L'ÉTAGE S-IV DU LANCEUR SATURN I BLOCK II
![]()
L'étage S-IV constitue le deuxième étage du lanceur Saturn I Block II. Sa structure mesure environ 12,62 m (497 in ou 41,4 ft) de long pour un diamètre de 5,58 m (220 in ou 18,3 ft). Il est composé de plusieurs éléments structurellement assemblés : un inter-étage arrière, une jupe arrière, une structure de poussée, une protection thermique, deux réservoirs à fond commun pour les ergols et une jupe avant.
RAPIDE DESCRIPTIF
Interétage arrière : Les charges de poussé du premier étage sont transmises à l'étage S-IV par l'interétage arrière (S-I/S-IV). Il s'agit d'un cylindre d'environ 4,67 m (184 in) de long, constitué de huit panneaux cylindriques d'un segment de 45°chacun, assemblés par des épissures longitudinales. Ces panneaux adoptent une structure sandwich en nid d'abeilles avec une face en alliage d'aluminium 7075 collés sur un noyau en alliage d'aluminium 5052. Ils sont amovibles afin de faciliter l’accès aux équipements internes pour la maintenance. Trois lignes d'évacuation d'hydrogène sont fixées à l’extérieur de la structure. L’interétage arrière assure une répartition homogène des charges sur la jupe arrière.
 Montage de l'interétage arrière du S-IV |
 |
La jupe arrière : Elle mesure approximativement 1,21m (48 in) de long et est composée de huit panneaux cylindriques segmentés à 45°, reliés entre eux des épissures longitudinales. Ces panneaux sont fabriqués selon une construction sandwich en nid d'abeilles, avec une face en alliage d'aluminium 7075 collée sur un noyau en alliage d'aluminium 5052. La jupe est soudée au réservoir d'hydrogène liquide au point de tangence de la cloison étanche arrière. Elle et l'interétage arrière sont fixés à l'aide de boulons explosifs. Lors de l'activation des boulons, ceux-ci permettent la séparation de l'étage S-IV du premier étage. Quatre moteurs d'ouillage, accompagnés de leurs carénages, sont installés sur l'extérieur de la jupe arrière.
Les moteurs RL10 : voir la page consacrée.
La structure de poussée : Elle assure la transmission des charges de poussée des moteurs au réservoir de LOX (oxygène liquide). Fabriquée en alliage d'aluminium 7075, la structure est une virole conique avec les dimensions approximatives suivantes : un diamètre arrière de 2,48 m (98 in), un diamètre avant de 4,31 m (170 in) et une longueur de 1,52 m (60 in). La pente du revêtement est tangente à l'interface de la cloison étanche arrière du réservoir de LOX. Les six moteurs sont montés sur un diamètre de 2,33 m (92 in) et inclinés à 6 degrés par rapport à la ligne centrale du véhicule.
Le revêtement (la peau) et les lisses sont soutenus par un anneau arrière, deux anneaux intermédiaires internes, et un anneau avant. Les charges latérales sont transmises par cisaillement à l'anneau arrière dans le revêtement de la structure de poussée. Les charges axiales sont transmises de l'anneau arrière vers les faisceaux de poussée et les lisses longitudinales externes de section en chapeau, avant d'être dirigées vers l'anneau avant. Cet anneau avant est fixé sur une surface usinée de la cloison étanche arrière du réservoir d'oxygène liquide. Les charges reçues par l'anneau avant sont ensuite réparties vers la cloison étanche arrière du réservoir de LOX.
Le bouclier thermique de base : Il protège la zone de propulsion avant des chaleurs générées par le moteur. Il est situé à environ 1,21 m (48 in) derrière le plan de cardan du moteur et soutenu par la structure de poussée. Ce bouclier thermique est un panneau isolant en construction sandwich à nid d'abeilles. Des découpes dans le panneau, scellées par des rideaux flexibles attachés aux moteurs et au bouclier thermique, permettent de libérer l’action du cardan du moteur.
Le réservoir d'oxygène liquide : L'oxygène liquide de l'étage S-IV est contenu dans un réservoir en alliage d'aluminium 2014. Il est formé par deux cloisons, l’une arrière et l’autre commune, reliées par deux anneaux. La cloison étanche arrière, un hémisphère de rayon sphérique 2,79 m (110 in), est assemblée à partir de six quartiers et d'une pièce maitresse circulaire, soudé ensemble. Elle est conçue pour supporter les charges de pressurisation et les charges de propergol induites par l’accélération.
L'autre cloison étanche, dite cloison étanche commune, est ainsi nommée car elle sépare les réservoirs de LOX et de LH2. Il s’agit d’un segment sphérique de rayon 2,79 m (110 in), construit en structure sandwich à nid d’abeilles : ses faces externe et interne en alliage d’aluminium 2014 sont collées sur un noyau en fibre de verre. Cette configuration assure une isolation thermique suffisante pour empêcher le gel de l’oxygène liquide pendant 12 heures. Deux anneaux de compression, soudés à la périphérie de la cloison commune, la fixent à la cloison arrière par des soudures et des attaches mécaniques. Une surface fraisée sur la cloison arrière sert d’interface de montage à la structure de poussée. Les charges de poussée des moteurs sont transmises par cette surface à la cloison arrière, puis à la section cylindrique du réservoir d’hydrogène liquide.Pour limiter le ballottement de l’oxygène liquide, des anneaux plats en alliage d’aluminium sont installés dans le réservoir. Ils sont soutenus par un cône tronqué en tôle fixé à la cloison arrière, au niveau de son joint avec la cloison commune. Un trou d’homme au centre de la cloison arrière permet l’accès au réservoir. Huit sorties sont disposées dans le carter de vidange au fond de cette cloison : six pour les lignes d’alimentation LOX des moteurs et deux pour les lignes de passage. Un système anti-vortex, intégré à la cloison arrière au-dessus des sorties moteurs, retarde la formation de vortex pendant la vidange.
