pas de tête de combat et que sa section à instruments est située au-dessus des réservoirs lesquels sont empilés sur le compartiment moteur, notre discussion se concentre uniquement sur les sections des réservoirs. Bien entendu, l'ABMA (qui, le 1er juillet 1960, est intégrée à la NASA sous le nom de Marshall Space Flight Center, ou MSFC) et la NASA elle-même ajoutent à la confusion en affirmant à plusieurs reprises que l'étage S-I est composé de "huit réservoirs Redstone et d'un réservoir Jupiter". Cette simplification excessive vise à favoriser la compréhension, mais elle est extrêmement trompeuse et a contribué à la création de ce mythe populaire.Il s'agit également d'une stratégie de relations publiques destinée à renforcer la confiance dans le nouveau booster. En effet, le Redstone et le Jupiter ont tous deux montré une fiabilité remarquable et un excellent bilan de lancement. Après tout, si l'étage S-I est composé de ces machines de confiance, il devrait être tout aussi fiable.. n'est-ce pas ? Ce projet débute à une époque où les critiques au Cap qualifient le concept de moteur en grappe de Saturn de "grappe de la dernière chance", de sorte que la NASA et le MSFC ont besoin de toute la publicité possible pour le programme. Curieusement, le bureau des affaires publiques de la NASA continue à affirmer que l'étage S-IB est fabriqué à partir de fusées Redstone et Jupiter jusqu'à la fin du programme Skylab. À ce moment-là, la plupart des gens ignorent ce qu'était un IRBM Jupiter, et le Redstone était déjà une pièce de musée depuis plus de dix ans. Pour la construction du Saturn I, les responsables de l'ABMA utilisent les mêmes gabarits de construction, outils, méthodes et main-d'œuvre que ceux employés pour fabriquer les réservoirs des missiles Redstone et Jupiter. Ces réservoirs ont le même diamètre et la même épaisseur de paroi que ceux des IRBM, mais ils n'ont absolument RIEN d'autre en commun. En utilisant les mêmes gabarits de construction, outils, méthodes et talents que ceux utilisés sur les IRBM, l'ABMA bénéficie d'un gain de temps et d'un meilleur contrôle de la qualité. Cependant, les cloisons et dômes des réservoirs utilisés dans les IRBM ne figurent pas dans les réservoirs de Saturn I, pas plus que tout autre raccord, chaque réservoir étant conçu spécifiquement pour Saturn. Les corps principaux des réservoirs sont réalisés en enroulant des plaques d'aluminium dans des cadres en "C", chacun mesurant environ 1,56 m (5,12 ft) de long. Ces cadres sont soudés par points, deux par deux, pour former des anneaux. Ces anneaux, auxquels on ajoute des longerons, sont empilés pour créer le cylindre constituant la majeure partie du réservoir. Les dômes des réservoirs sont fabriqués par un procédé appelé hydroformage. Sur la Saturn I Block II, les réservoirs sont allongés à 19,04 m (62,47 ft) pour les huit réservoirs extérieurs et à 19,95 m (65,8 ft) pour le réservoir central. Cela permet à l'étage de transporter environ 100 000 lb (45 400 kg) d'ergols supplémentaires, prolongeant ainsi la durée de combustion. |
Caractéristiques du S-I
Longueur : 24,87 m.
Diamètre : 6,53 m.
Masse à vide : 45 267 kg.
Masse à pleine charge : 432 681 kg.
Nombre de moteurs : 8.
Poussée (kN) : 7582.
ISP (en seconde) : 288.
ISP (kN-s/kg) : 2,82.
Temps de combustion (s) : 150.
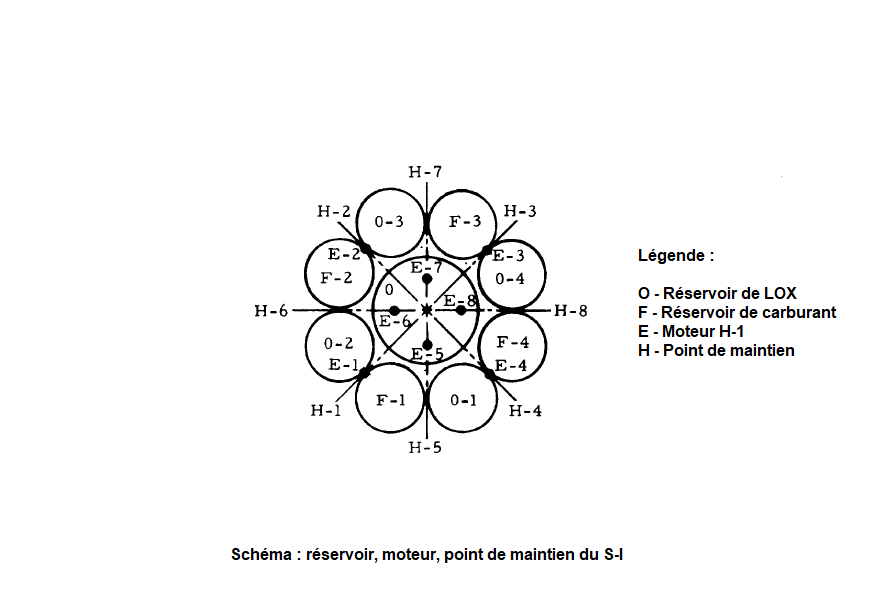
Ergols : LOX et RP-1, 5 réservoirs d'oxygène liquide (LOX), et 4 réservoirs de carburant (Kérosène RP-1).
 S-I Block I |
 S-I Block II |
LES ÉLÉMENTS DU S-I
LES MOTEURS H1 : voir la page consacrée.
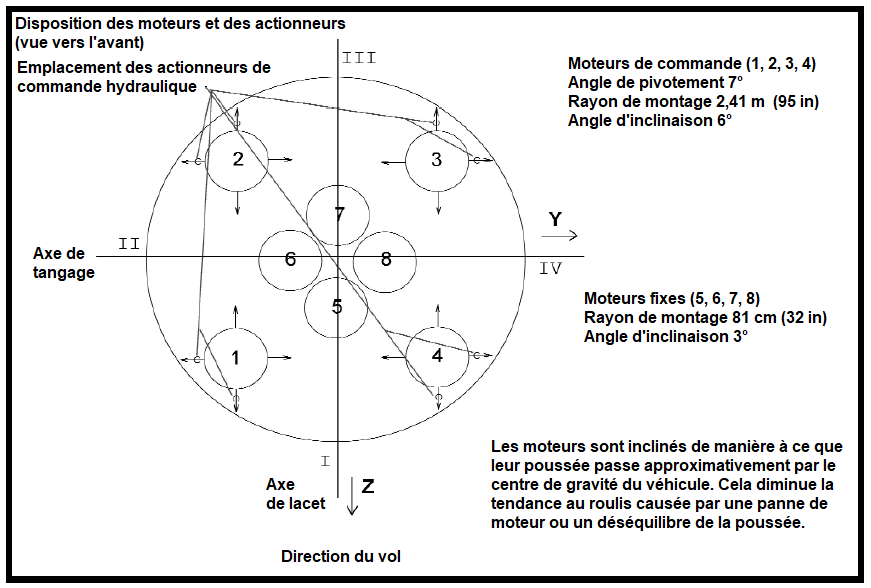
Quatre moteurs, situés au centre, sont disposés en carré autour de son axe et légèrement inclinés vers l’extérieur. Les quatre autres moteurs, placés à l'extérieur forment un carré plus grand décalé de 45° par rapport aux moteurs centraux. Contrairement à ces derniers, les moteurs extérieurs sont montés sur un système de cardan, ce qui signifie qu’ils peuvent pivoter selon un arc de 14° dans deux directions. Cette configuration est appelée schéma de cardan carré ±7° (±7° square gimbal pattern). Les moteurs extérieurs, grâce à leur montage sur cardan, permettent de diriger le lanceur, tandis que l’instrumentation embarquée corrige toute déviation de la trajectoire propulsée. Le lanceur Block I, ne disposant pas d’ailerons, repose exclusivement sur l’orientation des moteurs pour assurer son guidage et sa stabilité dans les basses couches de l’atmosphère.
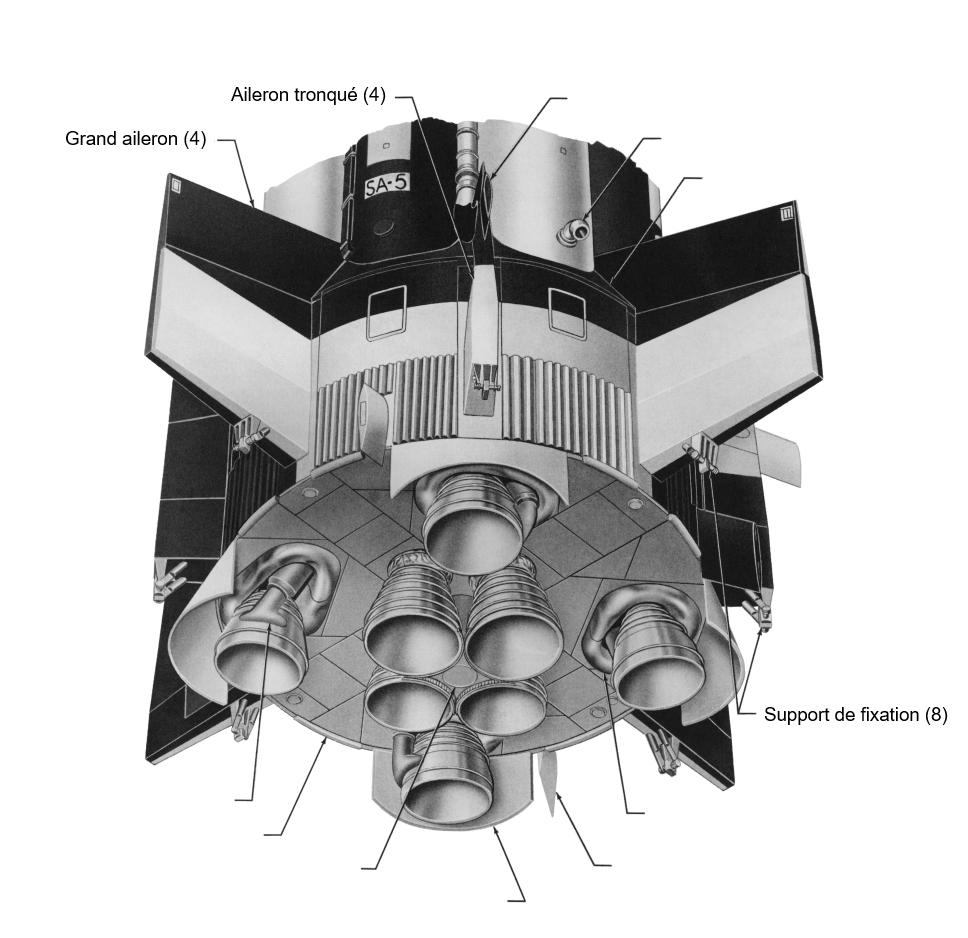
LES AILERONS DE STABILISATION (Block II)
Ils sont au nombre de huit (quatre grands et quatre petits, à partir du vol SA-5) et sont fixés à la section de queue du lanceur. Leur rôle principal est d’assurer la stabilisation aérodynamique du lanceur lors de la première phase du vol, en tant qu’éléments passifs, car ils ne sont pas orientables. Les ailerons servent également de points d’appui au véhicule sur la plateforme de lancement. Les charges de maintien et de support sont transmises aux stabilisateurs de la structure de poussée. Les deux types d’ailerons ont une forme trapézoïdale :
Les grands ailerons ont une surface de 11,89 m² (128 ft²).
