GUIDAGE, NAVIGATION ET CONTRÔLE
![]()
"Naviguer, c’est choisir sa destination, mais surtout comment y parvenir. Naviguer, c’est aussi déterminer en permanence sa position et s’orienter pour poursuivre sa route dans la bonne direction." (le rédacteur)
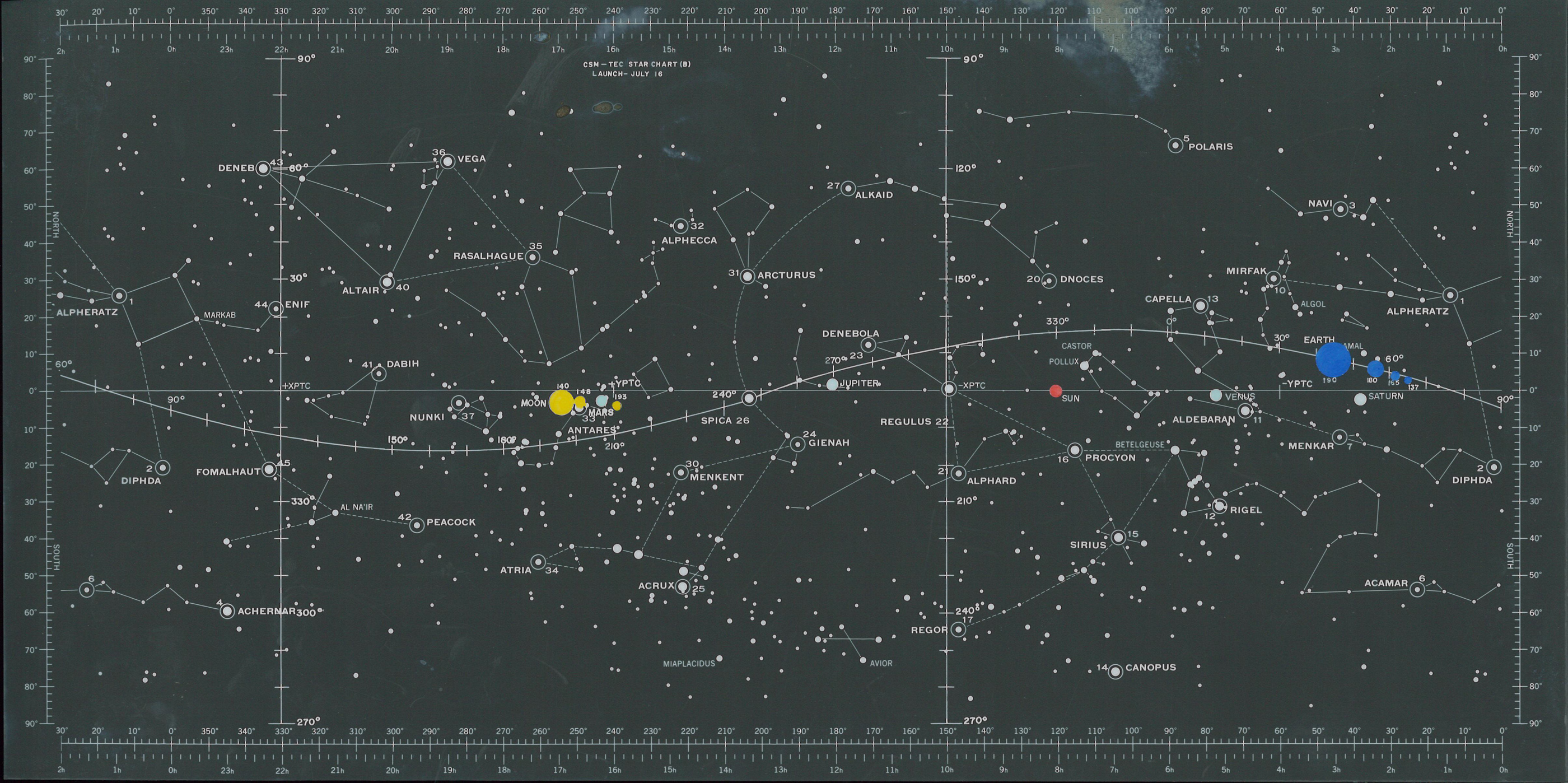
PETIT RAPPEL, QUI A SON IMPORTANCE.. Comme tout le monde le sait, dans une mission Apollo tout est planifié, calculé, programmé et enregistré (des mois auparavant) dans les moindres détails par les ordinateurs au sol qui mèneront la navigation jusqu'à quelques mètres du posé sur le sol sélène. C'est le centre de calcul au sol avec ses ordinateurs qui se charge de tout, jusque dans les moindres détails. Ce sont eux qui dirigent le vaisseau une fois la TLI (Trans Lunar Injection) réalisée par le vecteur Saturn V. Le vaisseau Apollo n'est qu'un périphérique de ce centre de calcul et son point fort en est la liaison radio/com avec la plus grande bande passante possible (en UHF/SHF). |
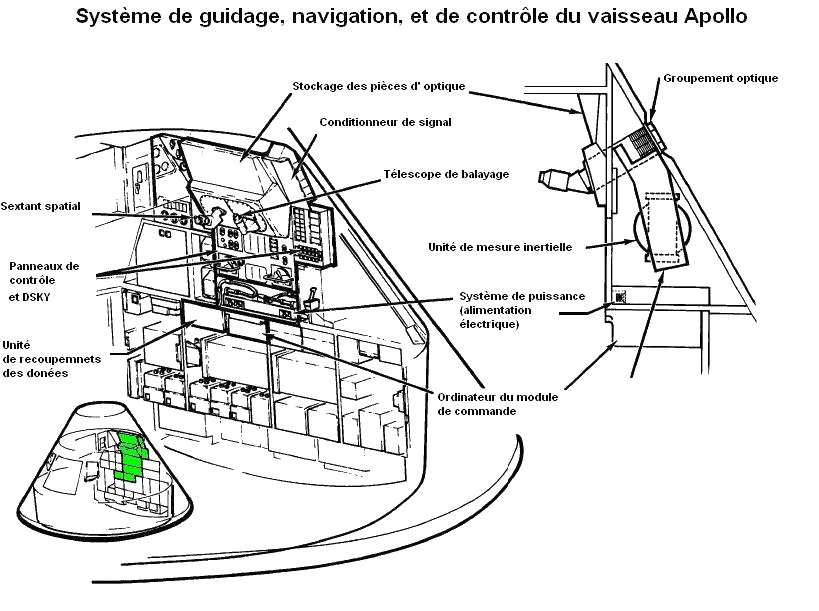
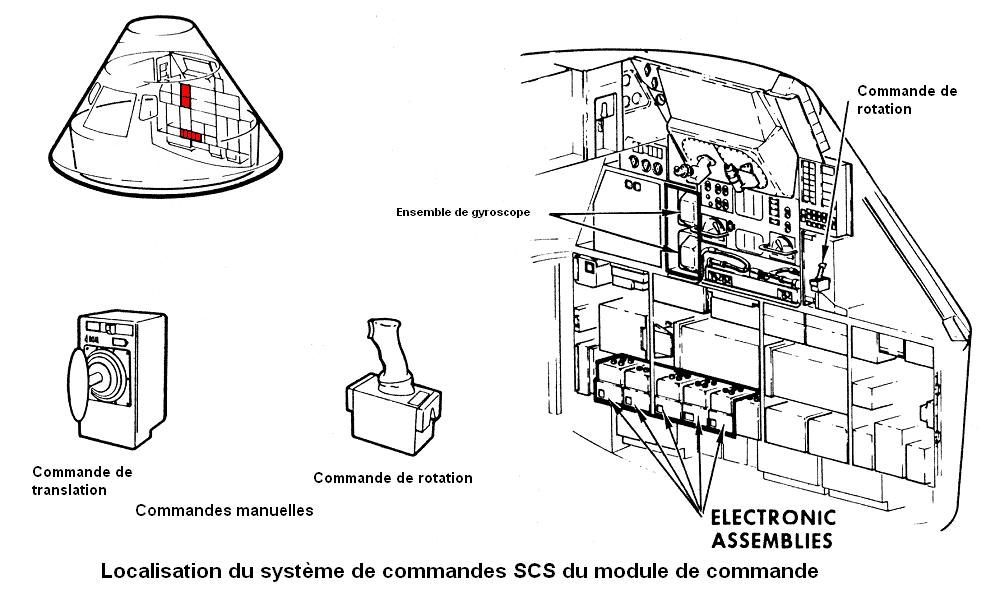
Le vaisseau spatial Apollo est guidé et contrôlé par deux sous-systèmes interdépendants. Le premier est le système primaire de guidage, de navigation et de contrôle. L'autre est le sous-système de stabilisation et de contrôle (SCS). Les deux sous-systèmes fournissent des informations sur la rotation, la trajectoire de vol et la vitesse. Ils intègrent et interprètent ces informations et les convertissent en commandes pour les sous-systèmes de propulsion du vaisseau spatial.
SOMMAIRE :
Présentation générale
Les équipements du PGNCS
Le sous système inertiel
Le PEA
Le coupling data unit
Le power and servo assembly
La base de navigation
Le sous sytème optique
Le SCS : Description du système ; Fonctions d'affichage (FDAI, blocage de cardan) ; Le GP/FPI ; GDC et BMAGs ; L'Entry Monitor System
Le système primaire de guidage, de navigation et de contrôle (PGNCS ou Primary Guidance Navigation and Control System) est un équipement fourni par le gouvernement (GFE pour Government-Furnished Equipment) et est commun au CSM et au LM, à l'exception de différences dans l'optique, de différences mineures dans l'unité de mesure inertielle (mise à l'échelle de l'accéléromètre et emplacement des composants électroniques de l'accéléromètre) et de différences dans la programmation du logiciel informatique (sur cette page, il sera question de celui du CM). Le PGNCS est un système étroitement imbriqué composé de trois sous-systèmes principaux : inertiel, optique et informatique, et conçu de manière à ce que chaque sous-système puisse fonctionner indépendamment en mode d'urgence ou de secours. Par conséquent, la défaillance d'un sous-système ne désactive pas l'ensemble de PGNCS. Les trois sous-systèmes, ou leurs combinaisons, peuvent remplir les fonctions suivantes :
1) Établir périodiquement une référence inertielle utilisée pour les mesures et les calculs.
2) Calculer la position et la vitesse du vaisseau spatial par navigation optique et guidage inertiel.
3) Générer des signaux de direction et calculer les données de ciblage et les commandes de poussée nécessaires pour maintenir la trajectoire requise de l'engin spatial.
4) Fournir à l'astronaute un affichage de données qui indique l'état du G&N.
Le PGNCS donne aux astronautes la capacité de diriger le vaisseau spatial sur une trajectoire prédéfinie dans l'espace. Il peut être actionné semi automatiquement ou manuellement et exécute les fonctions de base du guidage et de navigation, semblable à celles d'un avion ou d'un bateau. À la différence que l'avion ou le bateau sont concernés par une navigation bidimensionnelle (latitude et longitude), Apollo est quant à lui, confronté à la navigation tridimensionnelle (latitude, longitude et direction).
Le PGNCS peut également être mis à jour depuis le sol par l'intermédiaire de la télémétrie.
Le système a été développé par le laboratoire d'instrumentation du MIT sous la direction de Charles Stark Draper. Le maître d'œuvre de PGNCS et fabricant de l'unité de mesure inertielle (IMU pour Inertial Measurement Unit) est la division Delco de General Motors.