EN VIDÉO (prise de l'intérieur)...
Le réservoir d'hydrogène : L'hydrogène liquide de l'étage S-IV est contenu dans un réservoir en alliage d'aluminium 2014, d'une longueur d'environ 6,52 m (257 in). Il est constitué d'une section cylindrique fermée à l'avant par une cloison étanche hémisphérique,et à l'arrière par la cloison étanche commune avec le réservoir d'oxygène liquide. Le fond avant et la cloison étanche arrière du réservoir d'oxygène liquide sont soudés à la section cylindrique. La cloison étanche comporte trois ouvertures : une pour l'accès au réservoir et deux pour le passage des conduites d'alimentation en hydrogène. La section cylindrique de ce réservoir LH2 est conçue pour supporter les charges de pressurisation et de propergol liées à l'accélération, ainsi que les charges externes du vol. Elle est composée de trois segments cylindriques de 120° chacun mesurant 2,79 m (110 in) de long. La surface interne de chaque segment est entièrement gaufrée, avec des raidisseurs usinés dans la masse pour assurer la rigidité structurelle.
Excepté la cloison étanche commune, toutes les surfaces intérieures du réservoir liquide d'hydrogène sont isolées avec de la mousse de polyuréthane. Collée aux parois du réservoir, cette isolation limite l'ébullition de l'hydrogène durant les opérations de lancement et en vol.
Le réservoir LH2 transmet les charges à la jupe avant via un joint de soudure sur le fond avant. Six sorties LH2 destinées aux moteurs sont équipées d'écrans anti-vortex, positionnés en amont de la cloison arrière commune.
La jupe avant : La jupe avant (ou inter-étages avant) assure la transmission des charges du réservoir d’hydrogène liquide LH2 à l’unité d’instrumentation. Il s’agit d’un cône tronqué d’environ 3,30 m (130 in) de long, avec un diamètre arrière de 5,43 m (214 in) et un diamètre avant