Les petits quant à eux ont une surface de 4,83 m² (52 ft²).
Les bords d'attaque, en acier, sont inclinés de 20° vers l'arrière. Le reste de la structure des ailerons est en alliage d'aluminium avec une isolation ablative sur la surface extérieure.
Les petits ailerons sont positionnés au niveau des moteurs extérieurs, tandis que les grands ailerons sont placés à intervalles réguliers entre eux. Ces derniers sont installés une fois que l’étage S-I Block II est en place sur sa table de lancement.
 Positionnement des ailerons du Block II |
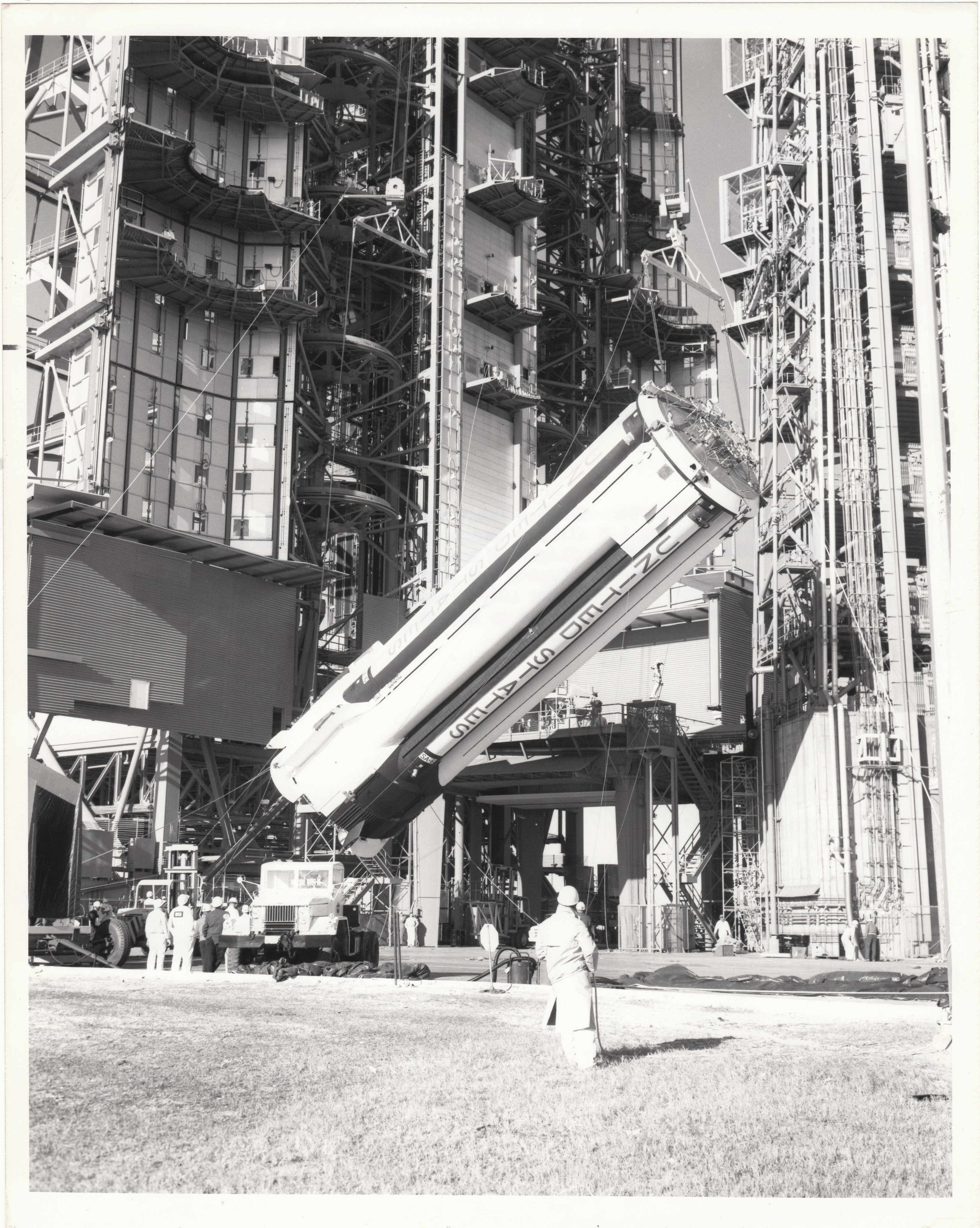 Levage de l'étage S-1 du vol SA-6, notez l'abscence des grands ailerons. Crédit photo de Mike Acs (flickr) |
La section de queue supporte les huit moteurs H-1 et transmet les charges de poussée aux cinq réservoirs de comburant (LOX). Elle soutient également les quatre réservoirs de carburant (RP-1) et protège les moteurs ainsi que les installations associées des charges aérodynamiques et de l'échauffement des moteurs. Dans la version Block II, les charges de maintien sont transmises à la section de queue par les ailerons. Cette section est composée d'une structure de poussée, de haubans et d'un bouclier thermique, assemblés pour former un ensemble structurel cohérent.
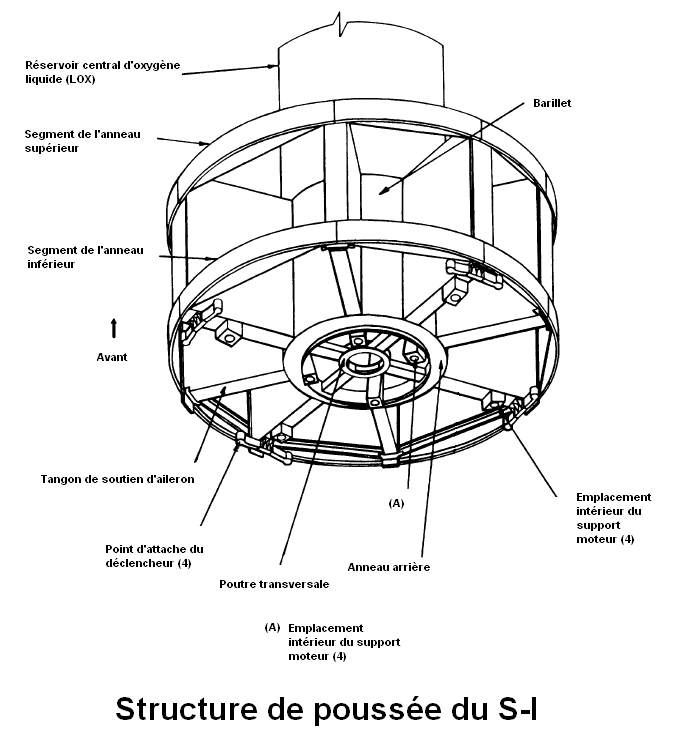
LA STRUCTURE (OU BÂTI) DE POUSSÉE
Elle supporte les réservoirs d'ergols sur sa face intérieure tandis que sa face extérieure accueille les fixations pour les 8 moteurs H-1. Les charges de poussée des moteurs centraux sont transmises au barillet de la structure de poussée qui mesure 2,66 m (105 in) de diamètre et environ 1,90 m (75 in) de hauteur. Les charges latérales, résultant des moteurs inclinés, ainsi que les charges axiales sont transmises à l'anneau arrière du barillet par l’intermédiaire des supports moteurs. L'anneau arrière est une section renforcée constituée de structures en caissons. À l’intérieur de cet anneau, une structure en poutre transversale est fixée et soutient les déclencheurs des liaisons fixes, qui maintiennent les moteurs centraux. Enfin, les charges axiales sont transmises aux longerons coniques par l’intermédiaire de l’anneau arrière.
 |
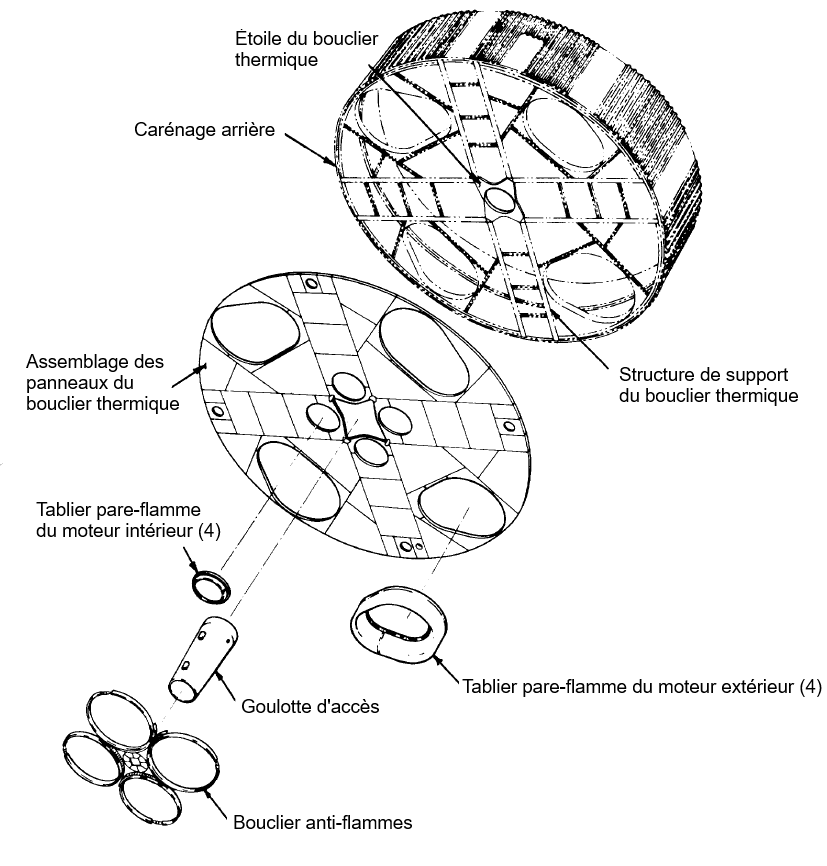 Assemblage du bouclier thermique |
LA PROTECTION THERMIQUE
Block I : Lors de la conception du groupe propulsif de Saturn en 1958, les ingénieurs gardent en mémoire les taux élevés d’échauffement de la base observés lors du programme Jupiter et d’autres projets de missiles. Cet aspect devient immédiatement une priorité dans le développement du lanceur.
Les concepteurs de la structure et du système propulsif de la configuration initiale des moteurs envisagent d’abord une disposition circulaire. Cependant, ils anticipent que cette configuration entraînerait une recirculation prononcée des gaz de combustion chauds à l’intérieur du cercle des moteurs, ainsi qu’un apport thermique radiatif important dans cette même zone. Ce raisonnement est plus tard confirmé par l’expérience acquise sur le missile Polaris. Pour pallier ce problème, les quatre moteurs fixes sont placés aussi près que possible les uns des autres au centre de la structure. L’espace libre entre les quatre tuyères est obturé par un écran pare-flammes, empêchant ainsi la circulation des gaz chauds vers la base du lanceur à des altitudes plus élevées. Cette disposition permet de confiner la recirculation des gaz et le rayonnement thermique intense à une zone restreinte, plus facile à protéger. Les quatre moteurs extérieurs, montés sur cardan, sont disposés autour des moteurs centraux à une distance optimisée pour limiter, dans les contraintes de conception, les interférences entre les jets.
Afin de protéger le compartiment moteur contre la recirculation des gaz à haute température dans la zone située à l'avant du bouclier pare-flamme, un bouclier thermique de base est installé perpendiculairement à l'axe du lanceur, approximativement au niveau du plan de gorge des huit moteurs-fusées. Étant donné que les charges aérodynamiques ne doivent pas s’exercer sur ces moteurs, chacun des moteurs extérieurs est protégé par un carénage s’étendant au-delà du bouclier thermique. Des écopes sont disposées sur ces carénages ainsi que dans les zones intermédiaires afin d'injecter de l’air ambiant frais et ainsi refroidir ces régions du bouclier thermique.