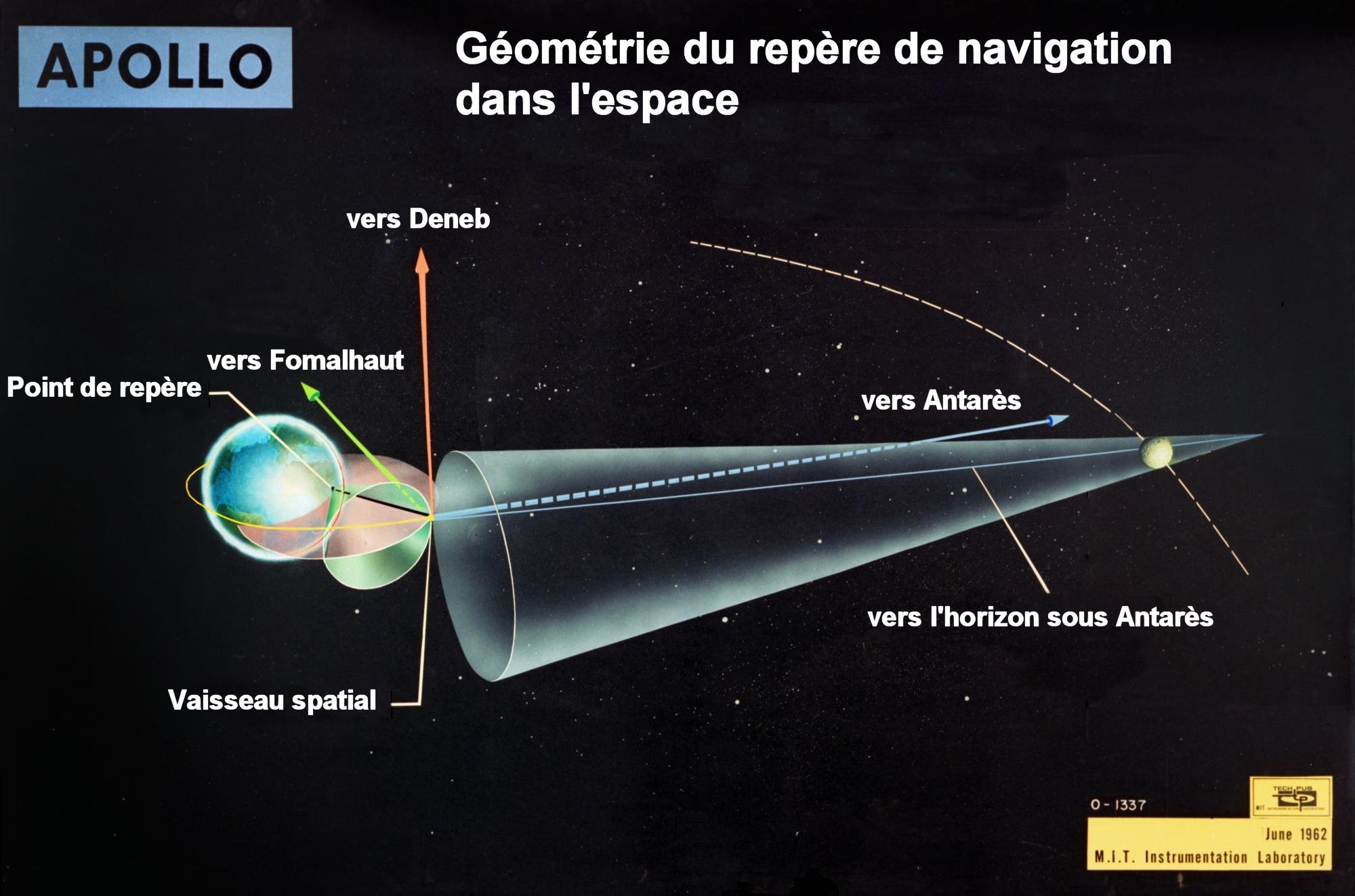
Le vaisseau Apollo (CSM) est guidé à l'aide de deux systèmes interconnectés, le PGNCS et le SCS (Stabilization & Control System, pour système de contrôle de stabilisation). Les systèmes de guidage inertiel n'étant pas parfaits, celui d'Apollo dérive d'environ un milliradian par heure. Il est donc nécessaire de réaligner périodiquement la plate-forme inertielle en visant des étoiles.
Les composants de ce système (inertiel, optique et informatique), y compris les commandes et les affichages principaux, sont localisés dans la baie d'équipements inférieure du CM fréquemment appelé "station de navigation". Le tableau de bord principal (MDC ou Main Display Console) dispose également des commutateurs et des affichages nécessaires pour que les astronautes puissent commander le vaisseau spatial depuis leurs couchettes.
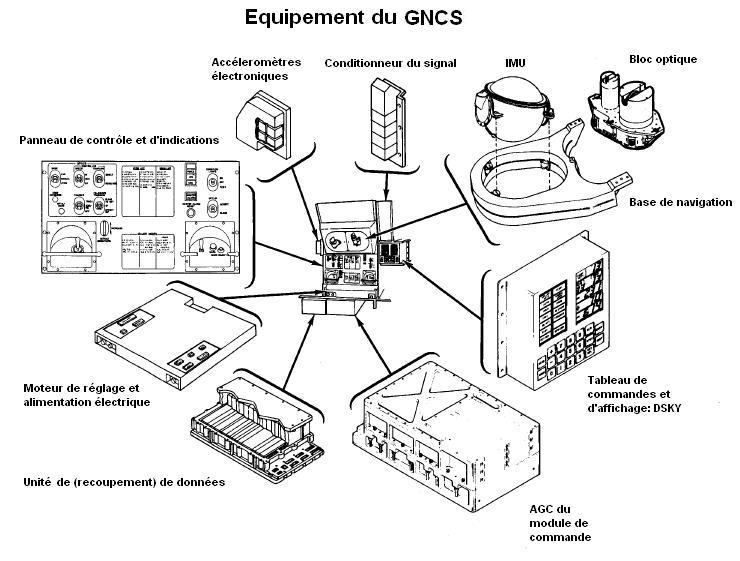
Le PGNCS remplit trois fonctions de base : le guidage inertiel, la navigation optique et le contrôle du vaisseau spatial. Pour cela, il se compose des équipements suivants :
- une centrale inertielle (IMU),
- un système informatique de guidage embarqué Apollo et son logiciel (pour cela, voir la page consacrée),
- un ensemble d'alimentation et d'asservissement (PSA pour Power and Servo Assembly),
- l'unité de couplage des données contenant l'équipement de conversion numérique-analogique et analogique-numérique (Coupling Data Unit ou CDU),
- l'ensemble électronique d'impulsions contenant les circuits nécessaires pour générer les impulsions de couple calibrées pour les accéléromètres
- un bloc optique,
- un châssis mécanique, appelé base de navigation (ou navbase) montée sur la paroi latérale du vaisseau spatial et servant de support à l'IMU et au bloc optique.
- le groupe de commande d'interconnexion de guidage et de navigation (G&N), qui comprend les faisceaux d'interconnexion et les panneaux de commande.
Les panneaux d'affichage et de commande constituent la partie avant de la structure G&N et sont placés de manière à ce qu'un astronaute puisse les voir et les actionner manuellement. Le PSA est situé sur une étagère sous la base de navigation. L'unité de données de couplage électronique et le CMC sont situés sur une étagère sous le PSA. Deux unités d'affichage et de clavier (DSKY) sont situées dans le véhicule, l'une au niveau du tableau de bord principal et l'autre dans la baie d'équipement inférieure. Le DSKY permet d'accéder au CMC et fournit des informations d'état aux astronautes.
Le PGNCS fournit au vaisseau spatial les capacités suivantes :
(1) Stabilisation de la vitesse du CM pendant l'abandon à haute altitude, après la séparation du lanceur, stabilisation après le largage de la tour d'évacuation et pendant la rentrée.
(2) Contrôle de l'attitude et de la stabilisation autour de trois axes en réponse à des commandes de rotation manuelles ou automatiques.
(3) Contrôle de translation autour de trois axes en réponse à des commandes manuelles pour les manœuvres d'évacuation, de transposition et d'amarrage.
(4) Commande de translation le long de trois axes en réponse à des commandes manuelles comme le mode de secours pour les opérations de rendez-vous et d'amarrage commandées par le LM.
(5) Contrôle de translation le long de trois axes en réponse à des commandes manuelles pour de petits changements de vitesse.
(6) Contrôle du vecteur poussée pour le SPS.
(7) Fonctions d'activation et de désactivation de la poussée du moteur SPS.
(8) Commande de guidage du moteur du S-IVb. Le PGNCS peut également être considéré comme un système fonctionnel de l'étage S-IVb puisque l'astronaute peut le sélectionner comme source de guidage pour la poussée du S-IVb. Le PGNCS utilise les entrées manuelles de l'équipage, les entrées électriques des capteurs inertiels et les signaux de l'interface du S-IVb pour générer des commandes de direction et de poussée destinées à l'unité à instruments (IU) du S-IVb
(9) Affichages pour l'indication visuelle des paramètres de contrôle.
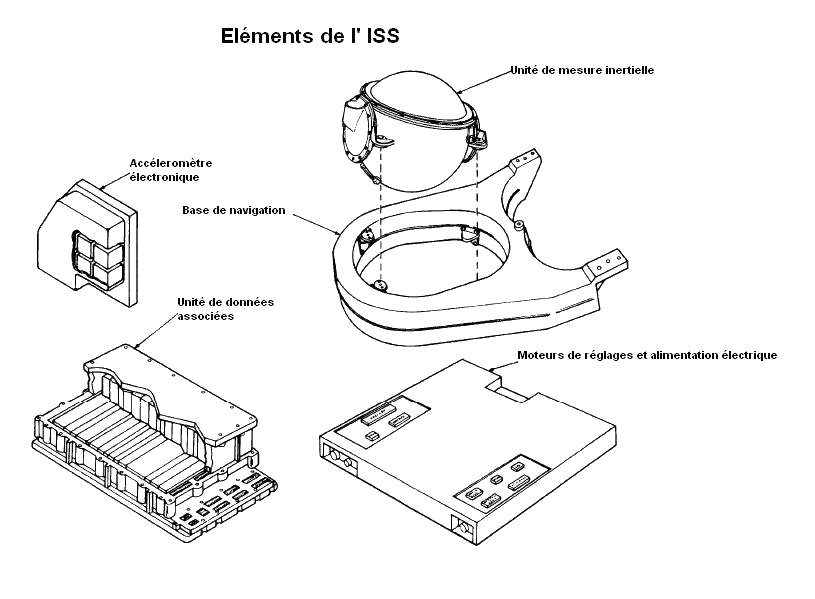
LE SOUS SYSTÈME INERTIEL (ISS)
Le sous-système inertiel (ISS ou Inertial SubSystem) se compose de l'IMU, de l'unité électronique de données de couplage et de parties du PSA et des panneaux d'affichage et de commande.
L'IMU
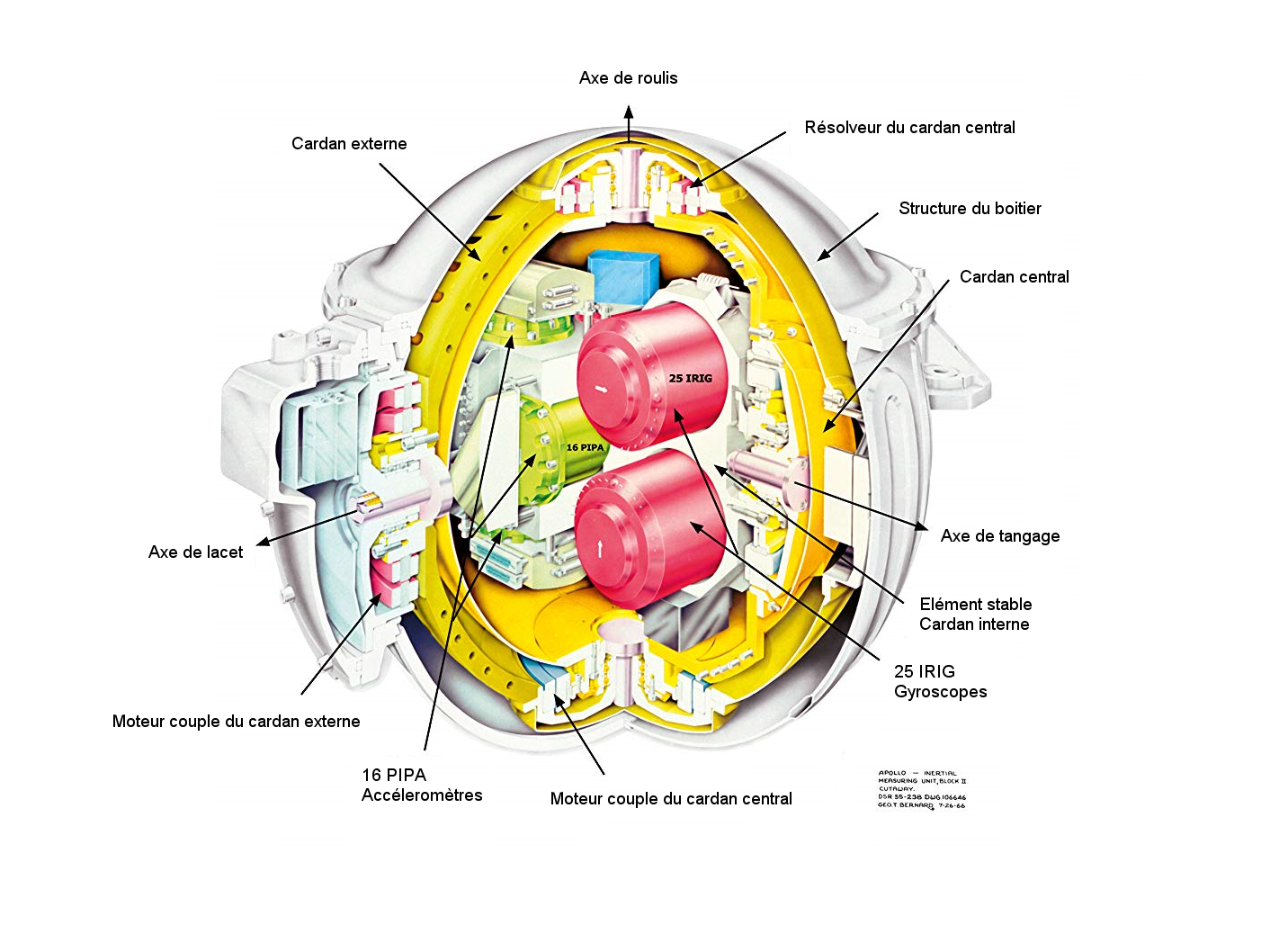
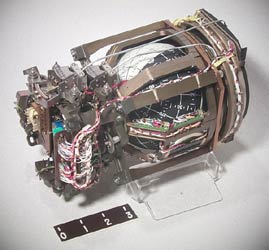
L'unité de mesure inertielle (IMU), semblable à une sphère, est le principal élément utilisé pour le guidage inertiel. À l'intérieur se trouve un système de cardan orthogonaux à 3 degrés de liberté (trois axes). Le cardan le plus à l'intérieur, appelé membre (ou élément) stable est équipé de trois gyroscopes et de trois accéléromètres. Le vaisseau peut se déplacer sans restriction autour de tous les axes du cardan interne gyrostabilisé (élément stable) tandis que celui-ci reste techniquement immobile, et maintient donc une orientation connue dans un système de coordonnées sélectionnées. L'orientation angulaire de cette plate-forme interne est obtenue à partir de résolveurs électroniques (transformateur électrique rotatif utilisé pour mesurer les degrés de rotation) montés sur les cardans. L'IMU détecte les changements de vitesse et d'attitude et les transmet au système informatique embarqué (l'AGC).