de 3,91 m (154 in). Sa pente est tangente à la cloison étanche du réservoir LH2 à l'interface arrière. Une trappe d’accès est aménagée dans la jupe avant pour permettre l’entretien des équipements embarqués. Des ouvertures sont également prévues pour le passage de la ligne d’alimentation en hydrogène, ainsi que pour le passage des antennes de télémétrie et des antennes de sécurité de gamme. Enfin, des supports destinés à l’installation éventuelle de deux rétro-moteurs sont situées sur la jupe avant.
L'UNITÉ À INSTRUMENTS (IU) DE SATURN I BLOCK II
Cette structure assure la transmission des charges entre l’étage S-IV et la charge utile. Fabriquée en alliage d’aluminium, elle mesure 3,91 m (154 in) de diamètre et 0,86 m (34 in) de hauteur. Les charges axiales ainsi que les moments de flexion sont repris par les lisses longitudinales internes, tandis que la charge en cisaillement est supportée par le revêtement. En plus de sa fonction structurelle, cette section accueille également le système de guidage du lanceur.
Les vols SA-5, -6 et -7 utilisaient la première version de l’unité d’instrumentation (IU), tandis que les vols SA-8, SA-9 et SA-10 employaient la seconde version.
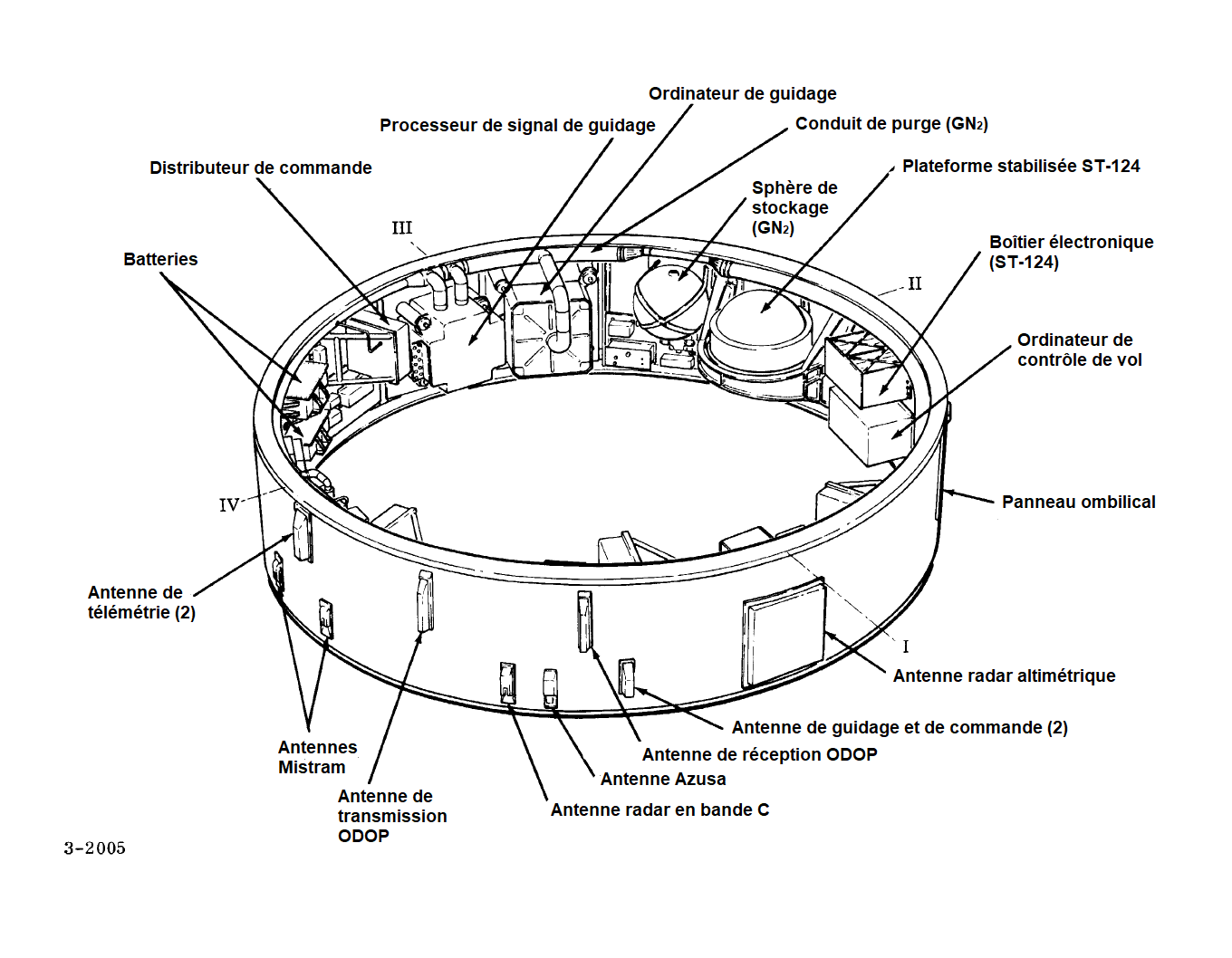
 IU première version |
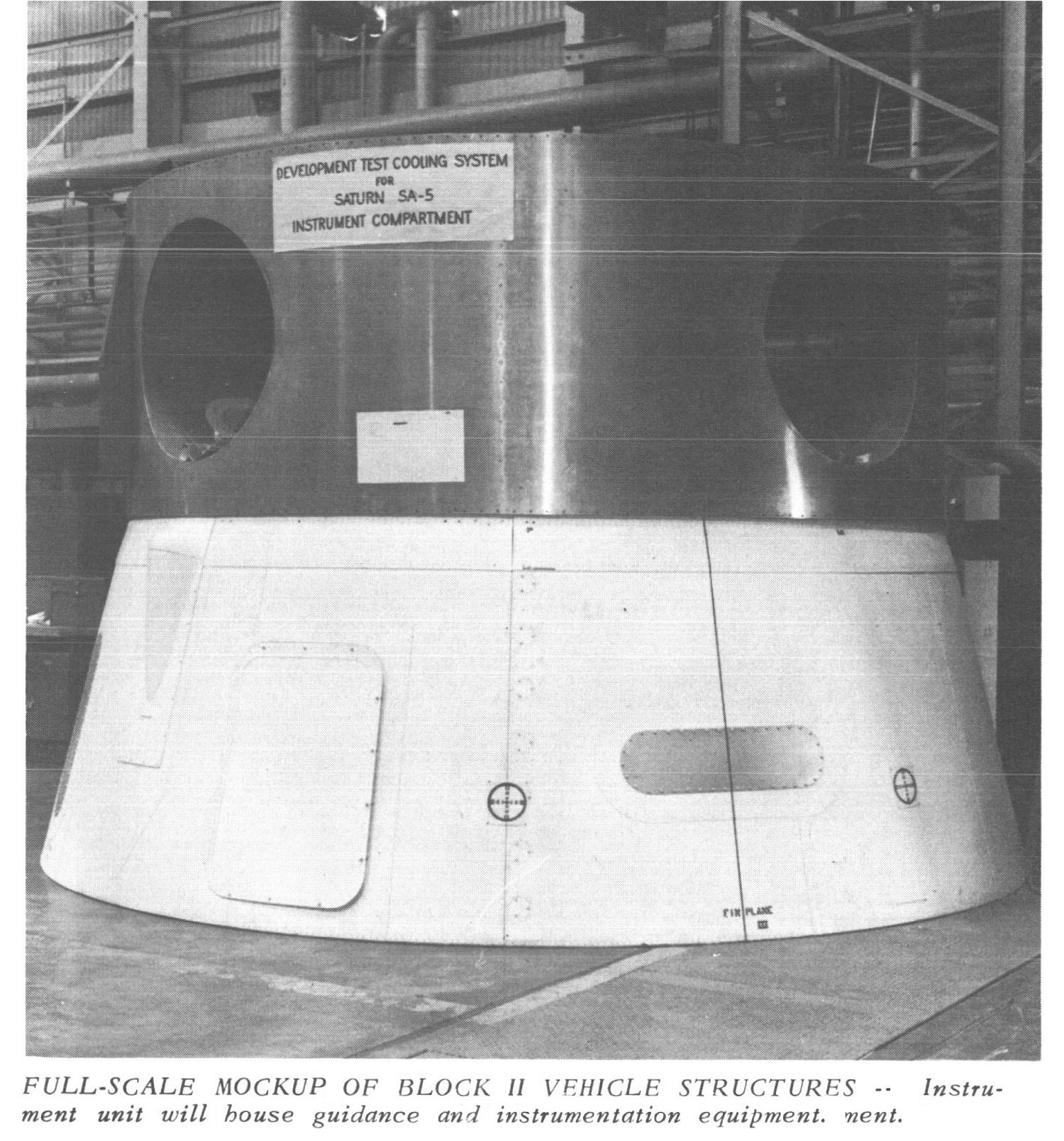 Photo de la maquette de l'IU première version (test du système de refroidissement) |
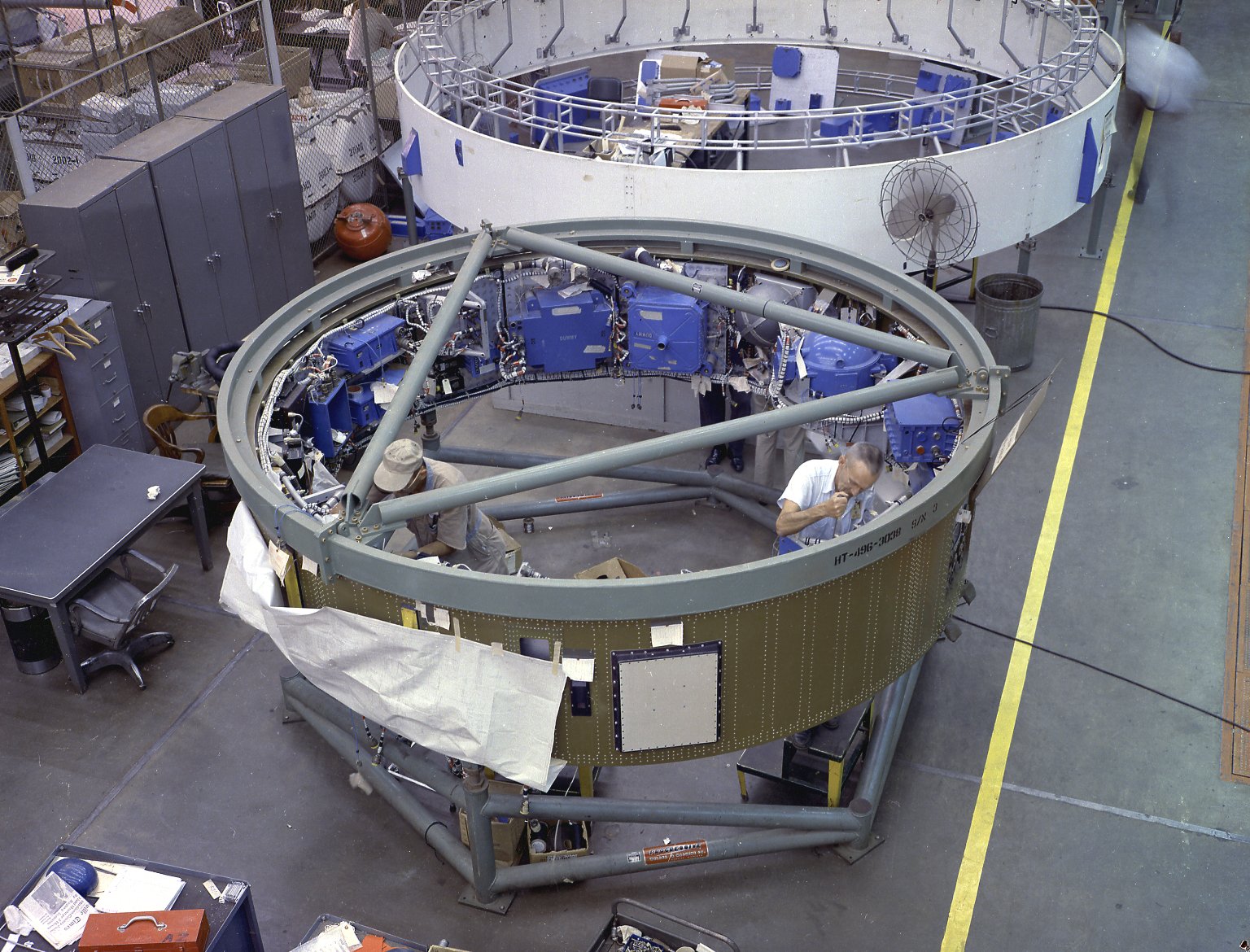 Montage de l'IU seconde version avec, à l'arrière plan la structure l'IU des futurs Saturn Ib |
L'orientation du LC-37 impose aux véhicules Block II d'effectuer une manœuvre de roulis avant de s'incliner dans le plan orbital. L'ampleur du roulis dépend de l'azimut de lancement, lui même en fonction de l'heure de lancement. La trajectoire du lanceur se situe dans un plan contenant le centre de la Terre, le site de