La turbine à gaz du moteur H-1 rejette un gaz d'échappement riche en carburant. Lorsqu’ils sont évacués dans la région de base, ces gaz provoquent une postcombustion entraînant des taux de chauffage élevés, comme cela a été observé sur le missile Jupiter. Pour les moteurs internes du S-1, les gaz d’échappement des turbines sont évacués vers l’extérieur via des conduits. Cependant, comme le générateur de gaz et la turbine sont fixés au moteur, l’évacuation des gaz des turbines des moteurs extérieurs (mobiles) directement dans le flux ambiant est mécaniquement complexe. C’est pourquoi ces gaz sont évacués à l’aide d’un extracteur (ou aspirateur) situé autour de la sortie de chaque tuyère des moteurs extérieurs.
Le bouclier thermique se compose d'une couche extérieure de ruban réfléchissant en aluminium, d'une fine couche de sous-couche basse température (T-500 Thermolag) et d'un isolant époxy phénolique chargé (X-258) qui est collé à la partie métallique ou à la plaque structurelle du bouclier thermique. La bande réfléchissante a été ajoutée pour retarder la sublimation du matériau de surface, provoquée par le niveau de rayonnement initial élevé au moment du lancement. Toutefois, elle n’était pas conçue pour résister à l’ensemble de la durée du vol. Lors des vols SA-1 et SA-2, il a été observé que de petites portions du ruban s’étaient détachées dès le décollage.
Avant le vol SA-I, il avait été difficile d’obtenir une bonne adhérence entre la bande réfléchissante et le substrat. L’humidité absorbée par le matériau de base du bouclier avait entraîné un décollement du ruban de la structure de base, ce qui a nécessité son retrait et l’application d’un nouveau ruban. Des mesures ont été prises pour résoudre ce problème lors des vols suivants du Bloc I.
Le pare-flammes est constitué d'une plaque en acier de construction et d'un matériau isolant en amiante phénolique stratifié (CT-301). L’espace entre le bouclier de protection contre les flammes et la paroi de la tuyère du moteur intérieur est scellé de manière à empêcher les gaz inversés de pénétrer directement dans le bouclier de base. La zone située entre les parois du moteur extérieur et le bouclier thermique est entourée de rideaux flexibles recouverts d'une couche extérieure en tissu "Refrasil" et d’une bande réfléchissante. Pour les vols SA-3 et SA-4, des échantillons de panneaux d’essai du matériau envisagé pour le bouclier thermique du Bloc II ont été utilisés.
Block II : L’extrémité inférieure du compartiment arrière est fermée par le bouclier thermique, qui protège contre la chaleur émise par les moteurs. Composé de panneaux raidis en acier inoxydable, le bouclier thermique est recouvert d'un isolant ablatif sur sa face arrière. Les panneaux sont soutenus par un ensemble de poutres transversales fixées à l’extrémité arrière du carénage. Des découpes sont prévues dans le bouclier pour permettre le montage des moteurs extérieurs. Ces ouvertures, ainsi que celles des moteurs intérieurs, sont fermées par des rideaux flexibles fixés aux moteurs et au bouclier thermique. Les rideaux sont fabriqués à partir de tissu en fibre de verre et de Refrasil. L’accès au compartiment est assuré par huit portes situées dans le bouclier thermique. Le bouclier anti-flammes est soutenu par la goulotte d’accès conique, qui est fixée au bouclier thermique. À l’extrémité avant, la goulotte d’accès est reliée à l’étoile du bouclier thermique (la partie centrale de celui-ci). Le bouclier thermique est situé entre les quatre moteurs intérieurs, au niveau des sorties de la chambre de poussée. Il est fabriqué en acier inoxydable et est fixé aux chambres de poussée des moteurs intérieurs à l’aide de bandes d’acier isolées par un tissu en fibre de verre. Les quatre jupes moteur fixées au bouclier thermique protègent les moteurs des forces aérodynamiques, évitant ainsi des charges excessives sur les actionneurs de commande. Les jupes des moteurs sont des segments coniques de 81,28 cm (32 in) de long. La surface intérieure des jupes sous le bouclier thermique est protégée de la chaleur des moteurs par une couche d’isolant ablatif.
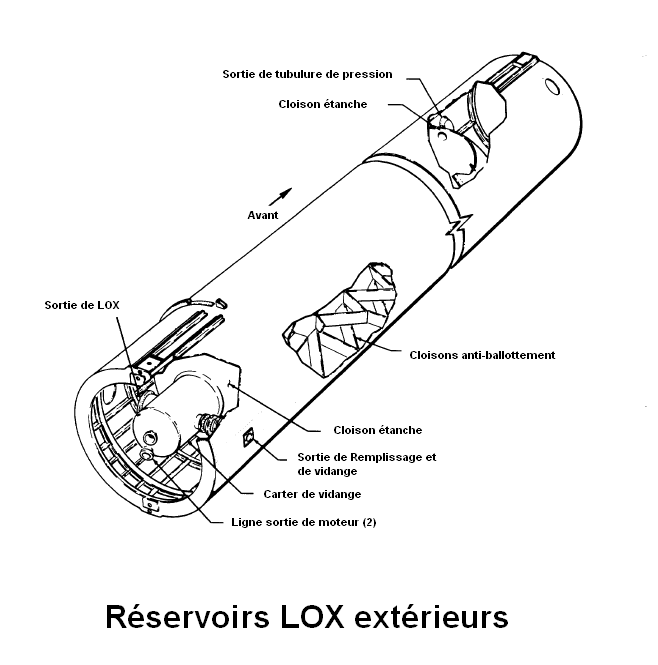
LES RÉSERVOIRS D'OXYGÈNE LIQUIDE (LOX)
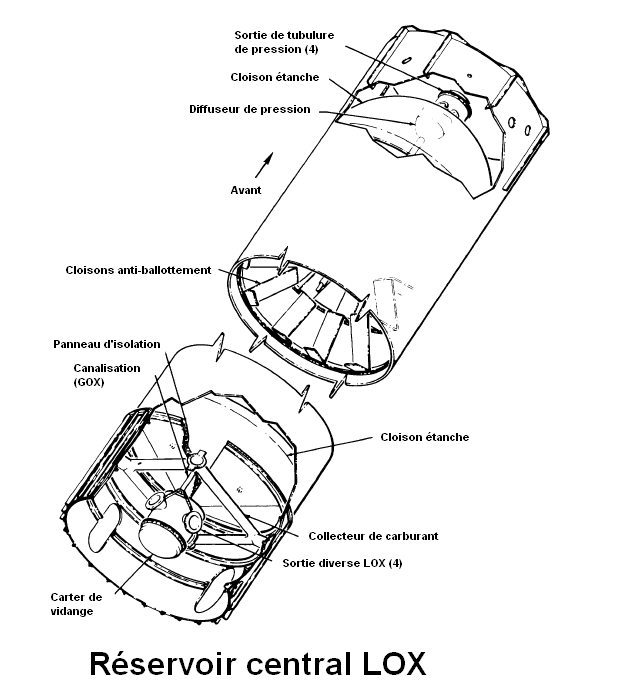
Ils sont au nombre de cinq : un central et quatre extérieurs. Environ 36 % du LOX destiné à l'étage S-I est contenu dans le réservoir central. Ce dernier, de forme cylindrique avec des cloisons torisphériques, mesure 2,66 m (105 in) de diamètre et 17,22 m (678 in) de long. Conçu pour supporter la pressurisation du vol et les charges d'ergols dues à l'accélération, le réservoir central transmet également une partie de la charge de poussée de la structure de poussée à l'adaptateur du deuxième étage.
L'extrémité arrière du réservoir est fixée au barillet de la structure de poussée, tandis que son dôme avant est attaché à la poutre araignée ("spider beam") de l'adaptateur du deuxième étage. La section cylindrique, fabriquée en alliage d'aluminium 5456, mesure 19,02 m (749 in) de long (hors tout). Des cloisons torisphériques en alliage d'aluminium 5086 sont intégrées aux extrémités avant et arrière du cylindre. Ces cloisons sont reliées au cylindre par des soudures circonférentielles. La cloison arrière est équipée d'un puisard avec quatre sorties pour le raccordement au collecteur LOX. La cloison avant comporte quatre sorties pour le raccordement au collecteur de pression et trois sorties pour le raccordement aux conduites de ventilation. Un diffuseur de pression est monté sur la cloison avant. Dans la zone située au-dessus et au-dessous du réservoir (les jupes avant et arrière), des longerons sont fixés à la peau cylindrique. Ces longerons servent à répartir les charges reçues vers les points d'appui du réservoir. Des découpes sont prévues dans la peau à l'avant du réservoir pour les conduites de pressurisation et de ventilation. Les découpes à l'arrière du réservoir sont destinées aux collecteurs LOX et de carburant (lignes d'interconnexion). Des anneaux circulaires, soudés à l'intérieur de la section cylindrique, soutiennent les cloisons anti-ballottement, qui sont disposées en huit rangées verticales équidistantes autour de la périphérie du cylindre.
Chacun des quatre réservoirs extérieurs contient environ 16 % du LOX destiné à l'étage S-I. Ces réservoirs sont de forme cylindrique, avec des cloisons hémisphériques étanches, un diamètre de 1,78 m (70 in) et une longueur de 17,22 m (678 in). La section cylindrique est fabriquée en alliage d'aluminium 5486 et mesure 18,94 m (746 in) de long, hors tout. Conçus pour supporter la pressurisation en vol et les charges d'ergols dues à l'accélération, ces réservoirs transmettent également la charge de poussée de l'empennage à l'adaptateur du deuxième étage. À l'arrière, les réservoirs sont soutenus par les stabilisateurs de la structure de poussée, tandis qu'à l'avant, ils sont fixés à la "spider beam" de l'adaptateur du deuxième étage. Chaque stabilisateur comporte deux points d'appui opposés pour chaque réservoir, permettant la transmission des charges axiales et latérales. De même, la "spider beam" possède également deux points d'appui diamétralement opposés pour chaque réservoir. Chaque point d'appui transmet les charges axiales et latérales.
Chaque point d'appui consiste en un goujon de montage réglable, destiné à transmettre les charges axiales et latérales. La section cylindrique, fabriquée en alliage d'aluminium 5486, a une longueur de 18,94 m (746 in). Aux extrémités avant et arrière du cylindre, des cloisons hémisphériques en alliage d'aluminium 5086 sont encastrées. Ces cloisons sont soudées au cylindre par des soudures circonférentielles. La cloison arrière dispose d'un puisard avec trois sorties : deux pour les conduites du moteur et une pour le collecteur LOX (conduite d'interconnexion). Le réservoir O3 présente une sortie supplémentaire pour le remplissage et la vidange. La cloison avant comprend une sortie pour la connexion à un collecteur de pression. Dans la zone au-dessus et en dessous du réservoir (jupes avant et arrière), des longerons longitudinaux sont fixés à la peau cylindrique. Ces longerons répartissent les charges concentrées reçues aux deux points d'appui du réservoir. La peau au-dessus et en dessous du réservoir comporte des découpes pour les lignes de raccordement aux différentes sorties. À l'intérieur de la section cylindrique, des anneaux circulaires soudés soutiennent les cloisons anti-ballottement, disposées en six rangées verticales espacées de manière uniforme autour de la périphérie du cylindre.