 Ci-dessus : schéma vue éclatée de l'IMU |
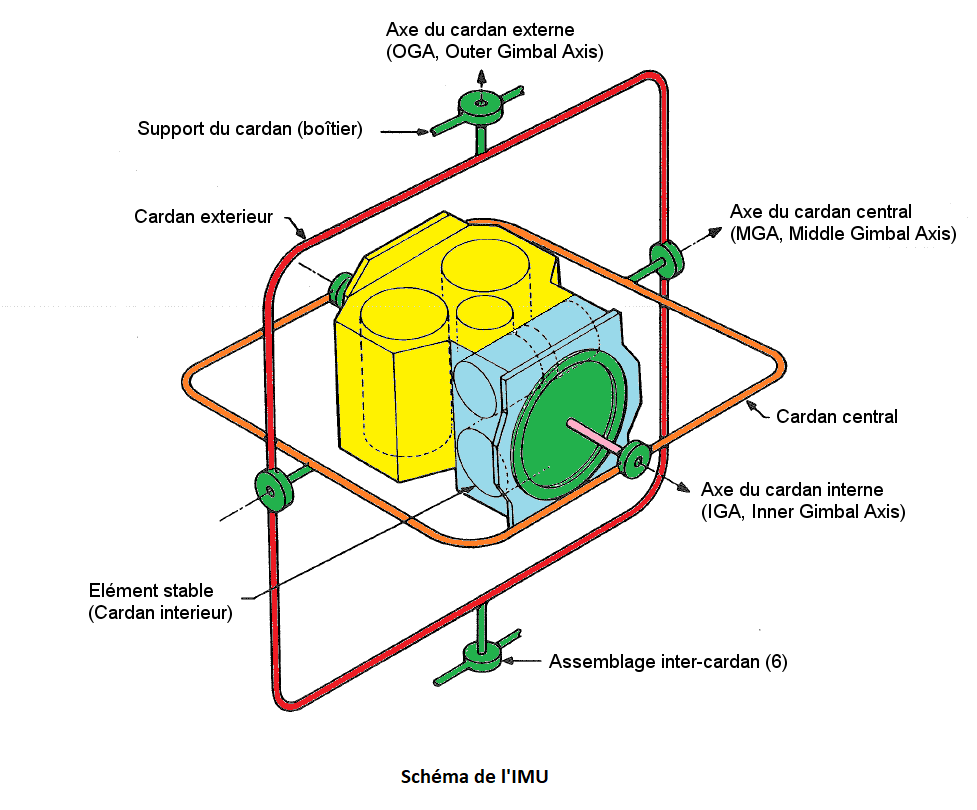 Schéma simplifié de l'IMU |
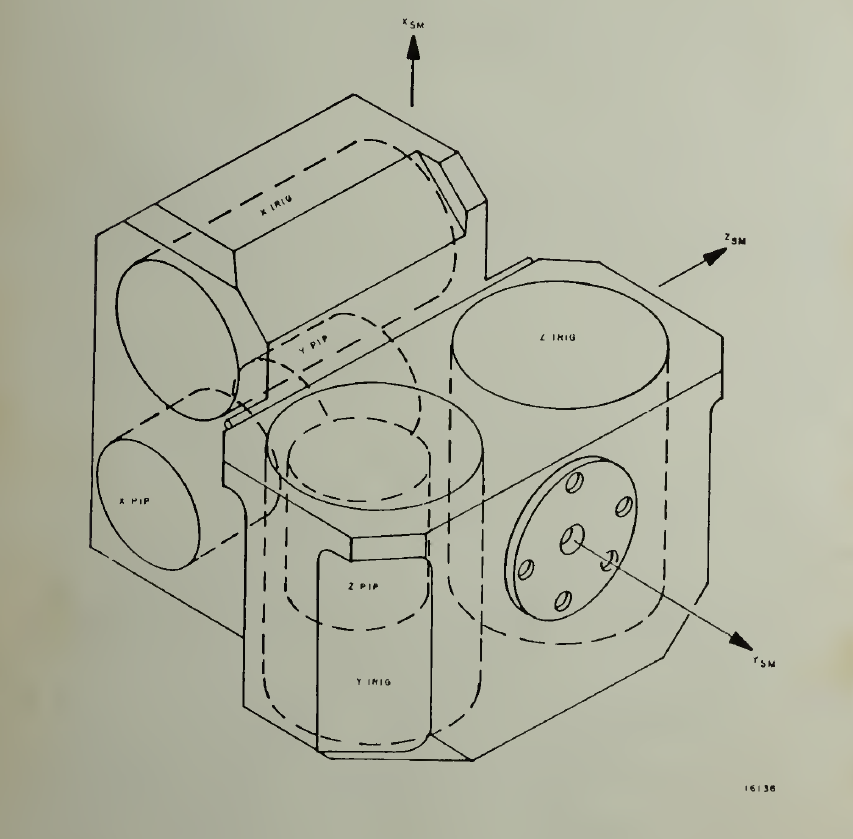
L'élément stable (ou cardan interne)
L'ISS remplit trois fonctions principales : mesurer les changements d'attitude de l'engin spatial, aider à générer des commandes de direction et mesurer la vitesse de l'engin spatial due à la poussée.
Pour accomplir ces fonctions, l'IMU fournit une référence inertielle constituée d'un élément stable, un bâti usiné dans un bloc de béryllium de 16,50 par 15 par 13,20 cm de côté avec des trous alésés pour y monter les trois "25 IRIGs" (Inertial Rate Integrating Gyros pour gyroscope intégrateur à taux d'inertie) un pour chaque axe, montés perpendiculaires les uns aux autres et les trois "16 PIPAs" (Pulsed Integrating Pendulous Accelerometer, pour accéléromètre pendulaire à pulsions). La référence inertielle de cette plate-forme stable est maintenue par les IRIGs en conjonction avec des circuits de stabilisation électroniques. L'élément stable est suspendu par deux ensembles intercardans à l'intérieur du cardan médian. Il est libre de tourner sans restriction autour de l'axe du cardan interne (IG axis). Sont également fixés à l'élément stable des préamplificateurs d'accéléromètres, des éléments chauffants de l'élément stable, des circuits et des thermostats de contrôle de température, un transformateur ducosyn et deux thermostats de sécurité.
Ces circuits utilisent les signaux des gyroscopes via les résolveurs pour contrôler les moteurs sur chaque axe. Tout déplacement de la plate-forme est détecté par l'IRIG, qui produit des signaux de sortie représentatifs de l'amplitude et de la direction du déplacement.
Les signaux IRIG sont appliqués à des amplificateurs d'asservissement, qui conditionnent les signaux pour entraîner des moteurs couple. Ces derniers restaurent ensuite l'orientation initiale de la plate-forme en entraînant les cardans jusqu'à ce que les signaux des IRIGs soient annulés. Ce système d'asservissement par rétroaction maintient l'élément stable fixe par rapport à l'espace inertiel.
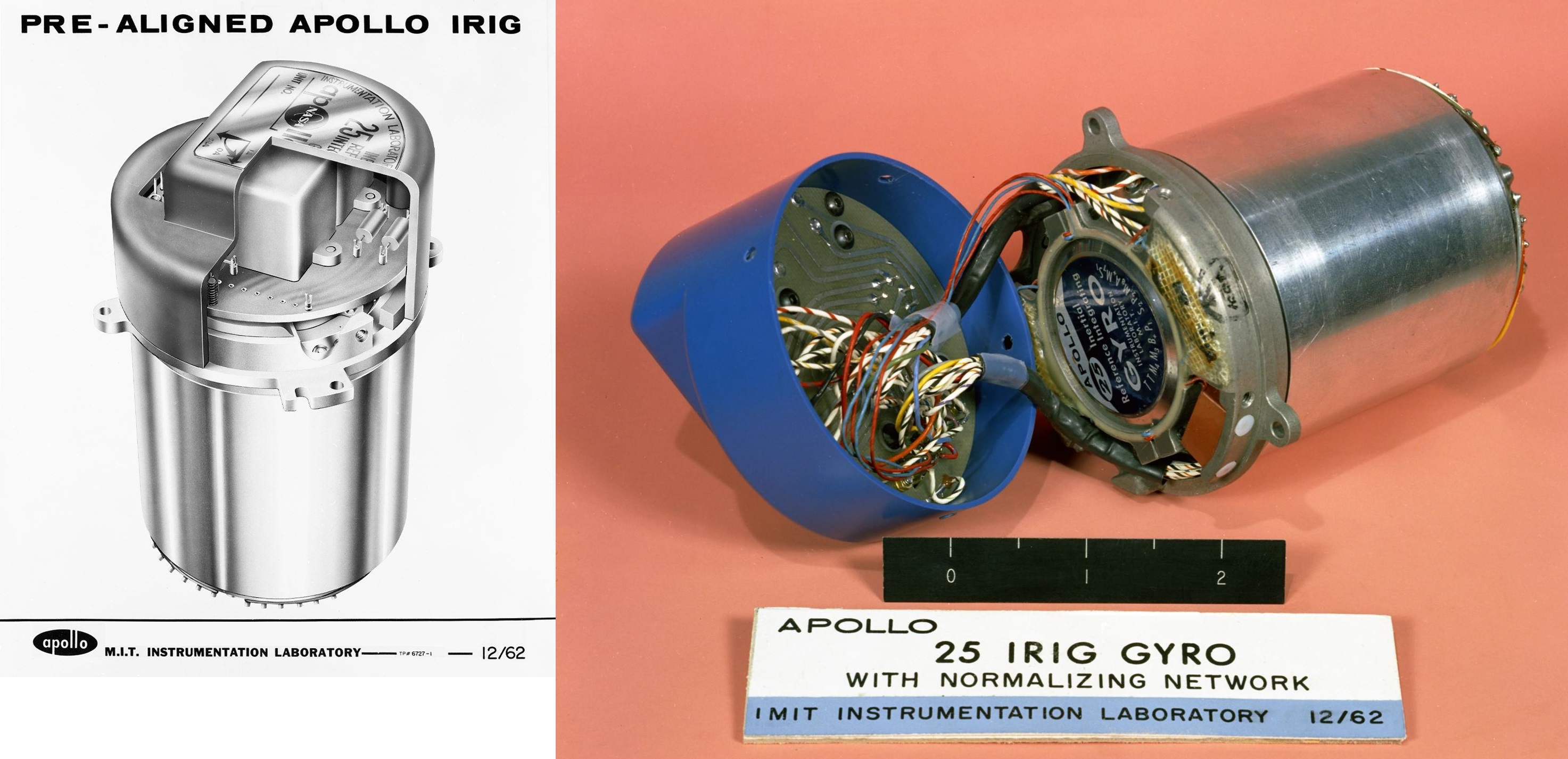
Le saviez vous? Le gyroscope de stabilisation "25 IRIG" est un gyroscope intégrateur à un seul degré de liberté flottant (suspendu par un fluide et magnétiquement). Il fait partie de la série 25 des instruments inertiels. La désignation 25 indique le diamètre du boîtier en dixièmes de pouces.