lancement et la position de la Lune au moment de l'insertion sur l'orbite terrestre. Toute autre inclinaison orbitale nécessiterait des manœuvres coûteuses en carburant. Durant le compte à rebours, ce plan se déplace en raison du mouvement de la Lune. Ainsi, la manœuvre de roulis et l'azimut de lancement varient en fonction du temps de lancement.
Le système d'alignement azimutal externe ajuste en continu l'orientation de la plate-forme stabilisée afin de maintenir son axe ξ dirigé vers l'azimut de lancement. Le dispositif de programmation, un lecteur de bande multipiste de précision contenant la séquence des événements, s'active au décollage. Après un délai permettant au lanceur de dégager la tour de lancement, il ordonne au séquenceur de vol de fermer la boucle d'asservissement, initiant ainsi la manœuvre de roulis. Celle-ci s'interrompt lorsque la plate-forme stabilisée signale que l'azimut de vol est atteint. Peu après, le dispositif de programmation déclenche l'engagement du dispositif de came d'inclinaison.
Pour le SA-5 et le premier étage du SA-6, ces manœuvres étaient contrôlées par des dispositifs mécaniques. À partir du SA-7, un ordinateur de guidage numérique a remplacé le dispositif de programmation et le système à came d'inclinaison. Dès lors, les manœuvres de roulis et d'inclinaison sont effectuées simultanément plutôt que séquentiellement. Le roulis s'effectue dans les 30 premières secondes de vol, tandis que l'angle de tangage augmente progressivement jusqu'à l'insertion en orbite. L'inclinaison est calculée par l'évaluation d'un polynôme, permettant d'adapter facilement le programme entre les missions en modifiant les coefficients de calcul. À l’inverse, la reprogrammation du dispositif d'inclinaison mécanique nécessitait un mois, car une nouvelle came devait être usinée pour chaque mission.