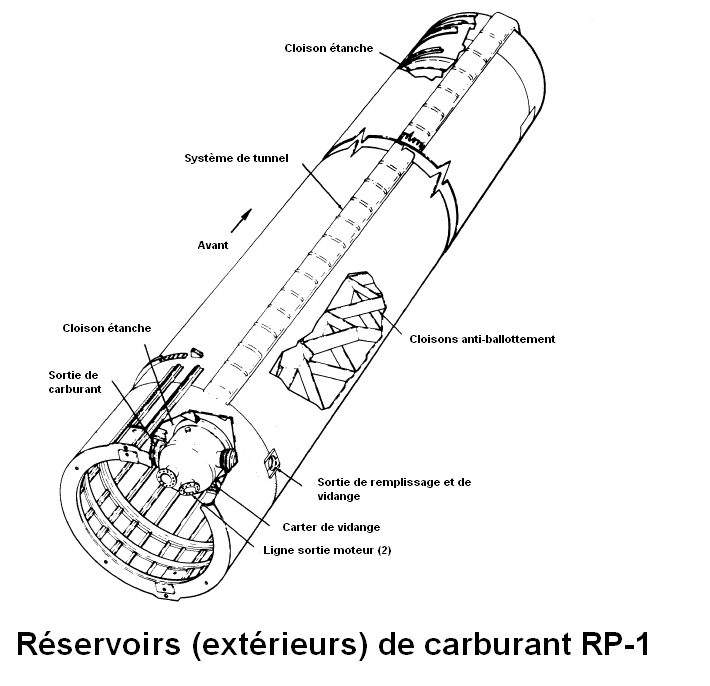
LES RÉSERVOIRS DE CARBURANT RP-1
Chacun des quatre réservoirs de carburant contient environ 25 % du carburant nécessaire pour l'étage S-I. Ces réservoirs sont des cylindres, avec des cloisons hémisphériques à l'arrière et des cloisons torisphériques à l'avant. Leur diamètre est de 1,77 m (70 in) et leur longueur atteint 16,56 m (652 in). À l'extrémité arrière, les réservoirs sont soutenus par les stabilisateurs de la structure de poussée, tandis qu'à l'avant, ils sont fixés au "spider beam" de l'adaptateur du deuxième étage. Chaque réservoir repose sur deux points de soutien diamétralement opposés sur les stabilisateurs. Ces points de soutien assurent la transmission des charges axiales et latérales. De même, le "spider beam" de l'adaptateur présente également deux points de soutien opposés pour chaque réservoir. Chaque point de soutien est constitué d'un joint à goupille coulissant, conçu pour résister aux charges latérales tout en prenant en compte l'expansion différentielle entre les réservoirs de carburant et les réservoirs de LOX dans la direction longitudinale.
La section cylindrique, fabriquée avec de l'alliage d'aluminium 5486, mesure 18,87 m (743 in) de long. Des cloisons étanches, en alliage d'aluminium 5086, sont encastrées aux extrémités avant et arrière du cylindre. Ces cloisons sont fixées au cylindre par des soudures circonférentielles. La cloison arrière est équipée de trois sorties : deux pour les conduites de moteur et une pour le collecteur de carburant. Le réservoir F-1 dispose également d'une sortie supplémentaire pour le remplissage et la vidange. La cloison avant comporte une sortie dédiée au collecteur de pression.
Au-dessus et en dessous du réservoir, dans les zones appelées jupes avant et arrière, des longerons sont fixés à la peau cylindrique. Ces longerons répartissent les charges concentrées reçues aux points de soutien du réservoir. La peau du réservoir présente des découpes pour les raccordements aux diverses sorties. Au-dessus des réservoirs F1 et F2 se trouvent des compartiments destinés à loger l'équipement électronique. À l'intérieur de la section cylindrique, des anneaux circulaires soudés soutiennent les cloisons anti-ballottement, réparties en six rangées verticales uniformément espacées autour du cylindre.
Le saviez vous ?? Les réservoirs extérieurs sont peints afin d'ajuster les conditions thermiques à l'intérieur de ces réservoirs et pour fournir un "motif de roulis", utilisé pour estimer le mouvement radial du lanceur pendant le vol.
LA VIDANGE D'UN DES RÉSERVOIRS LOX AUXILIAIRES EN VIDÉO
ADAPTATEUR DU SECOND ÉTAGE
Les charges sont transmises au deuxième étage via l'adaptateur du deuxième étage, qui comprend une "spider beam" (poutre araignée), des panneaux d'étanchéité, un carénage incliné à 45° et un carénage cylindrique.
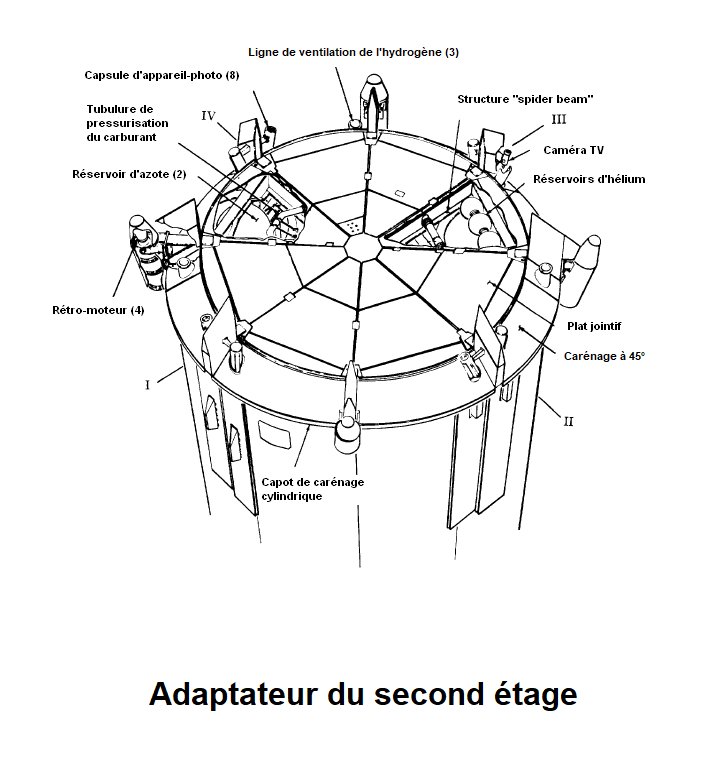
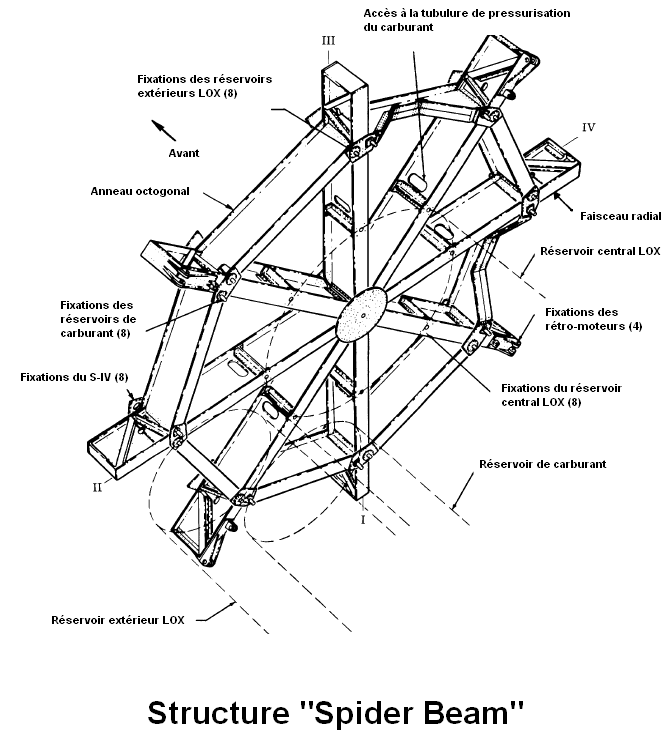
La "spider beam" soutient les réservoirs d'ergols à l'extrémité avant. Fabriqué en alliage d'aluminium 7075, elle se compose d'un anneau octogonal et de huit poutres radiales qui s'étendent vers l'intérieur depuis les sommets de l'octogone, toutes reliées au centre par des goussets plats. L'anneau octogonal et les poutres radiales sont des sections en I de de 0,50 m (20 in) de profondeur. Afin d'absorber les charges verticales, les poutres radiales sont renforcées au niveau des points d'appui des réservoirs d'ergols. La "spider beam" est fixée à l'étage S-IV par huit points de boulonnage.
Des panneaux d'étanchéité sont installés à l'avant de la "spider beam". Composés d'un sandwich en nid d'abeille, ces panneaux peuvent être partiellement retirés pour permettre l'accès au secteur avant des réservoirs d'ergols. Un carénage à 45° est fixé à la périphérie des panneaux d'étanchéité et aux extrémités des poutres radiales. Un carénage cylindrique est fixé à l'extrémité inférieure de la coiffe. La coiffe et le carénage assurent la protection la zone avant des réservoirs des charges aérodynamiques. Les sphères d'hélium et les rétromoteurs sont montés sur la "spider beam".
Un tunnel de systèmes est fixé à l'extérieur de chacun des quatre réservoirs de carburant. Chaque tunnel relie la section arrière à l'adaptateur du deuxième étage. Trois tunnels servent à protéger les câbles électriques, tandis que le quatrième sert au passage des conduites. Ces tunnels sont constitués de sections afin de faciliter leur retrait pour l'entretien et les réparations. Un carénage conique s’étend vers l’avant depuis les extrémités arrière des réservoirs d’ergol, assurant une transition aérodynamique entre ceux-ci et les panneaux de la coiffe avant de 6,85 m (270 pouces) de diamètre. L’extérieur du carénage est recouvert d’un isolant ablatif. Trois conduites de ventilation pour le refroidissement de l'hydrogène liquide (LH2) sont situées à l'extérieur du véhicule. Elles sont raccordées aux conduites de ventilation du LH2 de l'inter-étage arrière du S-IV. Dirigées vers l'arrière, elles sont acheminées à travers trois des ailerons de stabilisation.