Les "16 PIPA", fabriqués par la Sperry Gyroscope Company, sont montés orthogonalement et mesurent la moindre accélération sur chacun des 3 axes. N'importe quelle force de translation éprouvée par le vaisseau spatial cause une accélération ou une décélération qui sont perçues par un ou plusieurs PIPA. Chaque PIPA produit un signal de sortie proportionnel à l'importance et à la direction du changement de vitesse. Ce signal, sous forme d'une ligne d'impulsion, est envoyé à l'AGC, qui emploiera ce signal pour mettre à jour l'information sur la vitesse.
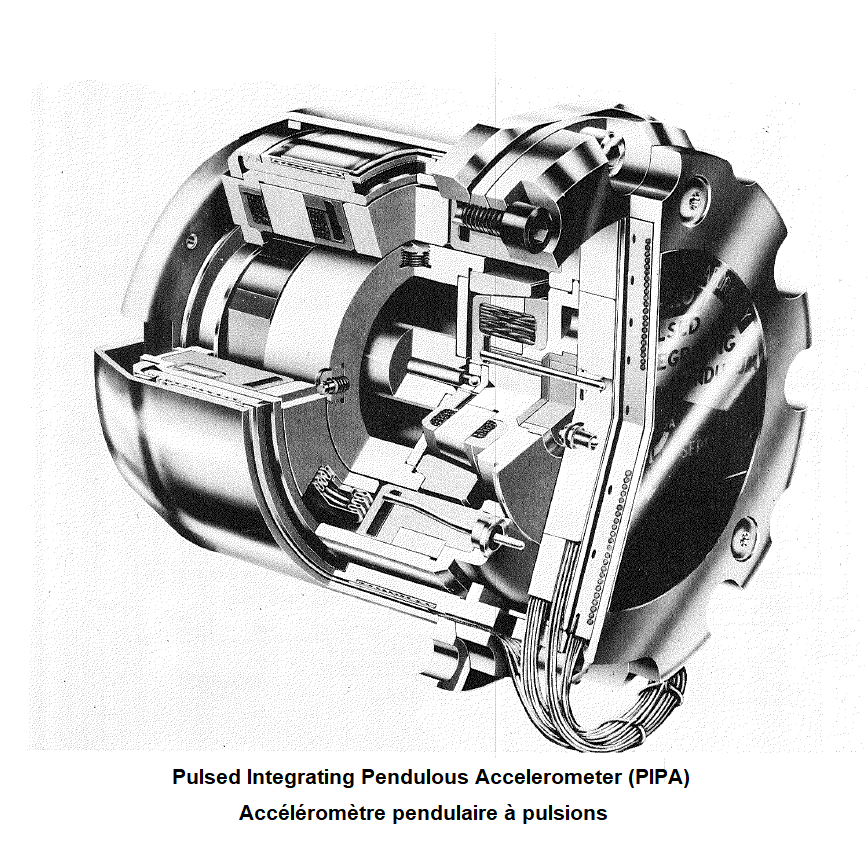 |
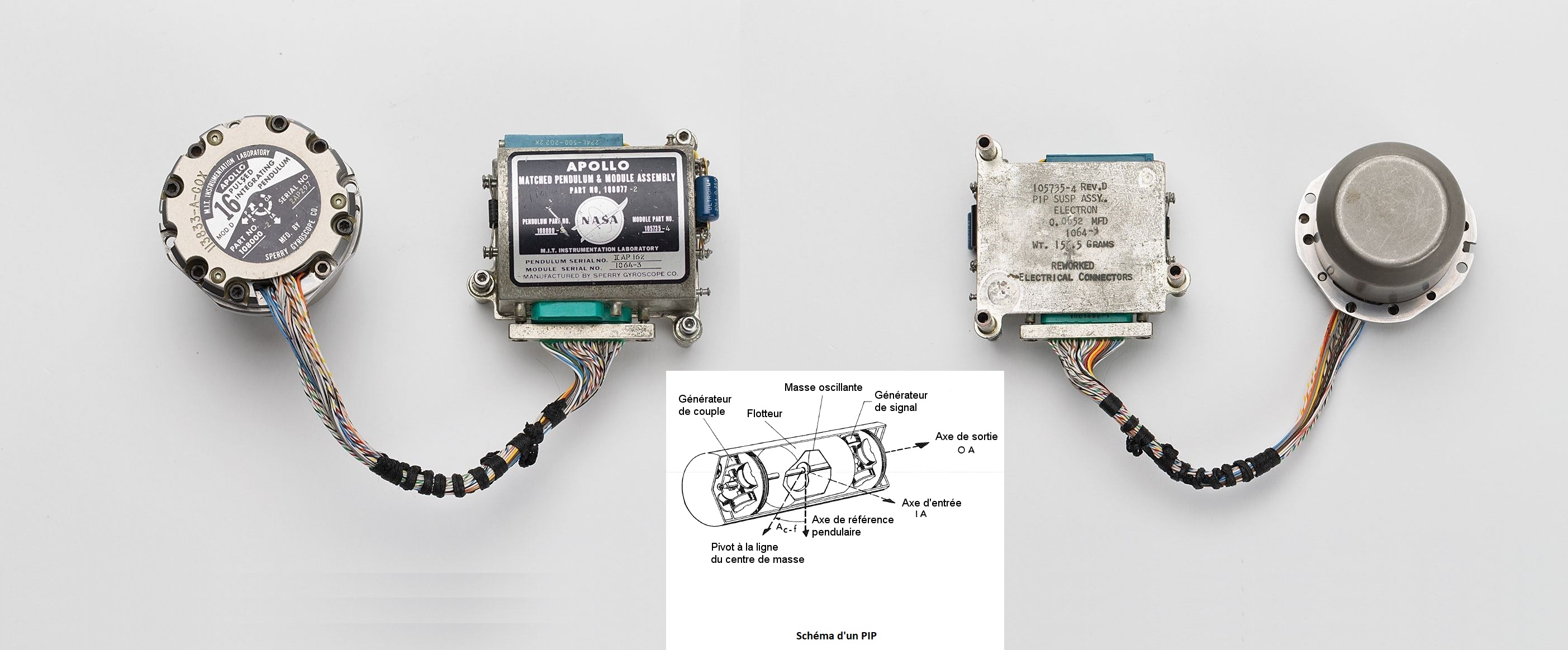 ci dessus: photo montage d'un "16 PIPA" |
Le cardan central
Le cardan central est suspendu par deux ensembles intercardan à l'intérieur du cardan externe. Il supporte à son tour l'élément stable. Des bagues collectrices situées dans les ensembles intercardans permettent de transmettre des signaux électriques entre le cardan externe et l'élément stable. Le cardan central a un diamètre d'environ 24 cm (9,5 in). Il n'y a aucun composant électrique sur le cardan central. Il est constitué de deux hémisphères en aluminium hydroformé de 1,01 mm (0,040 in) d'épaisseur, épinglés et boulonnés ensemble au niveau de brides en aluminium brasées.
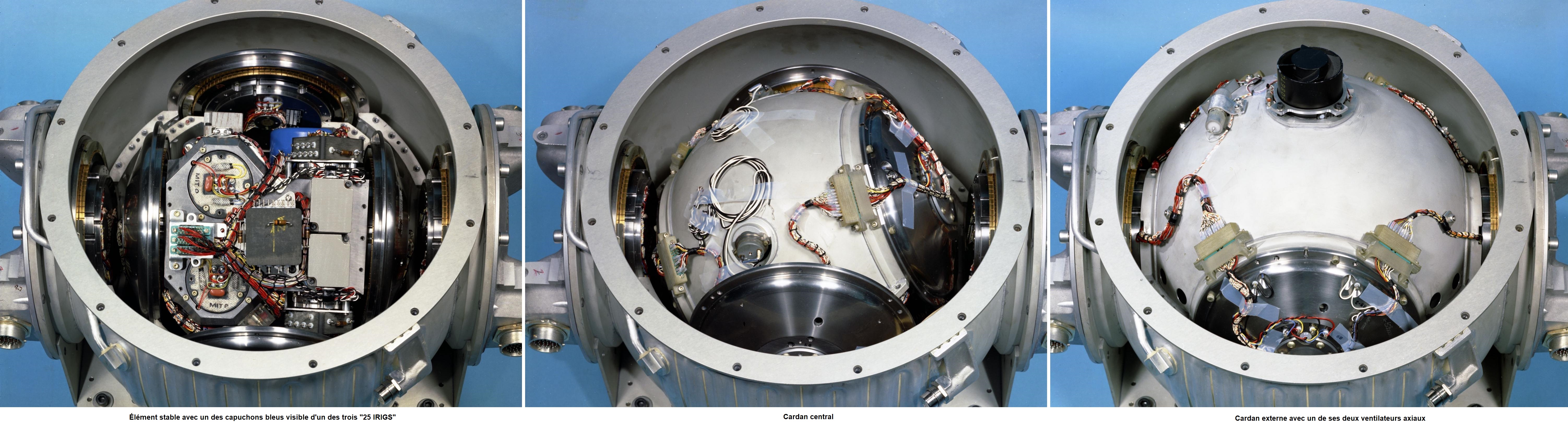
Le cardan externe
Le cardan externe est de configuration similaire au cardan central, étant suspendu à l'intérieur du support de cardan par deux ensembles intercardan. Il est équipé de deux ventilateurs axiaux à commande thermostatique montés dans ses parois pour forcer l'air du voisinage du cardan central vers les parois du boîtier, où la chaleur est transférée à une solution de refroidissement eau-glycol circulant dans des passages du boîtier. D'un diamètre d'environ 27 cm (10,6 in), il est constitué, lui aussi, de deux hémisphères en aluminium hydroformé de 1,01 mm (0,040 in) d'épaisseur, épinglés et boulonnés ensemble au niveau de brides en aluminium brasées.
Les ensembles intercardans
Les ensembles intercardan au nombre de six remplissent quatre fonctions de base : les roulements à billes duplex supportent le cardan avec un minimum de friction, le moteur couple entraîne le cardan en réponse à un signal d'erreur, le résolveur multivitesse fournit des signaux qui représentent la position angulaire du cardan, et le résolveur d'erreur de gyroscope (cardan interne uniquement) transforme les signaux d'erreur de gyroscope en signaux d'erreur d'angle de cardan. Des bagues collectrices sont également montées dans chaque ensemble intercardan fournissant un moyen de transferer les signaux électriques depuis l'élément stable et les ensembles intercardan et permettant 360° de liberté pour chaque cardan.
Exemple avec l'ensemble intercardan de l'élément stable
L'un de ces ensembles intercardan contient un servomoteur à courant continu de type pancake avec un entrefer de 9,65 cm (3,8 in) de diamètre, une bague collectrice à 40 circuits et une paire de roulements à billes duplex préchargés pour fournir un taux de rendement axial prédéterminé de 0,1778 micron (7 micro-in/lb). Le boîtier de l'ensemble intercardan et l'arbre de liaison sont fabriqués en béryllium. Le bout de l'arbre supporte le rotor du moteur couple et l'ensemble de bagues collectrices qui se terminent par des connecteurs assurant l'interface avec le harnais de l'élément stable et les bagues collectrices de l'axe central. Les fils des bagues collectrices sont fixés au boîtier à quelques centimètres de l'ensemble de bagues collectrices de sorte qu'ils fléchissent avec les légères oscillations de la suspension à cardan sans que les bagues collectrices et les brosses ne se déplacent les uns par rapport aux autres. L'usure des bagues collectrices est ainsi éliminée dans la plupart des conditions de fonctionnement. Les roulements sont flottants axialement pour tenir compte des tolérances de fabrication et de la dilatation thermique.

L'autre ensemble intercardan contient une combinaison d'un émetteur résolveur à 1 vitesse/16 vitesses, un résolveur de signal d'erreur gyroscopique à 1 vitesse, un ensemble de bagues collectrices à 40 circuits et une paire de roulements à billes duplex préchargés de la même manière que ceux de l'autre extrémité de l'axe. L'arbre secondaire supporte les rotors du résolveur et l'ensemble de la bague collectrice. Les résolveurs sont alignés avec précision, par le fabricant de résolveurs, par rapport aux fentes d'alignement sur l'arbre d'embase et le boîtier. Ces fentes s'engagent dans les goupilles de l'élément stable et du cardan central. Les roulements de cet ensemble sont fixes et fournissent donc un support axial à l'élément stable. L'axe de rotation, tel que déterminé par les roulements, définissent l'axe intérieur, qui a une rotation illimitée.