L'ordinateur de vol numérique rend possible le guidage actif : le guidage dépend des conditions de vol, et pas seulement du temps. Les équations de guidage sont résolues une fois par seconde, et l'attitude optimale du véhicule est envoyée à l'ordinateur de commande du vol pour créer des commandes pour les actionneurs du moteur. Le roulis, le lacet et le tangage nécessitent des solutions de guidage distinctes.
Une fois l'assiette de roulis correcte obtenue, le système de commande de vol la maintient fixe. Aucun calcul de guidage n'est nécessaire pour le roulis, car la valeur correcte est déterminée au moment du lancement et reste constante pendant le reste de la mission. Le véhicule effectue un mouvement de lacet lorsqu'il pointe hors du plan de l'orbite. Le lacet varie peu par rapport à zéro et utilise le mode de guidage le plus simple, appelé guidage delta minimum. L'équation de direction pour le lacet est une fonction linéaire du déplacement par rapport au plan de l'orbite et de la dérivée temporelle de ce déplacement.
Le véhicule tangue lorsqu'il pivote dans le plan de l'orbite de la verticale vers l'horizon. Le tangage varie davantage que le lacet ou le roulis, et la détermination du tangage optimal est un problème plus difficile. Le premier système de guidage en tangage utilisé sur Saturn I était le mode de guidage polynomial (PGM), utilisé pour le deuxième étage de SA-6 et pour l'ensemble du vol motorisé de SA-7. Un schéma amélioré, le mode de guidage itératif ou IGM, a été utilisé pour le reste des missions Saturn I, IB et V. Le PGM et l'IGM sont tous deux des exemples de guidage adaptatif.
La première partie d'une mission Saturn vole en boucle ouverte, sans guidage actif, afin de réduire les forces aérodynamiques pendant la traversée de la majeure partie de l'atmosphère. Le système de guidage détermine l'attitude souhaitée en utilisant uniquement le temps écoulé depuis le lancement. Il ne tient pas compte des variations de poussée, du vent ou d'autres perturbations. Le guidage actif commence après l'allumage du deuxième étage (S-IV), environ 165-168 secondes après le décollage. À ce moment-là, l'altitude du véhicule est d'environ 90 km, bien au-dessus du point de pression dynamique maximale situé à 11-12 km. Bien que la position à l'allumage du premier étage soit connue, en raison des variations des conditions de vol pendant la combustion du premier étage, le point où le guidage actif commence peut se situer n'importe où dans un volume d'espace considérable. Une famille de trajectoires à consommation minimale de carburant est calculée dans les mois précédant le lancement. Ces trajectoires commençent en différents points de ce volume, avec diverses valeurs de vitesse et d'attitude.
Une trajectoire optimale, avec des points de départ et d'arrivée donnés, peut être déterminée en utilisant le calcul des variations avec un gros ordinateur numérique et beaucoup de temps. L'ordinateur numérique de bord ne pouvant pas utiliser les techniques de calcul des variations, les résultats des calculs effectués au sol sont résumés par une approximation polynomiale de l'angle de braquage optimal. Les coefficients du polynôme sont obtenus par analyse de régression de l'ensemble des trajectoires optimales. Les variables du polynôme correspondent aux quantités mesurées par les dispositifs embarqués : position, vitesse et accélération. Le polynôme est de la troisième puissance et comporte environ 35 termes. Ces polynômes, l'un pour le tangage et l'autre pour l'angle de braquage en lacet, sont évalués une fois par seconde, avec des valeurs actualisées de position, de vitesse et d'accélération.
Ce système de guidage, appelé PGM, n'est utilisé que sur les lanceurs SA-6 et SA-7.
Un schéma amélioré, IGM, a été testé pour la première fois sur SA-9, affiné sur SA-8 et SA-10, et utilisé sur tous les lancements Saturn ultérieurs. La dérivation des équations de guidage IGM commence par des hypothèses simplificatrices d'une Terre plate et d'un champ de gravité constant. Cela permet d'obtenir une solution analytique aux équations de guidage, qui peut être évaluée à bord. L'utilisation itérative de cette solution (une fois par seconde) permet d'obtenir une approximation très précise d'une trajectoire optimale (consommation minimale de carburant).
Les avantages de l'IGM par rapport au guidage polynomial sont les suivants :
1) Réduction des calculs avant le vol. Le nombre de trajectoires considérées est réduit de deux ordres de grandeur. Cela présente un autre avantage :
2) Une plus grande flexibilité. Moins de calculs avant le vol peuvent être effectués plus rapidement, ce qui permet de s'adapter plus facilement aux nouvelles conditions de la mission.
3) Une plus grande précision et donc une meilleure économie de carburant.
L'ASC-15
L'ordinateur de guidage ASC-15 effectue son premier vol sur SA-5, qui est également le premier lanceur Saturn I Block II et le premier à atteindre l'orbite.Lors de cette mission, l'ASC-15 vole en tant que passager, ne guidant pas le véhicule, mais générant des données d'essai et assurant les transmissions télémétriques vers le sol pour une évaluation ultérieure. Le système de guidage actif de SA-5 était similaire à celui des vols précédents. L'ensemble passager comprend l'ASC-15 et la plate-forme inertielle ST-124. Le guidage est en boucle ouverte, ce qui signifie que les commandes de guidage dépendent uniquement du temps. Ce vol marque également l'introduction de la première version de l'unité à instruments.