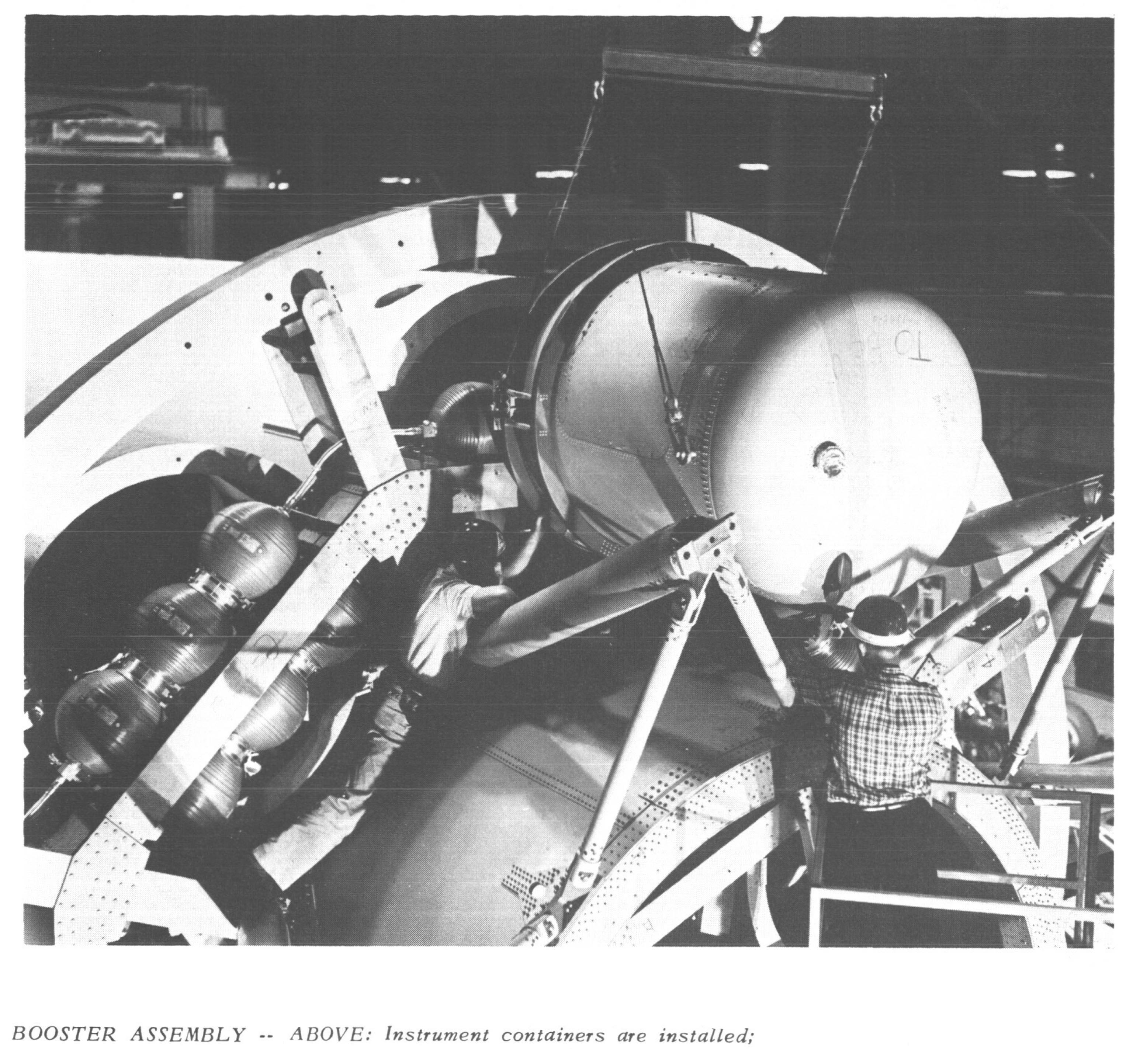
LES CONTENEURS À INSTRUMENTS DE LA SATURN I BLOCK I
Dans l'adaptateur avant de l'étage S-I, se trouvent des conteneurs à instruments, de forme approximativement cylindrique et pressurisés. Ils renferment des batteries, des équipements de mesure et de télémétrie, ainsi que le système de guidage. Ces conteneurs présentent une certaine analogie avec l'unité à instruments (IU) introduite sur les véhicules Block II, puis adoptée sur les Saturn IB et Saturn V. Leur nombre et leur contenu varient légèrement en fonction des missions.
 Un technicien travaille au branchement de l'appareillage dans un des conteneur |
 Dans les dessins au trait, on pourrait croire que ces conteneurs sont relativement petits... Cependant comme tout le reste associé au programme Saturn, ils sont plutôt grands |
 Travaux sur les différents câblages Les 3 captures sont tirées du film de la NASA "Saturn - A Giant Thrust into Space" de 1962 |
 Montage d'un des quatre conteneurs pressurisés |
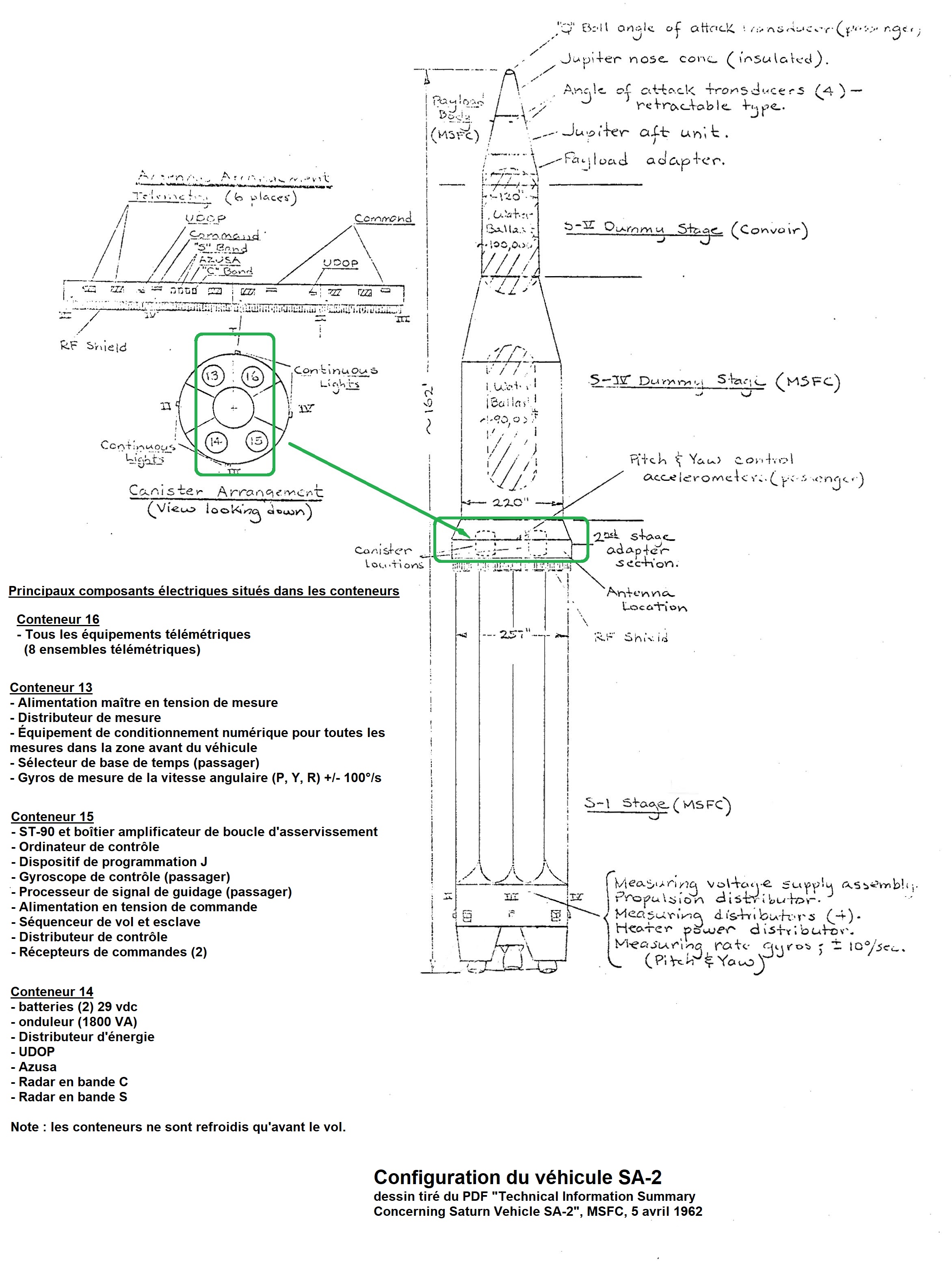 Localisation des conteneurs |
 L'étage S-I au complet avec les quatre conteneurs pressurisés dédiés au transport de l'avionique |
Comment fonctionne le système de guidage et de contrôle ??
Le lanceur Saturn est contrôlé par l’orientation de ses moteurs. Quatre des huit moteurs H-1 de l’étage S-I peuvent pivoter de ±7° grâce à des actionneurs. [Un système similaire d'actionneurs déplaçe les six moteurs RL-10 de l'étage S-IV de ±4°]. Ces actionneurs reçoivent leurs instructions du Flight Control Computer, un calculateur analogique qui, à partir du vol SA-5, convertira les données de l’ordinateur de guidage numérique et des capteurs en commandes pour les actionneurs. L’ordinateur de guidage déterminera les corrections d’attitude nécessaires en analysant les informations fournies par les capteurs inertiels montés sur la plate-forme stabilisée ST-90.
Pour les premiers véhicules, la trajectoire est déterminée par un dispositif de came mécanique de fabrication allemande, tandis que pour les versions plus récentes, elle est définie par un programme chargé dans l'ordinateur de guidage. Le système de guidage de base repose ainsi sur trois éléments principaux : un programme spécifiant la trajectoire cible (défini soit par la came mécanique, soit par un programme informatique), de capteurs mesurant l'orientation et la vitesse du véhicule, et un ordinateur numérique chargé de résoudre l'équation de guidage afin de calculer les corrections d'attitude nécessaires pour suivre la trajectoire prévue. Le système de contrôle comprend quant à lui des capteurs d'angle d'attaque, des capteurs de taux d'attitude, des accéléromètres de contrôle, un calculateur analogique de contrôle de vol et des actionneurs permettant d’orienter les moteurs pour ajuster la trajectoire.
Développement du système
Les lignes chronologiques dans le tableau ci-dessous montrent l'évolution du système de guidage et de contrôle depuis le SA-1 jusqu'à sa version finale du SA-10. Les principaux thèmes de développement sont les suivants :
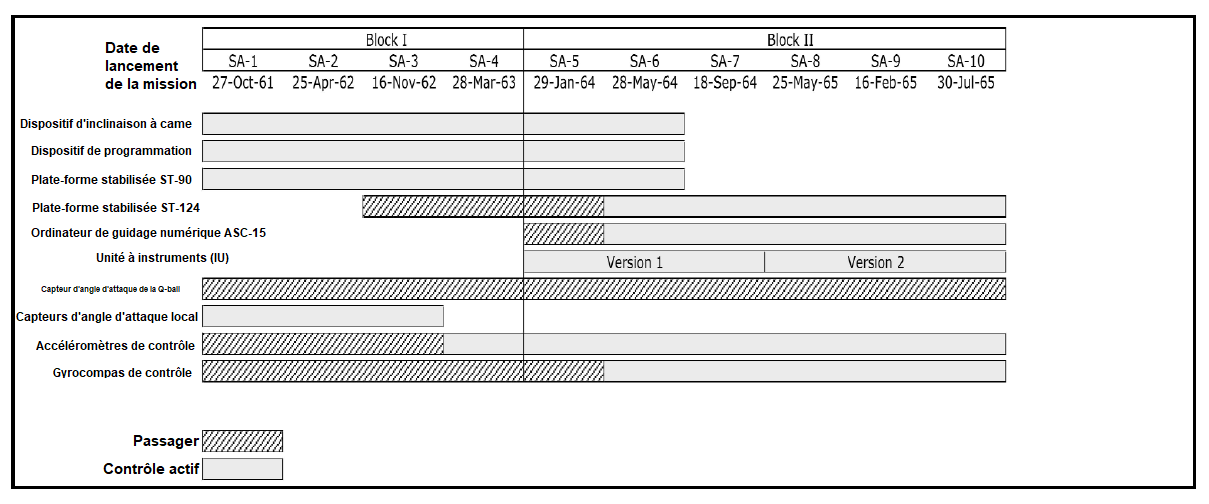
Passager versus actif :
Certains composants sont initialement embarqués sur Saturn I en tant que passagers, c'est-à-dire qu'ils n'interviennent pas dans le pilotage du lanceur et se limitent à la collecte de données télémétriques pour analyse au sol. Lors de missions ultérieures, certains de ces composants deviennent actifs, fournissant directement des données au système de contrôle et de guidage.