Le boîtier à cardan
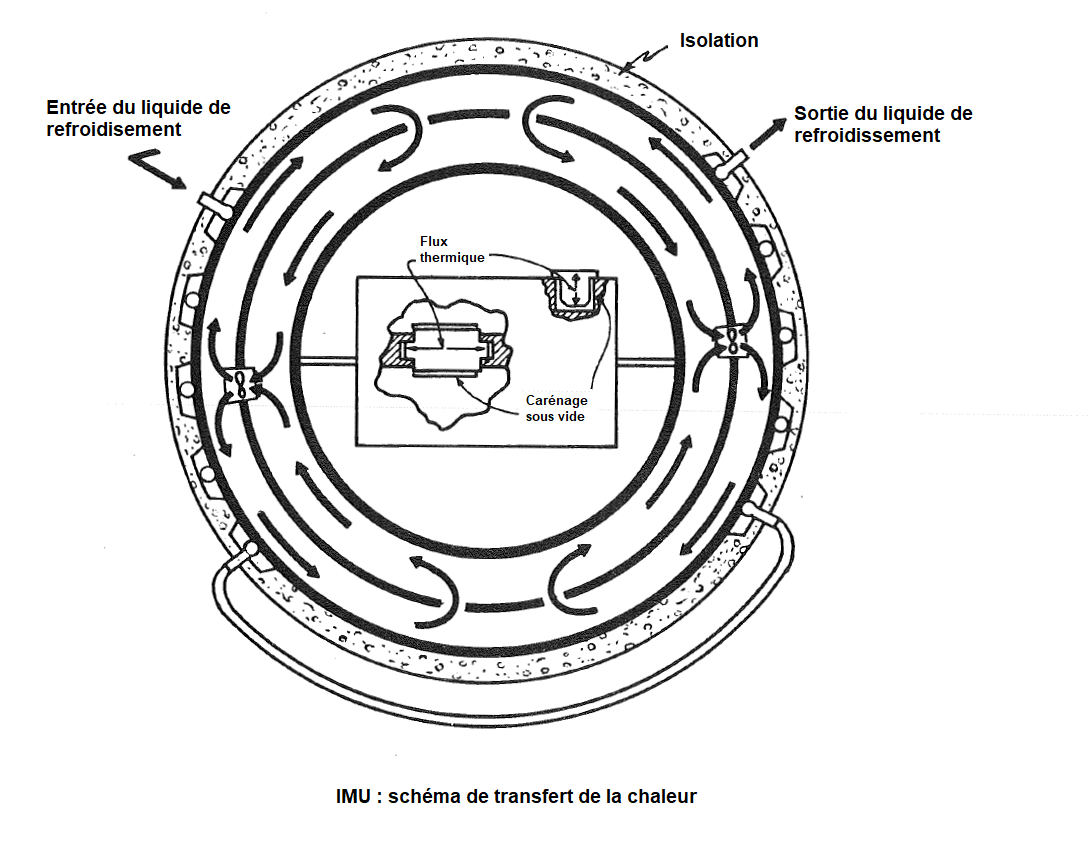
Ce boîtier est l'enceinte qui supporte les trois cardans et leurs accessoires décrits dans les paragraphes précédents. Le cardan externe est suspendu à l'intérieur du boîtier par deux assemblages intercardan qui permettent une totale liberté de rotation. Le système IMU est régulé thermiquement. Pour cela, le boîtier de l'IMU a été fabriqué à partir de sections sphériques hydroformées en aluminium de 1,52 mm (0,060 in) d'épaisseur avec des passages de liquide de refroidissement intégrés, gonflés et laminés, dans lesquels circule une solution d'eau-glycol à 7,2°C (à l'entrée) à un taux de 14,96 kg/h pour dissiper la chaleur générée par les composants inertiels et les modules électriques afin de les maintenir à des températures de fonctionnement constantes. Deux raccords hydrauliques à déconnexion rapide Seaton-Wilson relient ces passages à l'alimentation en liquide de refroidissement du CM. Le boîtier, d'un diamètre d'environ 32 cm (12,6 in), est entouré d'un matériau isolant pour éviter la condensation sur les passages du liquide de refroidissement. L'IMU est scellé pour maintenir une pression d'une atmosphère afin de faciliter le refroidissement par convection lorsqu'il est soumis à des pressions inférieures à une atmosphère.
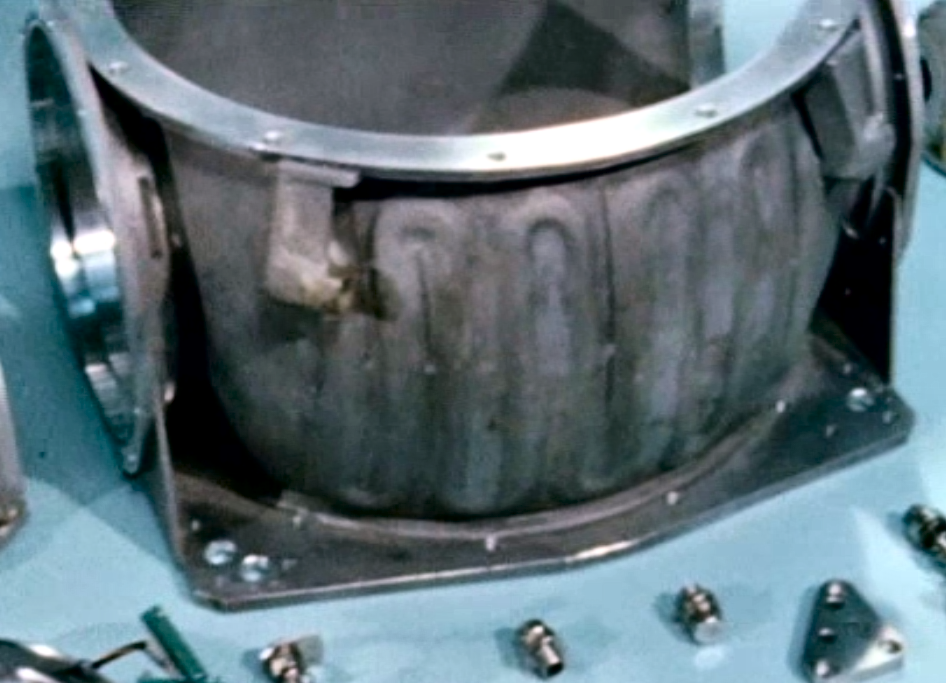 Boîtier de l'IMU vide, capture image émission TV Moon Machines (2008). Noter les passages de liquide de refroidissement |
 |
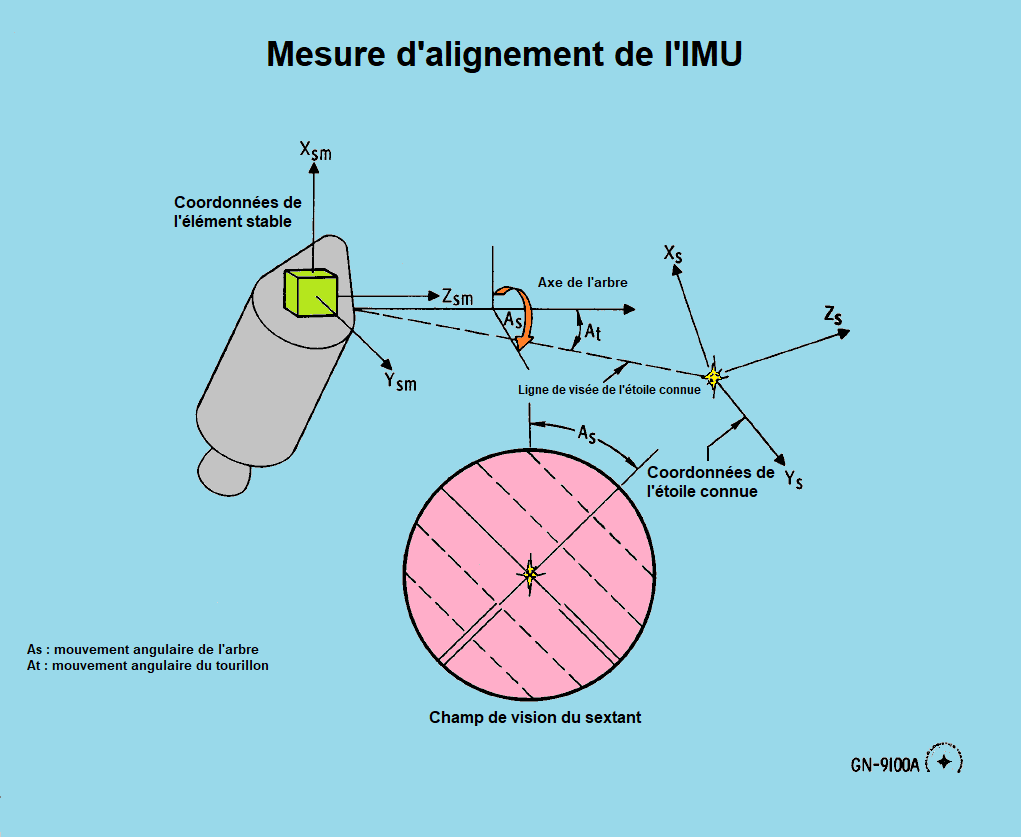
Remarque : pendant le fonctionnement normal, l'angle du cardan central ne doit pas dépasser ±70°. L'élément stabilisé de l'IMU est aligné sur une référence prédéterminée à chaque fois que l'ISS est mis sous tension et pendant une utilisation prolongée. Avant le lancement, l'alignement est réalisé par érection verticale et alignement azimutal contrôlé par un programme informatique de compas gyroscopique. Pendant le vol, l'alignement peut être accompli en pointant les instruments optiques sur des objets célestes ou il peut résulter d'informations transmises via le MSFN.
Une fois le sous-système inertiel alimenté et aligné, tout mouvement de rotation de l'engin spatial concernera l'élément stable, qui reste fixe dans l'espace. Les résolveurs, montés sur les axes des cardans, agissent comme des dispositifs de détection angulaire et mesurent l'attitude de l'engin spatial par rapport à l'élément stable. Ces mesures angulaires sont affichées à l'astronaute par le FDAI et les changements angulaires sont envoyés à l'AGC via le CDU. L'attitude souhaitée du vaisseau spatial est calculée par l'AGC et comparée aux angles réels de la nacelle de l'IMU. Toute différence entre les angles réels et les angles souhaités de la nacelle, tels que calculés par l'ordinateur, entraîne des signaux d'erreur d'attitude qui modifient l'attitude de l'engin spatial via le SPS ou le RCS.