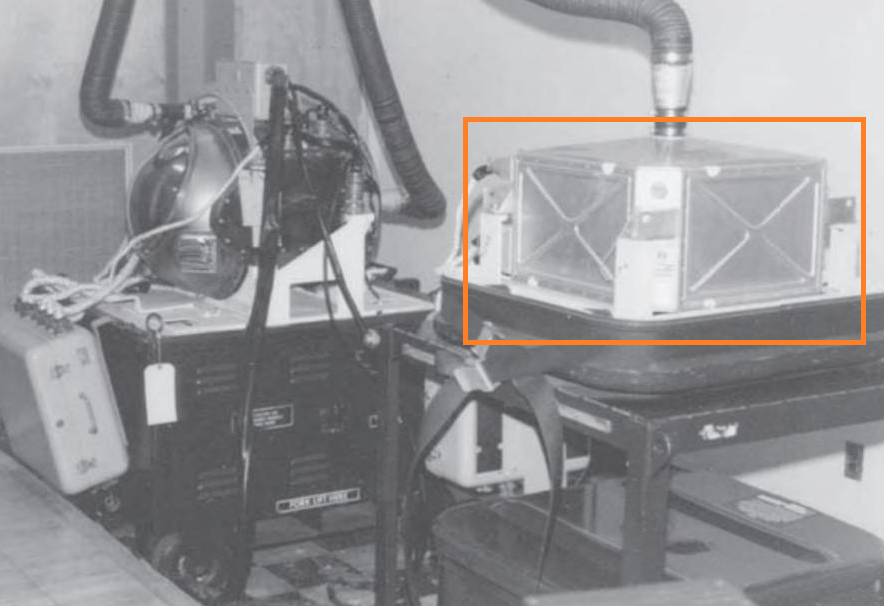 Test d'un ASC-15 couplé avec l'unité inertielle MX-6362/DJW-11E (surnommée Gold Ball) d'un missile Titan II |
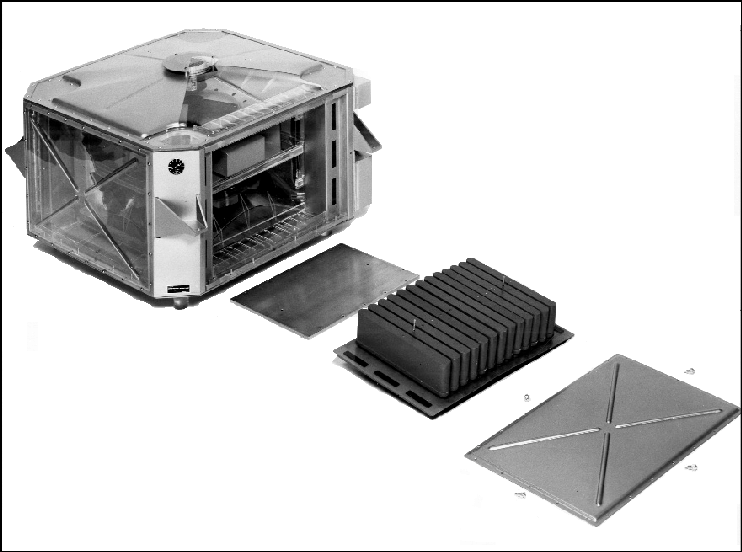 L'ASC-15 en partie démonté, l'un des quatre panneaux latéraux est retiré (voir ci-dessus à droite), révélant 13 des 52 modules logiques (Photo d'IBM Corporate Archives) |
Cet ordinateur, initialement utilisé sur le Titan II, a ensuite été adapté par la NASA pour servir d'ordinateur de guidage numérique sur le Saturn I Block II. Il s'agit d'un ordinateur numérique binaire à mémoire à tambour. La structure de base de l'ordinateur est le châssis, divisé en deux sections : le châssis extérieur et le châssis intérieur. Le châssis extérieur est composé de quatre poteaux d'angle en aluminium, soudés et séparés par des rails en aluminium, formant ainsi une structure en forme de boîte. Quatre capots latéraux identiques, ainsi qu'un capot inférieur et supérieur, donnent à l'ASC-15 (initialement appelé Missile Guidance Computer ou MGC) son apparence. Ces capots sont de couleur vert émeraude et sont constitués de plastique laminé recouvert d'une feuille d'aluminium plaquée or. L'orifice situé au centre de la partie supérieure permet le passage de l'air de refroidissement. Les capots sont légèrement convexes et dotés de nervures pour une meilleure rigidité. La feuille d'aluminium sert de blindage contre les interférences radio et est recouverte d'une pellicule plastique protectrice. Les quatre capots latéraux supportent un total de cinquante-deux modules logiques, chacun contenant quatre modules encapsulés soudés [Welded Encapsulated Modules ou WEM], composés de composants discrets tel que des résistances, des transistors, des condensateurs, des relais, etc.
Les quatre côtés de l'ordinateur sont identifiés comme le nord, le sud, l'est et l'ouest, avec le mur nord étant celui qui présente des connexions électriques externes. Des plaques froides sont utilisées pour diriger l'air réfrigéré et les puits de chaleur, complétant ainsi les parois du châssis extérieur. Le châssis intérieur ou cloche, est enfermé par les parois du châssis extérieur et supporte les panneaux d'entrée et de sortie des modules ainsi que les alimentations (régulateurs et convertisseurs). À l'intérieur de la cloche se trouve le boîtier du tambour magnétique, qui entoure et protège davantage le tambour magnétique.