Programme d'inclinaison (tangage) :
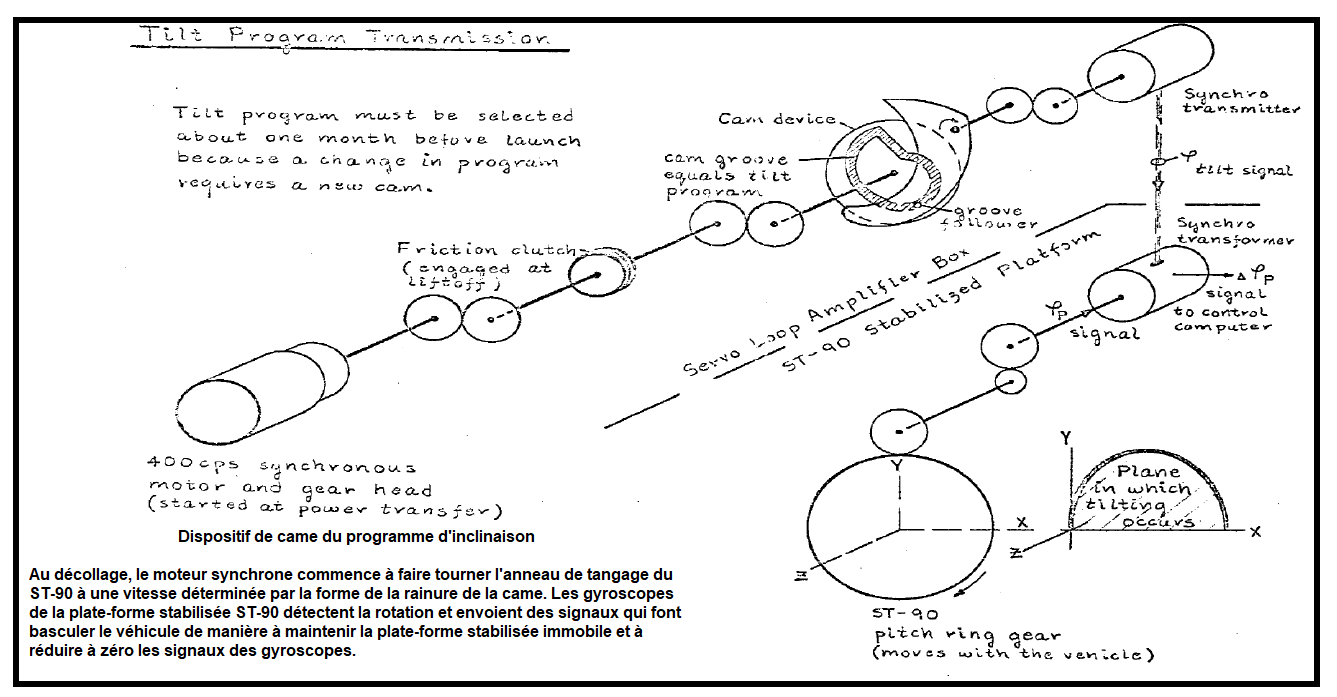
Toutes les Saturn suivent une trajectoire définie uniquement en fonction du temps, durant la traversée de l'atmosphère, période où les forces aérodynamiques sont les plus intenses. Le tangage des premiers véhicules est contrôlé par un dispositif à came, dont la forme constitue le programme d'inclinaison. Sur les premiers véhicules, l'inclinaison (tangage) est régie par un dispositif à came dont la forme encode le programme d'inclinaison. Sur les versions plus récentes, ce programme est intégré dans l’ordinateur de guidage numérique sous forme d’une série de coefficients polynomiaux. Durant cette première phase de vol, les capteurs de guidage se contentent de transmettre des données au sol sans influencer la trajectoire du lanceur.
Programme de roulis :
Les véhicules Block I ne disposent pas de programme de roulis, bien qu'un roulis involontaire puisse se produire en raison de légers déséquilibres de poussée. En revanche, les véhicules Block II, qui décollent depuis un complexe de lancement différent (LC-37), doivent effectuer une manœuvre de roulis après le décollage afin de s'aligner sur l’azimut de mission.
L'ordinateur (ou calculateur) de guidage numérique :
Initialement embarqué en tant que passager sur les vols SA-5 et SA-6, l’ordinateur de guidage numérique remplacera progressivement le dispositif à came (utilisé pour le programme d'inclinaison) ainsi que le dispositif à programmes (chargé du séquencement des événements de vol). Il permettra la mise en place d’un guidage actif à partir du deuxième étage du SA-6, et sur toutes les missions suivantes. À partir de la mission SA-7, il prendra également en charge un programme combiné de roulis et d’inclinaison. (voir page sur le S-IV)
Plate-forme stabilisée :
La plate-forme stabilisée ST-90, dérivée de la ST-80 utilisée sur les missiles Redstone et fabriquée par la Ford Instrument Company, est employée sur les missions SA-1 à SA-6. À partir de la mission SA-7, elle sera remplacée par la plate-forme ST-124, spécialement conçue pour les missions lunaires.
Capteurs de contrôle :
Sur les trois premières missions, les données utilisées pour le contrôle du véhicule proviennent de capteurs mesurant l’angle d’attaque. À partir de la quatrième mission, ces capteurs sont remplacés par des accéléromètres, fournissant des données plus précises pour le contrôle du lanceur.
Unité à instruments :
Sur les véhicules Block I, les capteurs de guidage et de contrôle sont logés dans quatre conteneurs pressurisés situés à l’avant de l’étage S-I. Avec les véhicules Block II, ces capteurs seront intégrés dans un nouvel étage spécifique : l’unité à instruments (IU), empilée au sommet de l’étage S-IV. Les missions SA-5, SA-6 et SA-7 transporteront la première version de l’IU, tandis que les missions SA-8, SA-9 et SA-10 utiliseront une version améliorée.
(voir page consacrée au S-IV)
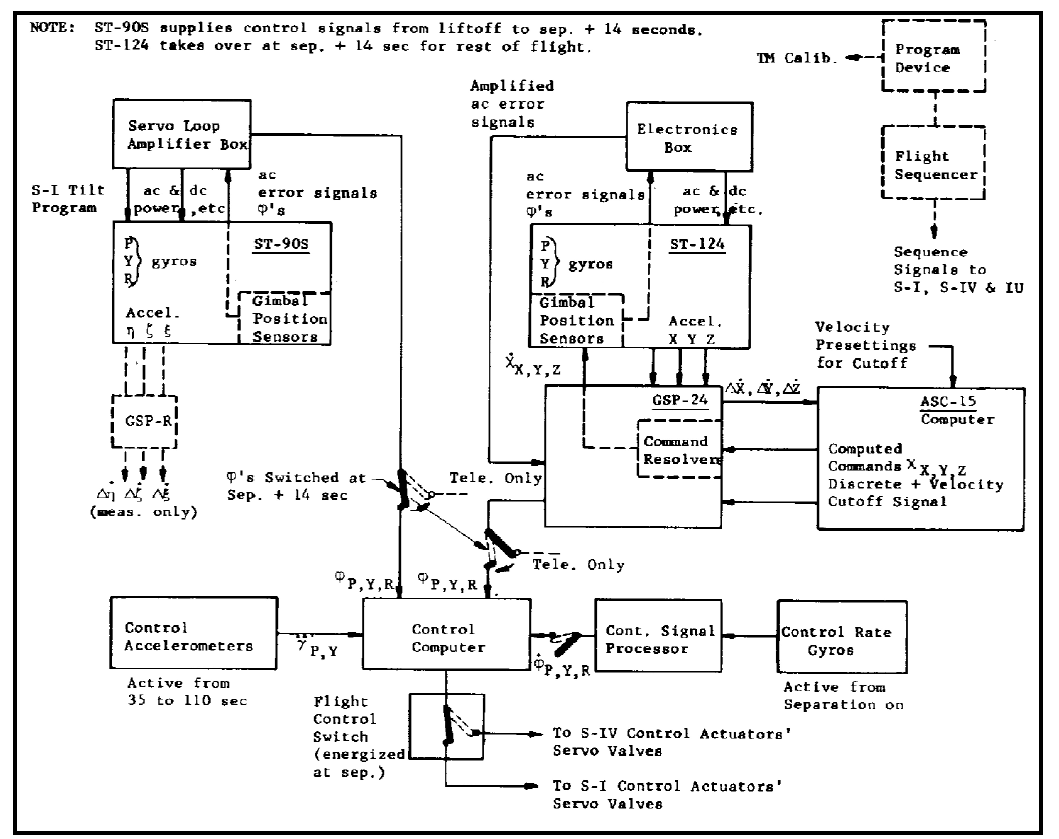
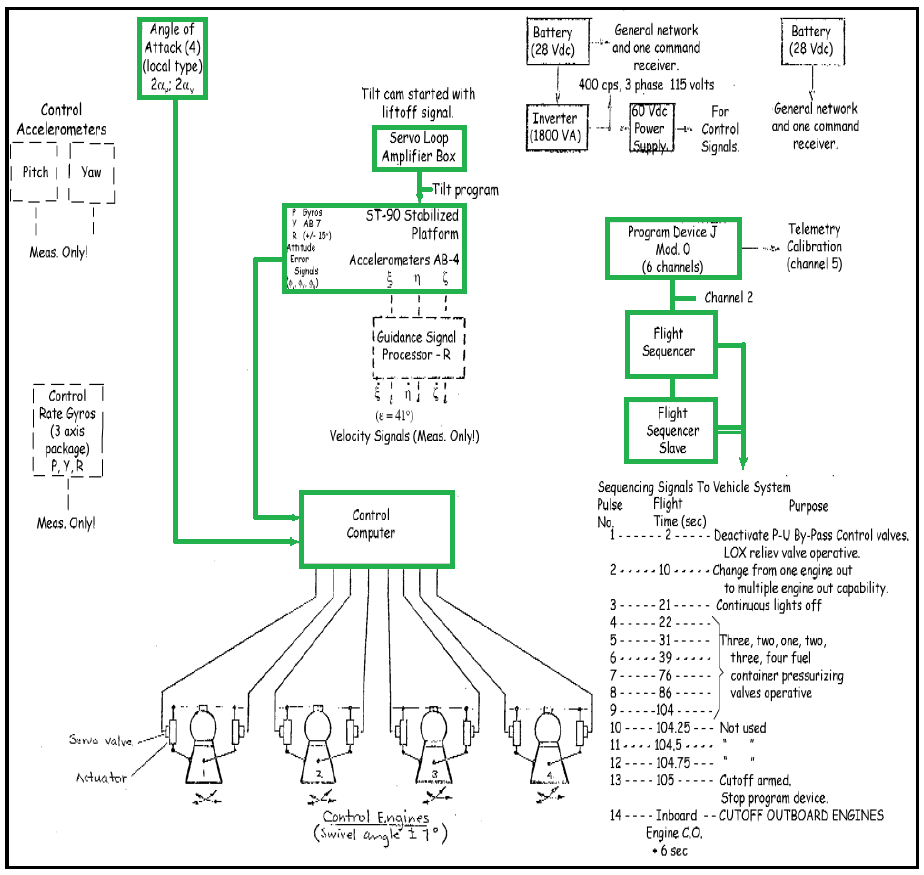 En vert, les composants principaux actif du système de guidage et de contrôle du vol SA-2. Il s'agit essentiellement du même système que celui utilisé sur les vols SA-1 et SA-3. Les cases avec des lignes en pointillé et l'inscription "Meas. Only !" indiquent les composants transportés en tant que passagers |
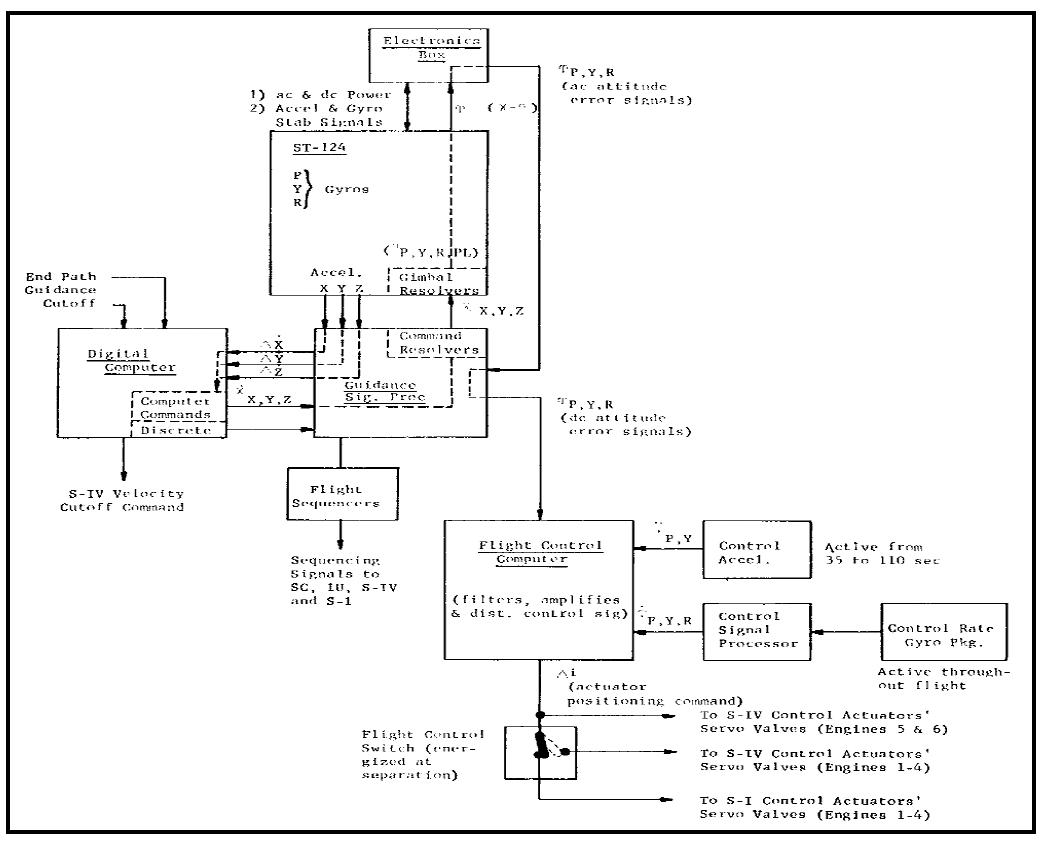
 Système de guidage et de contrôle du vol SA-6. Le système de gauche contrôle le 1er étage, et le système de droite contrôle le reste de la mission |