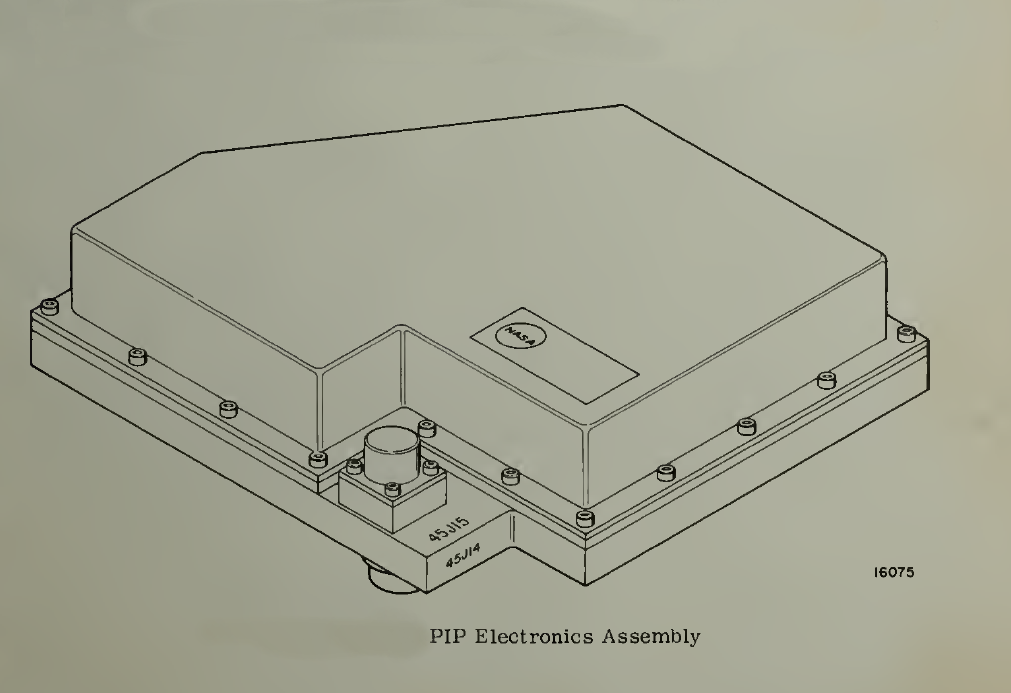
LE PEA OU PIP ELECTRONICS ASSEMBLY
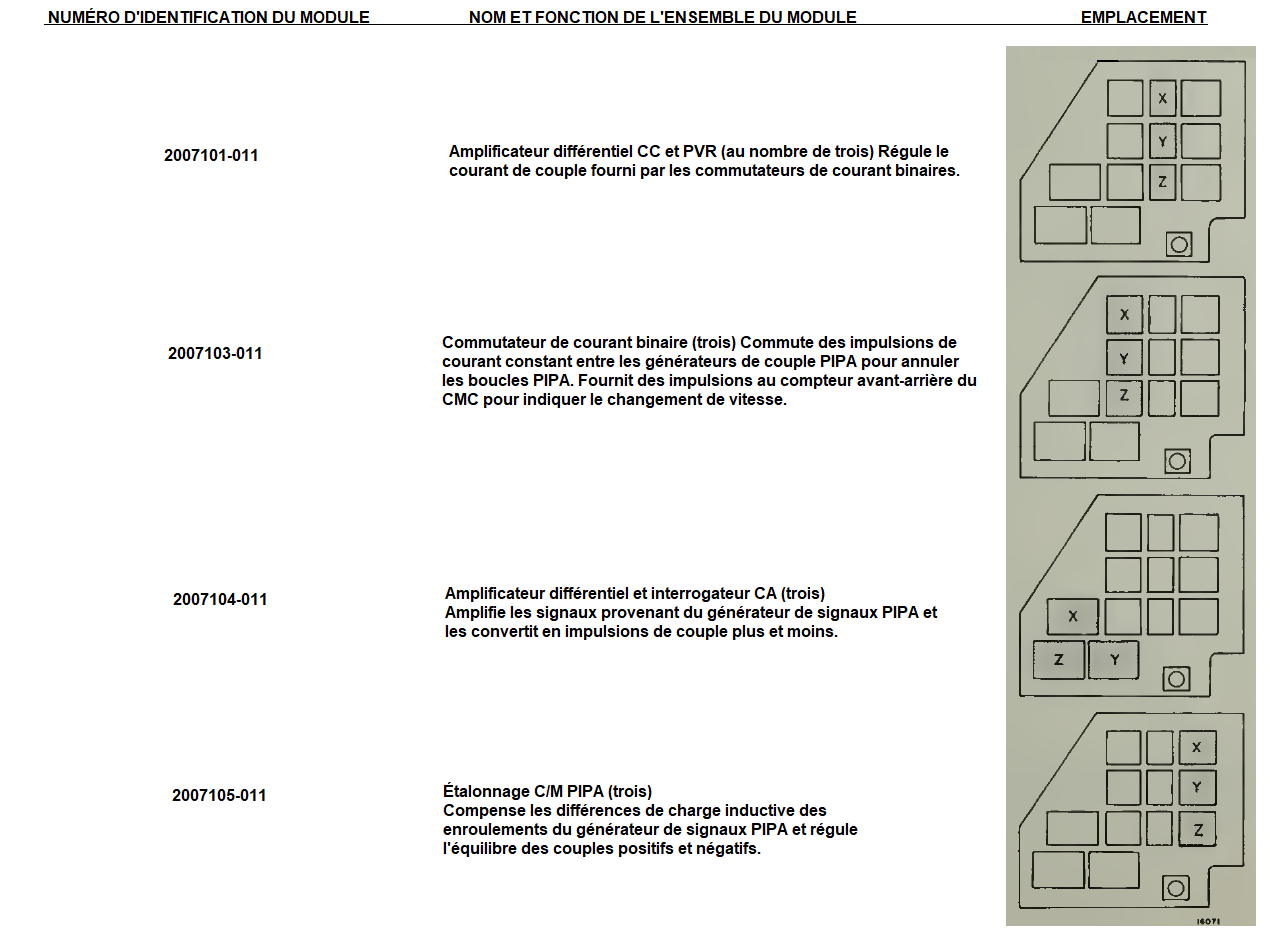
La PEA consiste en un groupe d'ensembles électroniques modulaires dont les fonctions sont liées aux composants inertiels de l'IMU. La PEA est montée à proximité de l'IMU afin d'éviter toute perte de ligne dans les signaux de bas niveau. Le tableau ci-dessous identifie et énumère les fonctions des différents modules qui le composent. Le PEA possède deux connecteurs : un connecteur à 85 broches (J14) utilisé pour connecter le PEA à l'IMU et au PSA, et un connecteur à 44 broches (J15) utilisé comme connecteur de test PIP. Le PEA mesure environ 23 cm (9,1 in) de haut, 25,4 cm (10 in) de large et 6,6 cm (2,6 in) de profondeur.
 |
 |
L'unité de couplage des données (CDU), un dispositif entièrement électronique, est utilisée comme élément d'interface entre l'ISS et le CSS (Computer Subsystem : AGC + DSKY), l'OSS (Optical Subsystem) et le CSS et le CSS et divers contrôles et affichages. Il fonctionne principalement comme un convertisseur analogique-numérique (A/D) ou numérique-analogique (D/A). Le convertisseur A/N convertit les signaux du résolveur en informations numériques qui sont stockées dans un compteur binaire à 16 étages appelé compteur de lecture. Le convertisseur numérique/analogique accepte les impulsions du CMC, les stocke dans un compteur binaire à 9 étages appelé compteur d'erreurs et fournit des signaux de sortie en courant alternatif et en courant continu proportionnels aux impulsions stockées. Une voie de retour numérique entre le compteur de lecture et le compteur d'erreurs est prévue pour compter à la hausse lorsque le compteur de lecture compte à la baisse et vice versa. Le CDU se compose de deux ensembles de plateaux contenant un total de 32 modules de dix types. Les deux plateaux, X et S, sont boulonnés l'un à l'autre, les côtés du module se faisant face. L'unité, construite principalement en magnésium et mesurant environ 14 cm (5,5 in) de haut, 28,7 cm (11,3 in) de large et 50,8 cm (20 in) de profondeur, est montée sur une plaque froide dans le CM. Le plateau X a un connecteur utilisé uniquement pour les tests au niveau des composants, un connecteur, J53, utilisé pour se connecter au faisceau d'interconnexion A du PGNCS, et une vanne de remplissage utilisée pour pressuriser le CDU. Les modules du CDU fournissent cinq canaux distincts (mais presque identiques) pour coupler le CMC à l'IMU (3 : un pour le cardan intérieur, un pour le central et un dernier pour l'extérieur) et à l'OUA (2 : axes de l'arbre et du tourillon du sextant). En plus des cinq canaux séparés, le CDU contient quatre modules qui sont partagés par tous les canaux. Les fonctions de base du CDU sont les suivantes :
(1) Interpréter les commandes (numériques) provenant du CMC et les convertir en signaux de positionnement de cardan IMU (analogiques).
(2) Interpréter les positions du cardan (analogique) et transmettre les informations au CMC (numérique).
(3) Coupler l'IMU au FDAI.
(4) Interpréter les angles d'arbre et de tourillon du sextant (analogiques) et transmettre l'information au CMC (numérique). Le CDU convertit les informations angulaires de l'arbre et du tourillon du sextant optique provenant des signaux du résolveur de l'arbre 16X et du tourillon 64X en informations numériques. L'angle du résolveur est numérisé en bits égaux à 2,5 secondes d'arc pour le tourillon et à 20 secondes d'arc pour l'arbre, puis stocké dans les compteurs de lecture. Les compteurs de lecture sont incrémentés au même rythme que les compteurs de lecture utilisés pour les angles du cardan de l'IMU. Lorsque le compteur de lecture est incrémenté, la sortie de débordement du premier étage (équivalente à 5 secondes d'arc par impulsion pour le tourillon et à 40 secondes d'arc par impulsion pour l'arbre) est envoyée au CMC pour indiquer la modification des angles du résolveur.
(5) Interpréter les commandes (numériques) du CMC et les convertir en signaux de positionnement OUA (analogiques).
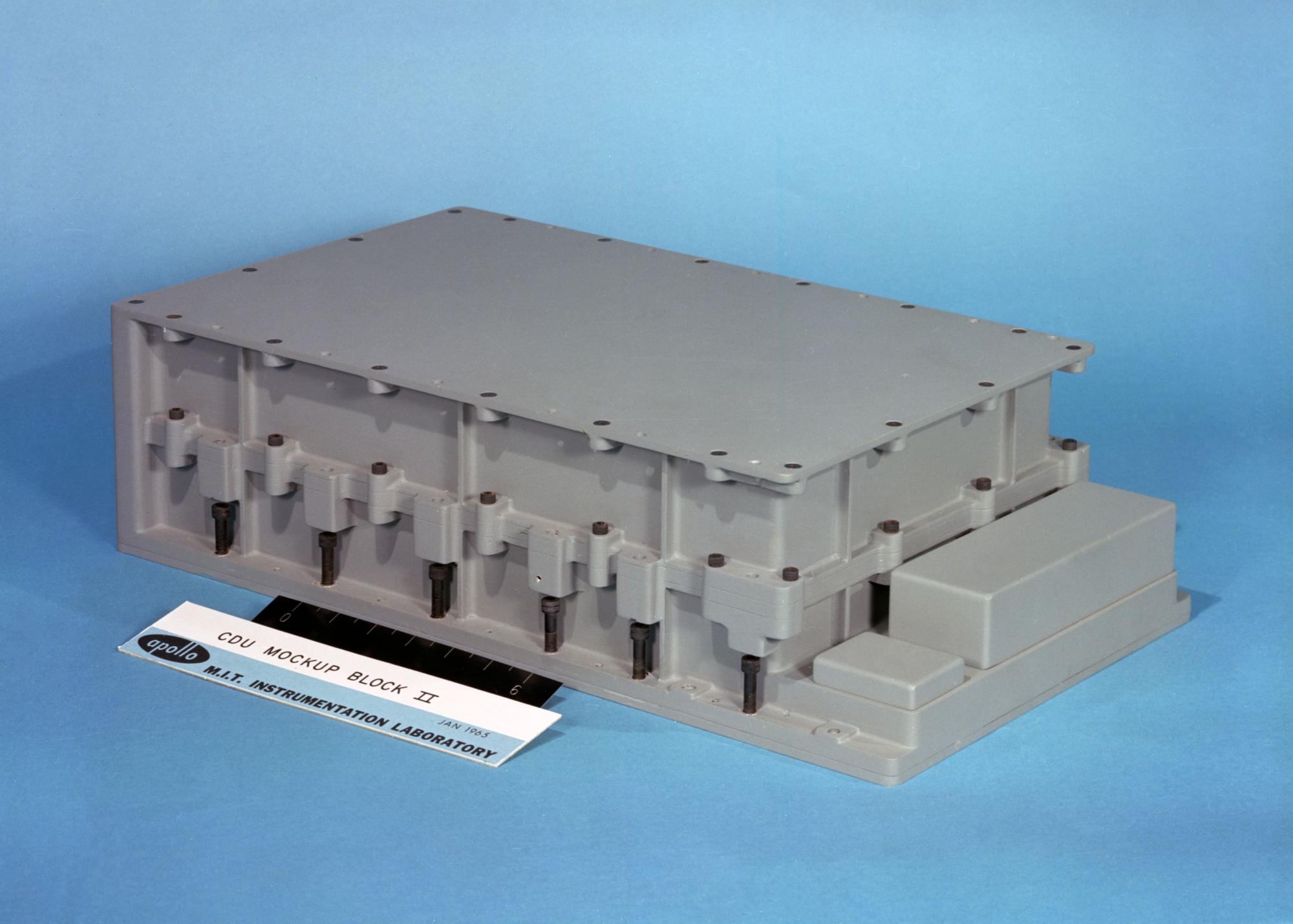 Maquette d'un CDU Block II |
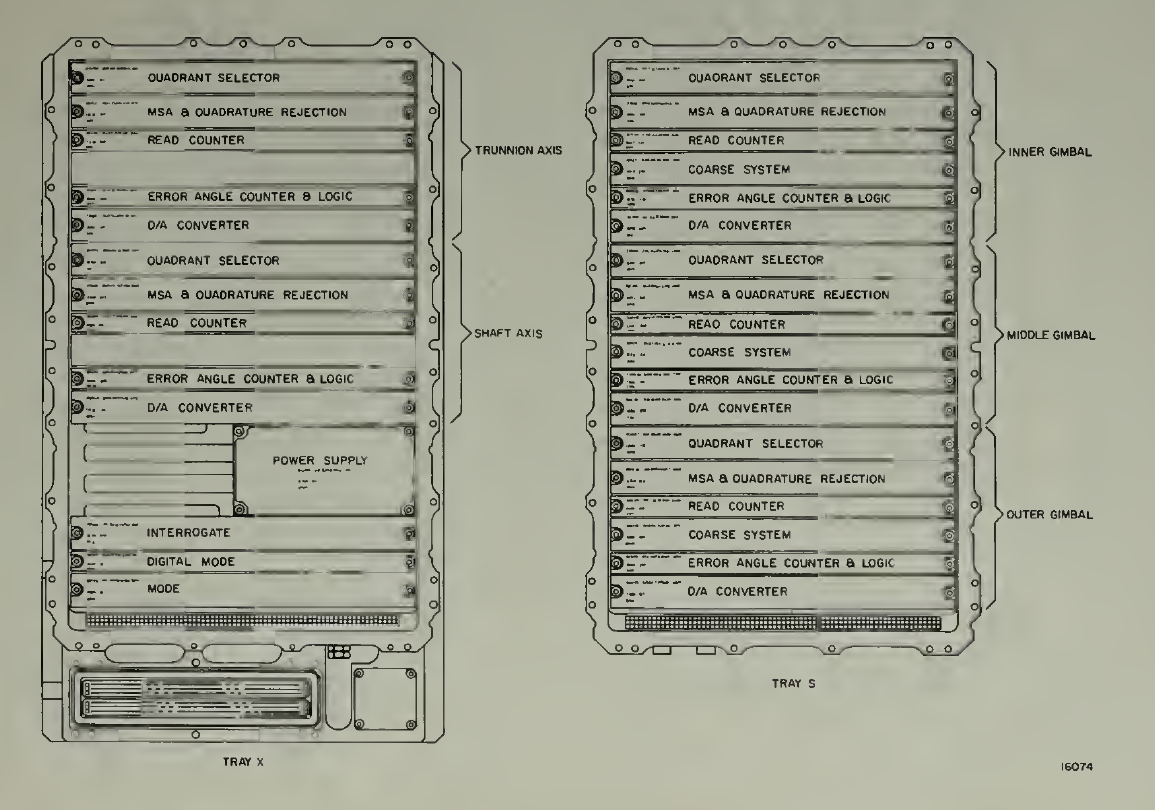 Emplacement des modules dans un CDU |
La partie ISS du CDU remplit les fonctions suivantes :
a) Convertir les angles de cardan de l'IMU de la forme analogique à la forme numérique et fournir ces informations à l'AGC.