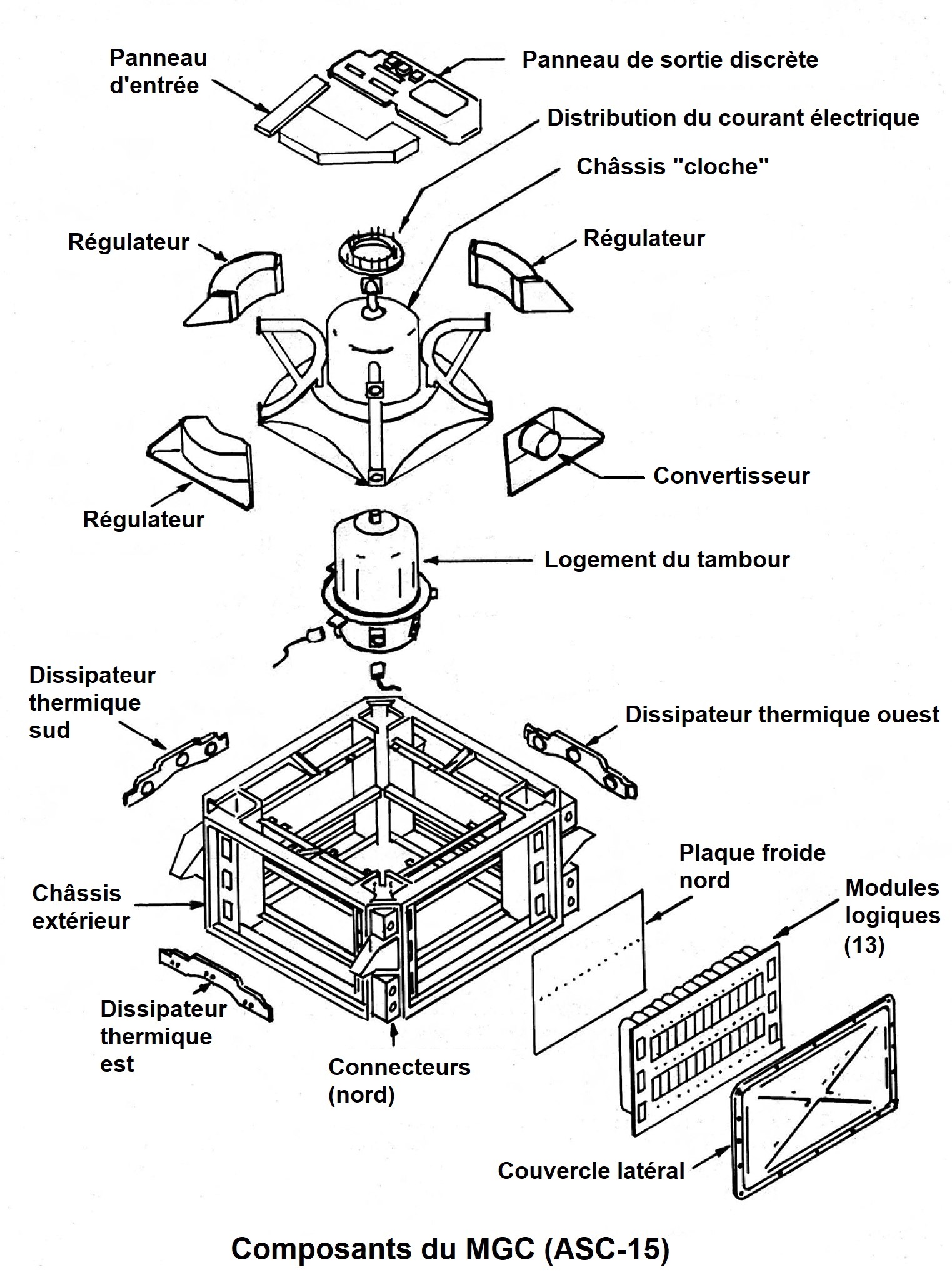 Vue éclaté de l'ASC-15 |
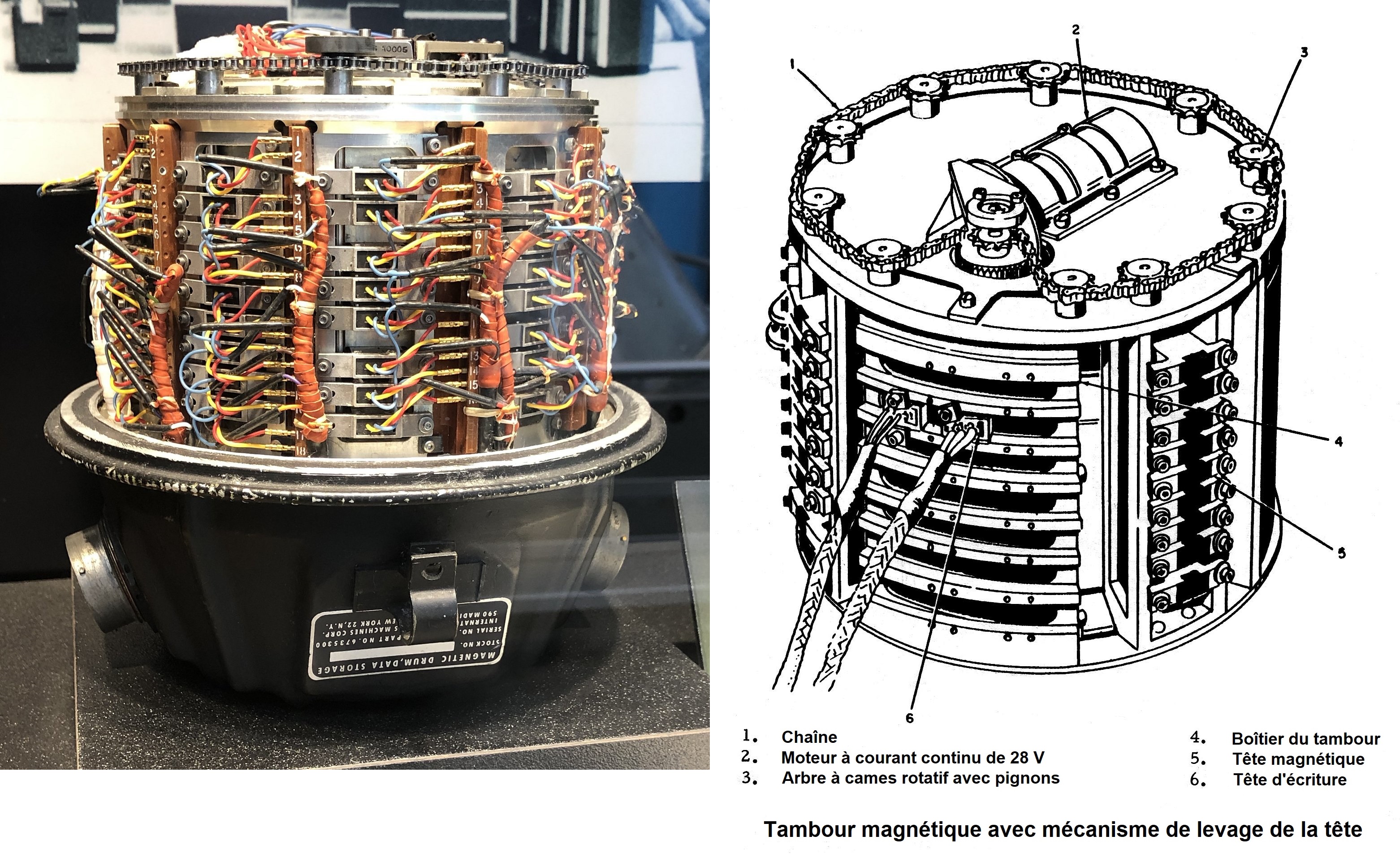 Mémoire à tambour magnétique (Drum memory) |
Mémoire à tambour magnétique
le tambour magnétique est la première mémoire cinétique magnétique fiable, avec une capacité relativement importante (allant de 100Ko à quelques Mo) et un temps d'accès court pour l'époque, utilisée dans les ordinateurs au début des années 1950. Il sert à la fois de mémoire principale et de mémoire de masse, stockant à la fois les programmes et les données.
Le tambour magnétique se compose de plusieurs éléments : un rotor, un stator, des têtes de lecture, des têtes d'écriture, un mécanisme de levée des têtes, un moteur électrique, et un cadre de support intégré dans le boîtier du tambour, le tout étant hermétiquement scellé. Le rotor est un cylindre en acier inoxydable à parois minces, recouvert d'un alliage magnétique de nickel-cobalt. Les pièces d'extrémité et l'arbre du rotor supportent l'armature du moteur synchrone de 400 CPS (400 hertz). Le stator du moteur est logé dans l'extrémité inférieure du boitier du tambour. À l'extrémité supérieure, on trouve les mécanismes de levée de tête, constitués d'arbres à cames rotatifs avec pignons et une petite chaîne entraînée par un moteur à courant continu de 28 volts. Ce mécanisme sert à lever et abaisser les têtes de lecture et d'écriture. Lors de la mise hors tension, un moteur de 28 volt à courant continu entraîne un ensemble d'engrenages et de chaînes qui déplacent des cames pour éloigner les têtes du tambour, évitant ainsi tout risque de rayure. Pendant le fonctionnement normal, ces têtes sont maintenues à distance du tambour grâce à la couche d'air générée par la vitesse de rotation du tambour. Lorsque le tambour atteint sa vitesse de rotation normale, le moteur de levée des têtes réaligne lentement les têtes.