 Système de guidage et de contrôle du vol SA-7. Identique au système de guidage du deuxième étage utilisé sur le SA-6 : pas de dispositif de programmation, de plate-forme stabilisée ST-90 ou de came d'inclinaison |
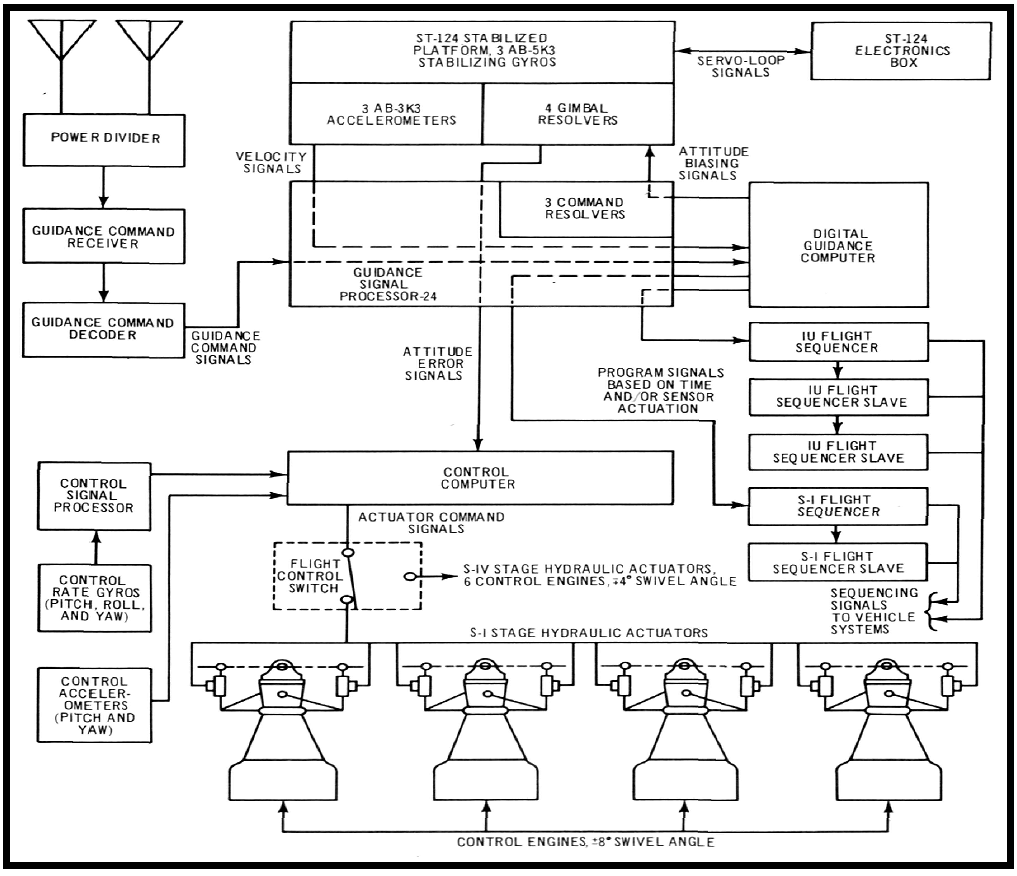 Système de guidage et de contrôle pour les vols SA-8, -9 et -10 |
LE SYSTÈME DE CONTRÔLE
Le système de contrôle surveille en permanence les écarts entre l’attitude réelle du lanceur et celle spécifiée par le système de guidage (tangage, roulis et lacet). Lorsqu’une déviation est détectée, il ajuste l’orientation de la poussée pour compenser l’écart et maintenir la trajectoire prévue. Sur le Saturn I Block I, une instabilité est présente durant une partie du vol, car le centre de pression des forces aérodynamiques est situé en avant du centre de masse du lanceur. Une légère augmentation de l’angle d’attaque, causée par des perturbations comme le vent, entraîne un couple aérodynamique qui accentue encore cette déviation, risquant de provoquer un basculement incontrôlé du véhicule. Pour la version Block II, des ailerons sont ajoutés à la base du premier étage afin de reculer le centre de pression derrière le centre de masse durant la première minute de vol, améliorant ainsi la stabilité aérodynamique. Toutefois, un contrôle actif demeure indispensable et est utilisé tout au long de la mission pour assurer la correction des perturbations.
L'ordinateur de contrôle de vol (Flight Control Computer)
L'ordinateur de contrôle de vol intégré aux lanceurs est un calculateur entièrement analogique. Il traite les données provenant de divers capteurs, dont la nature et le nombre varient en fonction des exigences spécifiques de chaque mission.
Lors des trois premières missions, les données des capteurs de l'angle d'attaque, situés dans le cône de nez, sont combinées avec celles fournies par la plate-forme stabilisée ST-90 pour le contrôle de l'attitude du lanceur.
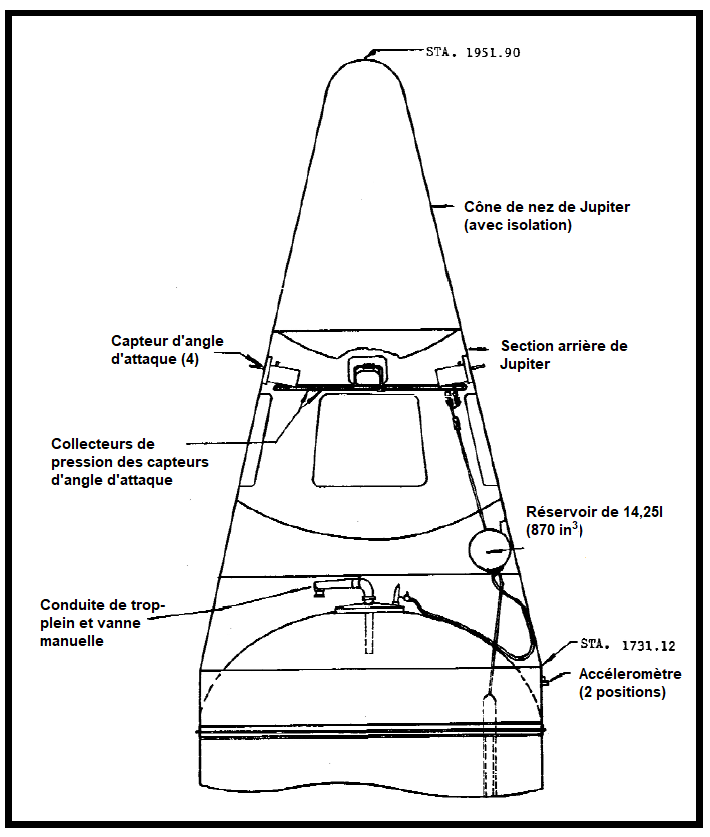 Cône de nez avec emplacements des différents capteurs, dont les capteurs locaux d'angle d'attaque. Ces capteurs contrôlaient les vols des SA-1, -2 et -3 |
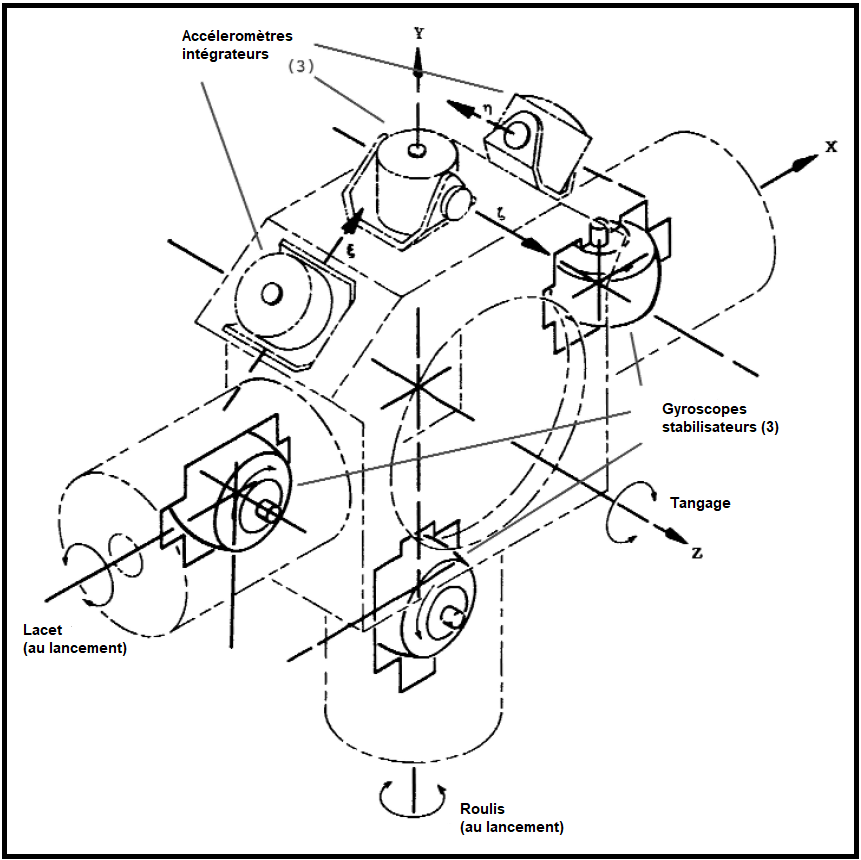 Systèmes de coordonnées inertielles dans la plate-forme stabilisée ST-90. Dans la ST-90, les accéléromètres de la plate-forme stabilisée mesurent les accélérations dans le système ξ, η, ζ, qui est tourné d'un angle ε par rapport au système X, Y, Z. Pour le SA-1, ε = 41°. Dans la plate-forme ST-124, les accéléromètres mesurent les accélérations dans le même système X, Y, Z que la plate-forme stabilisée. Le système de cardan de la ST-124 est "externe". C'est-à-dire que le cardan extérieur est fixé au véhicule. Dans la ST-90, le cardan le plus à l'intérieur est fixé au véhicule, un arrangement appelé "interne" |
À partir de la mission SA-4, des accéléromètres de contrôle remplacent les capteurs d'angle d'attaque. Les informations sur le taux d'attitude sont obtenues en différenciant électriquement les trois signaux d'attitude dans l'ordinateur de contrôle de vol, à l'aide de réseaux R-C. Cet ordinateur filtre, amplifie et/ou atténue, met en forme et additionne ces signaux puis génère des commandes d'orientation destinées aux huit actionneurs hydrauliques permettant ainsi de positionner correctement les quatre moteurs extérieurs H-1 pour le contrôle du véhicule en tangage, lacet et roulis.