b) Convertir les signaux numériques de l'AGC en signaux 800 cps ou en signaux de courant continu.
c) Contrôler la modulation de l'ISS par la manipulation logique de discrétions informatiques.
Le CDU convertit les informations angulaires du cardan de l'IMU provenant des signaux analogiques des résolveurs lX et 16X en informations numériques. L'angle du résolveur est numérisé en bits, égaux à 20 secondes d'arc chacun, et stocké dans le compteur de lecture. Un signal d'erreur proportionnel à la différence entre l'angle du résolveur et l'angle du CDU (l'angle enregistré par le compteur de lecture) provoque le décompte du compteur de lecture.
Le compteur de lecture compte jusqu'à ce que le signal d'erreur soit annulé. Si la différence entre l'angle du résolveur et l'angle du CDU est supérieure à 400 secondes d'arc, le compteur de lecture est incrémenté à une vitesse de 12,8 kpps. La vitesse d'incrémentation sera de 800 pps si la différence est inférieure à 400 secondes d'arc. Lorsque le compteur de lecture est incrémenté, la sortie de débordement du premier étage (équivalente à 40 secondes d'arc par impulsion) est envoyée au CMC pour indiquer le changement d'angle du résolveur.
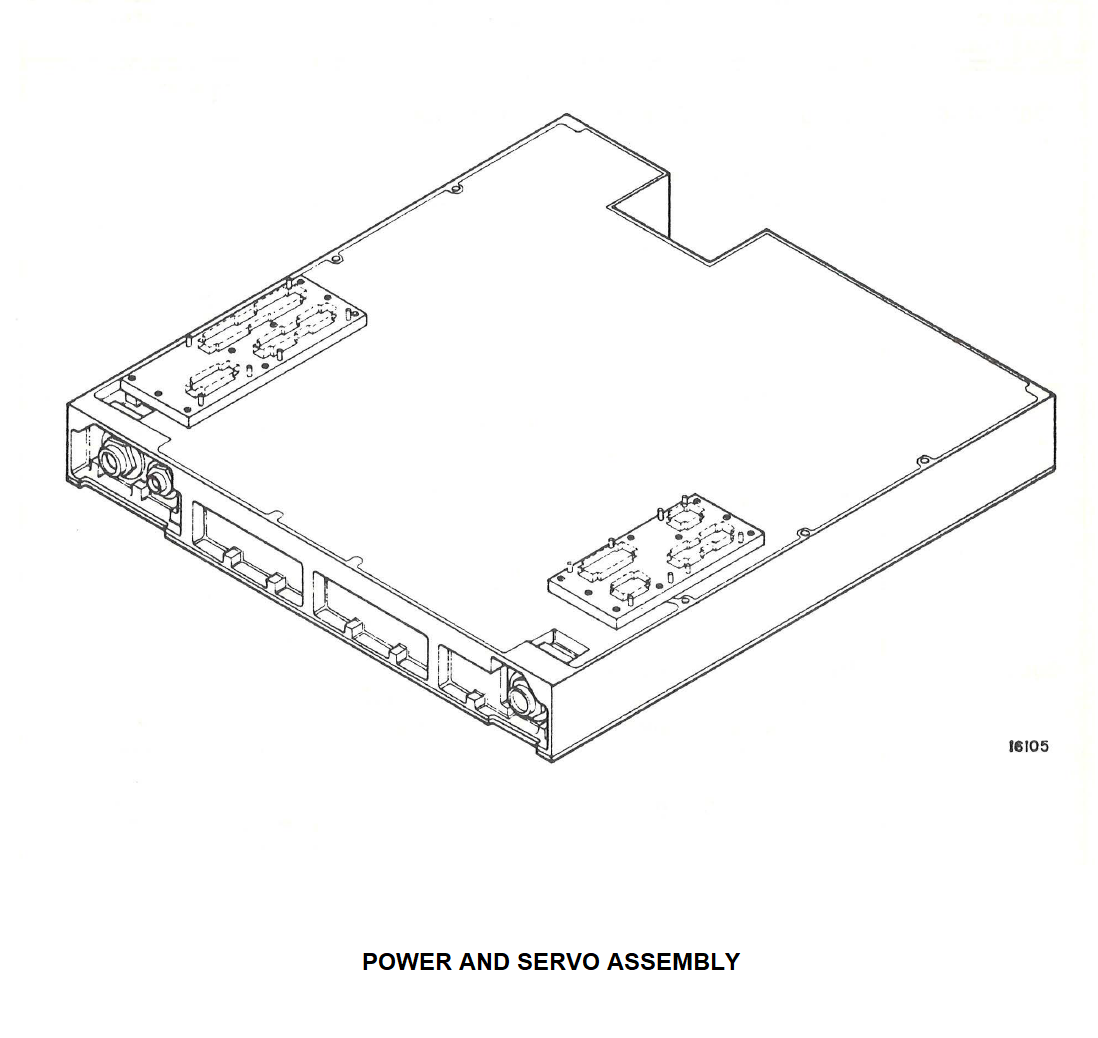
POWER AND SERVO ASSEMBLY (PSA pour ensemble d'alimentation et d'asservissement)
Le PSA est une collection d'électronique dans un boîtier commun, en magnésium, qui supporte le fonctionnement de l'unité de mesure inertielle (IMU), de l'unité optique (OUA) et d'autres parties du système avec des alimentations, des servo-amplificateurs, etc. Ces divers circuits sont emballés dans des modules de différentes tailles. Ceux-ci se branchent sur un collecteur unique qui assure les connexions modulaires internes et les connexions système nécessaires, ils se vissent vers le haut dans ce collecteur. Chacun d'entre eux présente au collecteur une surface plane permettant d'établir un bon contact thermique. Le collecteur est à son tour vissé à la plaque froide qui fait partie du vaisseau spatial. Cette dernière dissipe la chaleur générée par les composants électroniques grâce à la circulation d'un liquide de refroidissement fournit par le vaisseau spatial. Une fois les modules branchés dans le collecteur, un couvercle est placé sur le cadre pour compléter l'étanchéité des modules et des connecteurs. Au total, 37 modules composent le PSA.
Le PSA possède 10 connecteurs : deux à 61 broches (J1 et J3) utilisés pour le test et le contrôle ; un à 19 broches (J2) utilisé pour connecter le contrôleur de température portable au PSA pour le contrôle GSE de la température de l'IMU ; un à 323 broches (J4) qui connecte le PSA au CMC, au CDU et au panneau principal DSKY via le harnais d'interconnexion PGNCS D, et également utilisé pour le test et le contrôle ; un à 116 broches (J5) qui relie le SXT au PSA par le biais du harnais d'interconnexion PGNCS B ; un à 193 broches (J6) qui relie l'IMU et le PEA au PSA par le biais du harnais d'interconnexion PGNCS C ; un à 114 broches (J7) qui relie le panneau de commande des indicateurs au PSA par l'intermédiaire du harnais d'interconnexion PGNCS E ; un à 68 broches (J8) qui relie le panneau de navigation DSKY au PSA par l'intermédiaire du harnais d'interconnexion PGNCS H, et également utilisé pour le test et le contrôle ; un à 66 broches (J9) qui relie le SCT au PSA par l'intermédiaire du harnais d'interconnexion PGNCS F ; et un dernier à 192 broches (J10) qui relie le module de conditionnement de signaux au PSA par l'intermédiaire du harnais d'interconnexion PGNCS G, et également utilisé pour le test et le contrôle. Le PSA mesure environ 7 cm (2,75 in) de haut, 58,7 cm (23,1 in) de large et 57,4 cm (22,6 in) de profondeur.
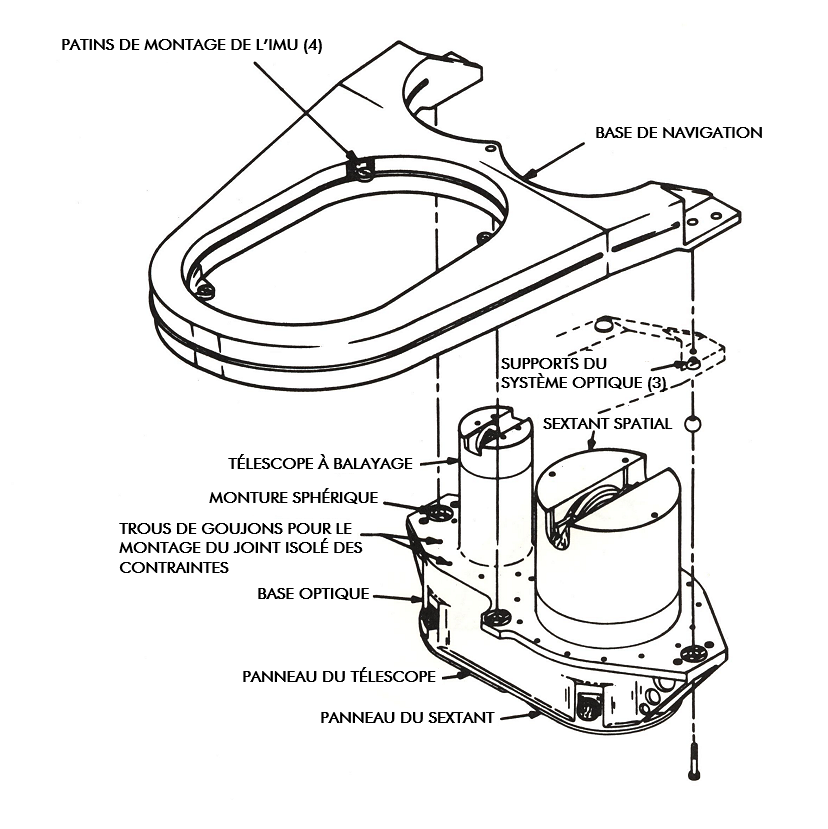
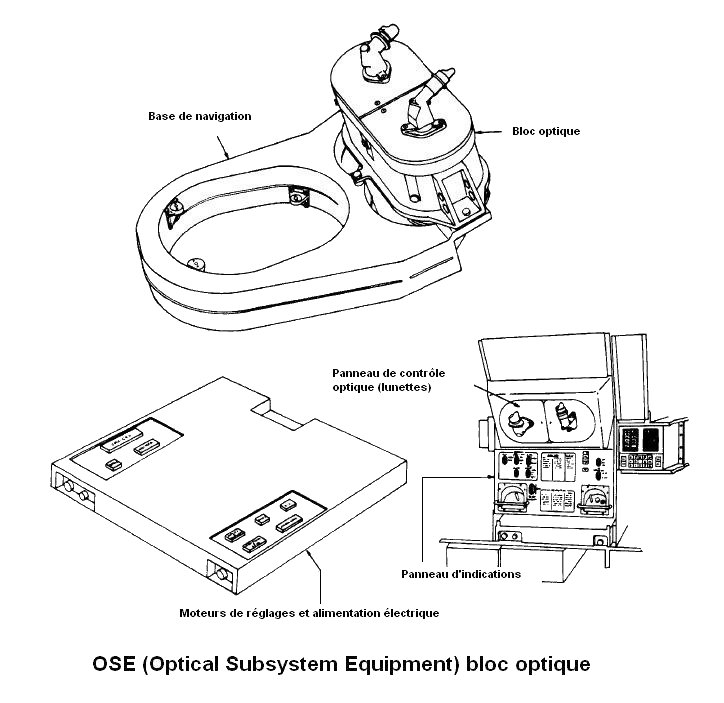
La base de navigation (ou navbase) est un chassis mécanique, où sont montés l'IMU et l'unité optique (sextant, télescope). Ceux-ci sont fixés rigidement à cette structure et alignés avec précision sur celle-ci. Elle est fabriquée par rivetage et collage de panneaux préformés en tôle d'alliage d'aluminium anodisé. L'ensemble ainsi obtenu est creux. Il est alors rempli de mousse polyuréthane ce qui lui assure une rigidité parfaite. Les surfaces de montage usinées avec précision garantissent que le plan formé par les supports de l'IMU est à 32° 32' 23'' du plan formé par les supports du bloc optique (OUA). La navbase est positionnée derrière le panneau de la station de navigation avec l'OUA le long de la surface conique du CM. La base de navigation est construite avec un décalage de 20°, elle mesure 68,57 cm de long, 55,87 cm de large, 11,42 cm de haut, pèse 7,89 kg et est installée dans des tolérances précises pour fournir un alignement fin de l'équipement monté dessus.