Les 80 têtes magnétiques sont réparties autour du tambour, en adéquation avec 58 des 70 pistes totales. Soixante-sept de ces têtes sont des têtes de lecture, et treize sont des têtes d'écriture. Les 12 pistes restantes sont utilisées en tant que pistes de rechange. Le tambour mesure 7,62 cm (3 in) de long et 11,43 cm (4,5 in) de diamètre permettant de stocker 100 224 bits binaires sur les 58 pistes utilisées. Une piste se compose de 64 mots, chacun étant comprenant 27 bits. Chaque piste fait le tour complet du tambour et a une largeur de 1,09 mm (0,043 in). Au total, cette mémoire contient 3712 mots.
Sur SA-6, bien que le système de guidage en boucle ouverte ST-90S soit utilisé pour le premier étage (S-I), après la séparation, le ST-124 et l'ASC-15 utilisent un système de guidage adaptatif (en boucle fermée) pour contrôler le deuxième étage (S-IV). L'efficacité du guidage adaptatif a été accidentellement démontrée lors d'une situation où l'arrêt prématuré du moteur S-IV numéro huit n'a presque eu aucun impact sur la trajectoire du véhicule. Sur SA-7, le système ST-124 gère la mise à feu des deux étages. L'ordinateur numérique ASC-15 remplace à la fois le dispositif à cames qui contrôlait le programme d'inclinaison S-I pour les missions précédentes, ainsi que le dispositif de programme qui régulait la séquence des événements lors de ces missions.
Sources : PDF "Saturn..." TMX57337 ; Saturn I Block II Guidance Summary Report by R. A. Chapman Aero-Astrodynamics Laboratory ; student study guide OBR1821F/312F-V-1 thru 4 Missile launch/Missile officer (LGM-25) "Missile Systems" ; "QUEST The history of spaceflight quaterly" volume 17, number 4 (2010) Edgar Durbin. Texte de Paul Cultrera, tous droits réservés.