Le ballottement des ergols dans l'étage S-I est atténué par les cloisons anti-ballottement de manière à ce qu'il n'impacte pas de façon significative le système de commande. Les effets des premier et deuxième modes de flexion sur le système de commande sont supprimées par la mise en forme de la phase et/ou l'atténuation de ces fréquences ( ~ 2 à ~ 4 cps) et ( ~ 6 à ~ 12 cps) dans l'ordinateur de contrôle de vol.
Le saviez vous ? L'angle d'attaque est l'angle formé entre l'axe longitudinal du véhicule et la direction de l'écoulement de l'air qui le précède.
Pour les vols SA-1 à -3, l'ordinateur de contrôle calcul l'angle de pivotement des moteurs à l'aide de l'équation suivante :
β = a0*φ+ a1*dφ/dt +b0*α où
β est l'angle de pivotement,
φ est l'erreur d'angle d'attitude du véhicule déterminé par le système de guidage,
α est l'angle d'attaque, et a0, a1, et b0 sont des gains dont les valeurs varient pendant le vol.
L'erreur de cap φ est fournie par la plate-forme stabilisée ST-90.
Le taux d'erreur de cap dφ/dt est calculé dans l'ordinateur de contrôle à l'aide de réseaux de résistances et de condensateurs.
À partir du SA-4, l'ordinateur de contrôle utilise les accélérations latérales mesurées par des accéléromètres fixés sur le corps du véhicule, au lieu de l'angle d'attaque. L'équation de contrôle devient alors :
β = a0*φ+ a1*dφ/dt +g2*d²γ/dt² où d²γ/dt² est l'accélération du véhicule perpendiculaire à son axe longitudinal et g2 est un gain.
Les analyses de stabilité de la rétroaction de contrôle, ainsi qu'une condition mathématique appelée principe du minimum de dérive (DMP pour Drift Minimum Principle) sont utilisées pour calculer les gains du système de contôle. Le DMP permet au véhicule de se diriger légèrement vers le vent, en réduisant l'angle d'attaque d'environ 50 %. Cela permet à la composante latérale de la poussée du moteur à cardan de compenser exactement la force aérodynamique latérale. Outre les gains, qui déterminent la variation de l'amplitude des signaux des capteurs, l'ordinateur de commande introduit un déphasage essentiel pour assurer la stabilité. La phase appropriée a été théoriquement déterminée en modélisant les circuits électriques du système de contrôle, les composants mécaniques (tels que les actionneurs et les cardans du moteur) et les vibrations de la structure du véhicule. Ce système fonctionne en boucle fermée et peut soit converger vers l'orientation spécifiée par l'ordinateur de guidage, soit diverger si les gains et la phase sont incorrects. Dans ce cas, le système de contrôle peut sur-corriger les vents ou d'autres perturbations aléatoires, entraînant des oscillations qui pourraient endommager le véhicule. Pour maintenir la stabilité du système, les signaux des capteurs passent par des réseaux de mise en forme de la phase dans l'ordinateur de contrôle. Les gains varient tout au long de la mission et d'une mission à l'autre. Des potentiomètres et des résistances, commutés par des relais dans l'ordinateur de contrôle déterminent ces gains (a0, a1, et b0 ou g2). Un moteur synchrone fait tourner une came qui qui ajuste les potentiomètres. La forme des rainures de la came et les moments où le moteur est activé ou désactivé déterminent comment les gains varient. Lors du vol SA-2, pendant les 25 premières secondes, le contrôle du véhicule était uniquement basé sur les signaux émis par la plate-forme stabilisée ST-90. Après cette période, le gain du signal d'angle d'attaque a augmenté jusqu'à un maximum entre 50 et 70 s, puis a diminué à nouveau jusqu'à zéro et 90 s.Le capteur d'angle d'attaque était utilisé pendant la phase de forte pression dynamique, mais a été jugé peu fiable après environ 105 s en raison de la faible pression dynamique. D'autres missions ont présenté des profils de gain similaires.
Le lanceur Saturn possède des axes de roulis, de lacet et de tangage définis respectivement par les axes X, Y et Z comme le montre la figure ci-dessous à gauche. L'attitude de roulis préférée se trouve dans les positions I et III sur un plan vertical, la position I pointant vers le bas en direction de la Terre lorsque le véhicule est horizontal en orbite. L'axe Z passe par la position I (également appelée Fin I dans le Block II), et à l'aire de lancement 34, il est orienté à environ 100° 12 min à l'est du nord. À partir du LC-37B, l'axe Z pointe à environ 90° 12 min à l'est du nord. L'axe Y est perpendiculaire aux axes X et Z et est orienté horizontalement au moment du lancement, pointant approximativement vers le sud. Les moteurs du lanceur sont inclinés de manière à ce que leur poussée passe prés du centre de gravité du véhicule, ce qui réduit la tendance à la rotation causée par une panne de moteur ou un déséquilibre de la poussée. En raison de l'orientation du LC 34, les véhicules BlocK I peuvent être lancés sans manœuvre de roulis, bien qu'un léger roulis incontrôlé ait été observé à cause du déséquilibre de la poussée. Les missions Block II, qui décollent d'un complexe de lancement différent (le LC 37) , doivent effectuer une manœuvre de roulis après le décollage pour obtenir l'azimut correct.
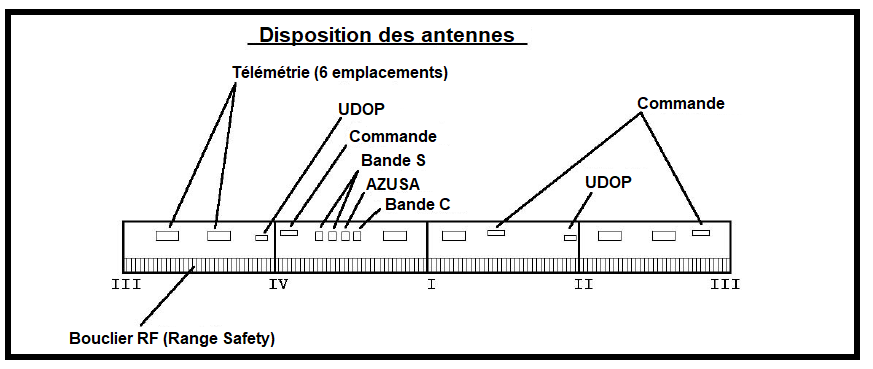
La figure ci-dessous à droite montre que cette manœuvre permet d'orienter les antennes en bande S, AZUSA et C vers le bas, en direction des stations de poursuite au sol avec lesquelles elles doivent communiquer. Les positions I, II, III et IV de la figure à droite sont les mêmes que celles de la figure à gauche.
 Exemple relevé du vol SA-2 |
 Configuration des antennes du vol SA-2 |
Guidage du Block I
Les systèmes de guidage et de contrôle des véhicules Block I (SA-1 à -4) sont simplifiés, car ces missions sont suborbitales. Les azimuts sont fixés par la configuration de la plateforme de lancement et le lanceur ne comporte qu'un seul étage propulsé (S-I), les deuxième et troisième étages étant des maquettes. Ces systèmes sont principalement une adaptation, avec quelques modifications mineures, de composants du missile balistique Jupiter (PGM-19) et du lanceur Juno II, afin de répondre aux exigences de précision, taille et masse pour ce nouveau vecteur.
Aucun ordinateur de guidage n'est utilisé pour les Saturn I Block I (missions SA-1, 2, 3 et 4). Comme pour tous les lancements de Saturn, la première phase du vol, lorsque les forces aérodynamiques sont les plus importantes, suit une trajectoire prédéfinie, conçue pour minimiser les forces latérales. La programmation d'inclinaison (ou tangage) du véhicule est assurée par la forme d'une rainure dans un dispositif à came, situé dans le boîtier de l'amplificateur de la boucle d'asservissement, qui contient le programme d'inclinaison présélectionné [les véhicules ultérieurs intégreront un programme d'inclinaison dans l'ordinateur de guidage numérique sous la forme d'un ensemble de coefficients d'une série de puissance]. Durant cette première phase de vol, les capteurs de guidage ne font que télétransmettre des données au sol sans influencer la trajectoire du véhicule. La séquence des événements du vol est contrôlée par un dispositif de programmation, également utilisé sur les missiles Jupiter. Ce dispositif est un magnétophone à 6 pistes qui envoie des impulsions à un ensemble de relais (le séquenceur de vol) pour activer et désactiver differents circuits dans une séquence programmée de manière précise.
Du matériel avancé, tel que la plate-forme ST-124 et le système de guidage numérique, sera introduit progressivement dans le système à mesure de l'avancement du programme. L'objectif du système de guidage est de fournir un système universel capable de répondre à diverses exigences de mission imposées au véhicule pour atteindre les objectifs de la charge utile. Ce concept de guidage adaptatif sera conçu pour répondre à une variété d'exigences avec un minimum de modifications. Le cœur de ce système de guidage adaptatif est un ordinateur numérique à grande vitesse, qui répondre aux normes de fiabilité élevées du lanceur Saturn tout en offrant la flexibilité nécessaire pour diverses missions. (voir page consacrée au S-IV)
Les étages supérieurs du lanceur Block I reflétent la configuration à trois étages du véhicule Saturn I. Le ballast des étages supérieurs factices est principalement constitué d'eau. Il a été déterminé que l'eau ne survivrait pas à la rentrée atmosphérique, ce qui a permis d'ajouter un facteur de sécurité lors des essais.
Fun Fact : les étages S-IV et S-V factices sont annotés S-IVD ou S-VD, le D signifie "Dummy" (factice).
Texte de Paul Cultrera, tous droits réservés. Sources, PDF : "Saturn I Summary" ; "Apollo Systems description Volume II Saturn launch vehicle" (1 february 1964) ; "Saturn" prepared by George C. Marshall Space Flight Center (TMX 57337) ; "Summary of base thermal environment measurement on the Saturn I Block I flight vehicles" By Ira P. Jones_ Jr.Aero-Astrodynamlcs Laboratory (septembre 1965) ; "Technical Information Summary Concerning SATURN Vehicle SA-2" (April 5, 1962) ; "QUEST The history of spaceflight quaterly" volume 17, number 4 (2010) Edgar Durbin.