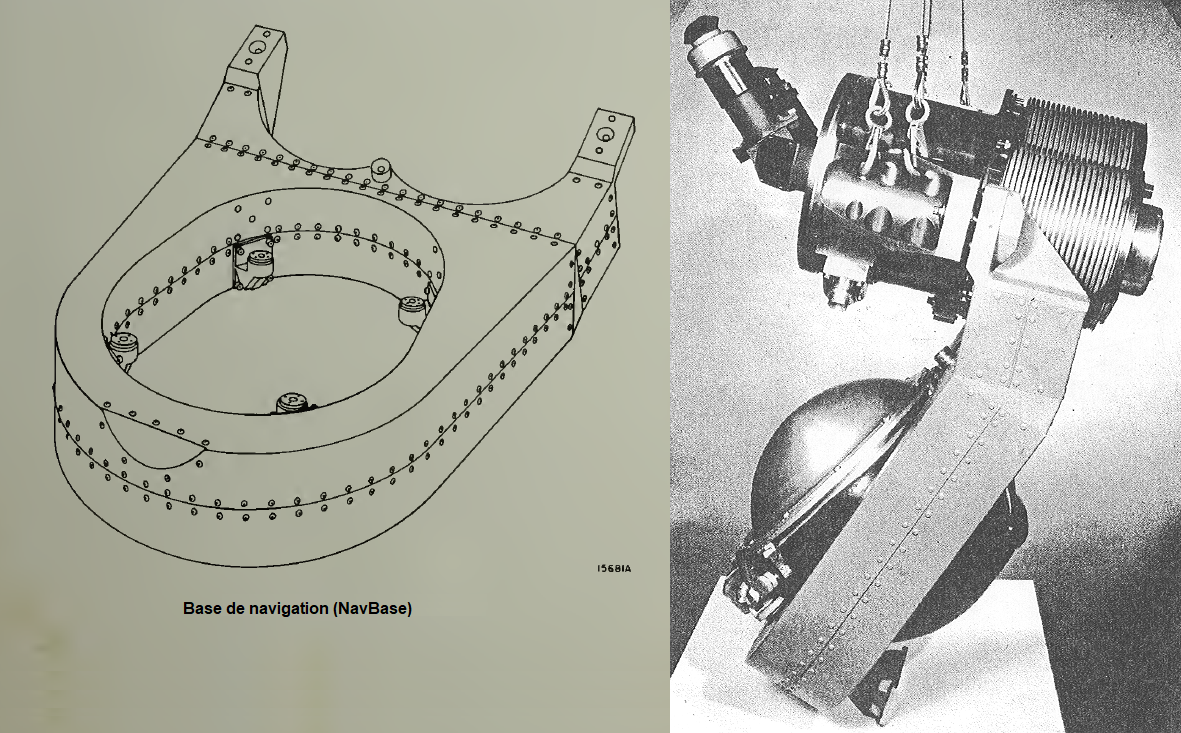 Montage : à gauche schéma de la navbase nue, à droite la navbase équipée du bloc optique et de l'IMU |
 L'ensemble navbase (châssis + IMU + OUA) en place dans la baie d'équipement inférieure du CM d'Apollo 17. On peut y distinguer le second DSKY dans la prénombre à droite. Crédit photo : Collectspace via Mike Acs (Flickr) |
Anecdote : Les concepteurs sont tellement préoccupés par le brouillage possible des communications d'Apollo par les Soviétiques (ou la perte de communications pour toute autre raison technique) qu'ils ont permis aux astronautes de revenir sur Terre par eux-mêmes. En complément du suivi radio au sol, ils pourraient déterminer leurs propres vecteurs d'état avec une visée optique de la Terre et de la Lune. Apollo 8 a testé ces méthodes et a montré qu'elles étaient presque aussi bonnes que le suivi au sol. |
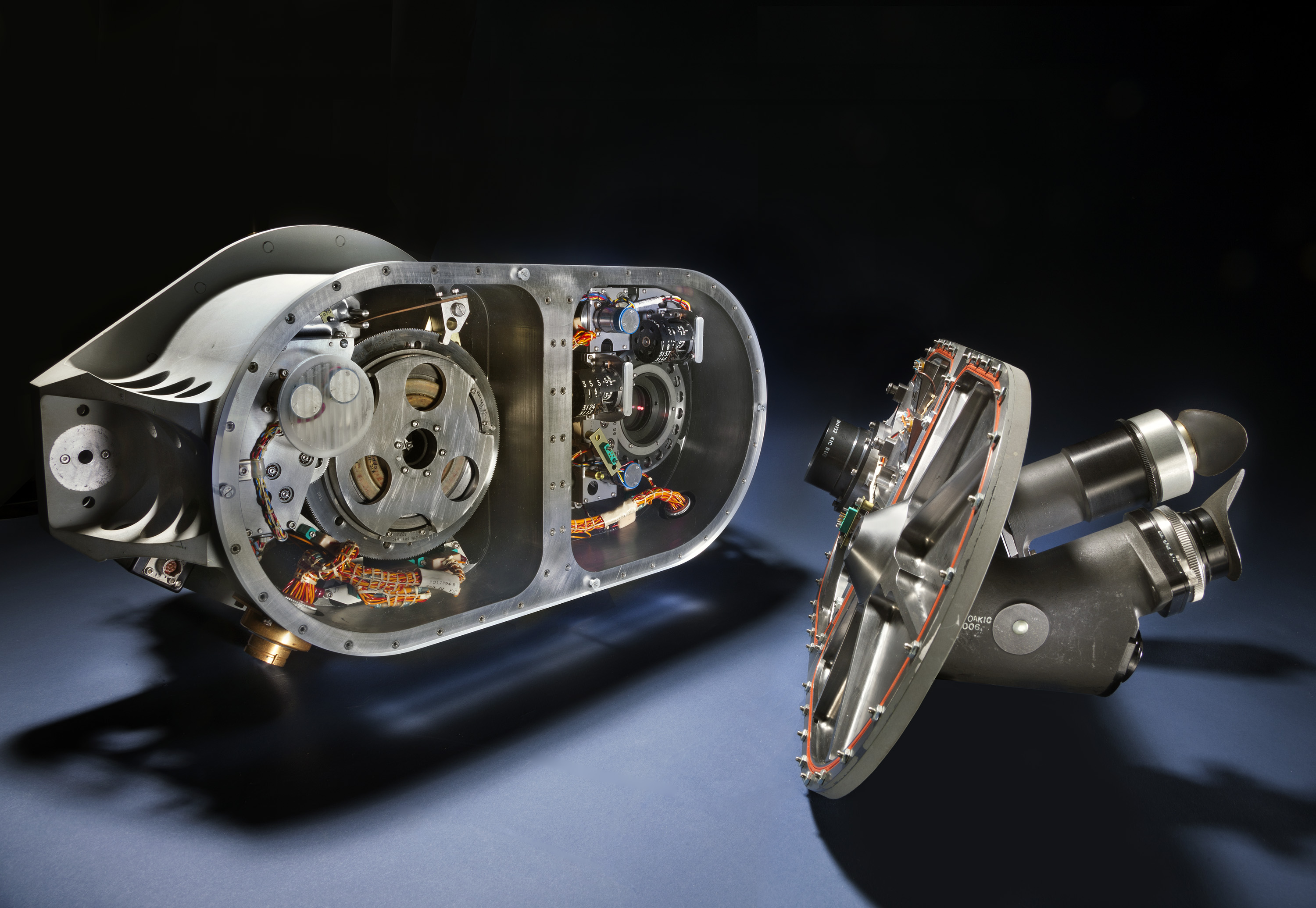
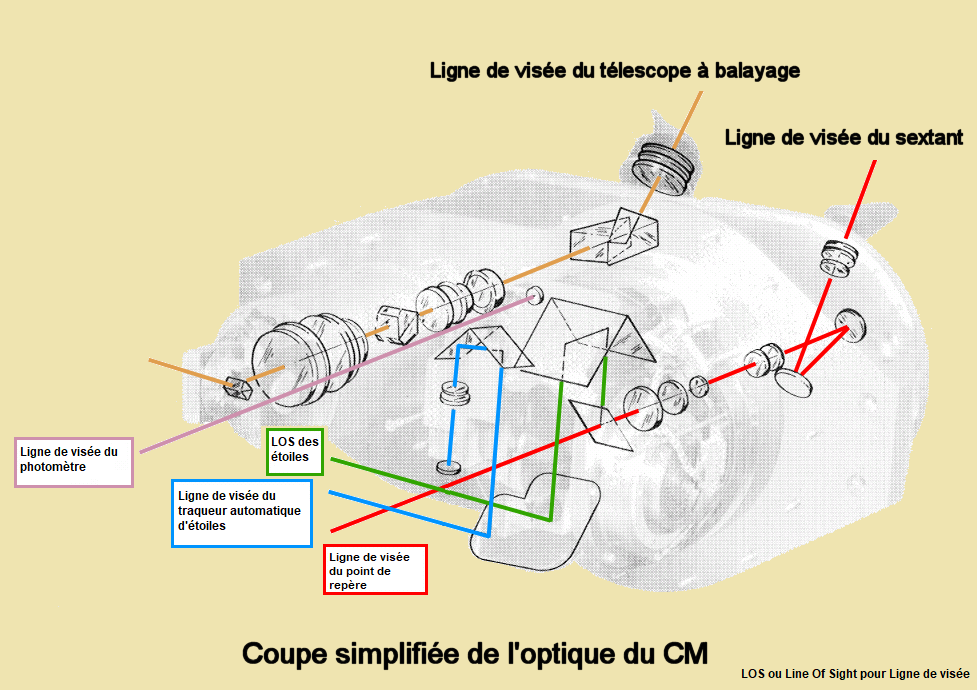
L'OSS (pour Optical Subsystem) permet d'effectuer des observations visuelles directes et d'effectuer des mesures de précision sur des objets célestes à l'aide du télescope à balayage (Scanning Telescope ou SCT) et du sextant (ou SXT). Les données angulaires développées sont transférées par le CDU (Coupling Data Unit) à l'AGC, qui les utilise pour calculer la position et la trajectoire de l'engin spatial. L'OSS est également utilisé pour réaligner la plate-forme de l'IMU, après le décollage, une période d'arrêt, lorsqu'un alignement est nécessaire (correction de trajectoire), ou de connaitre "simplement" l'attitude, le positionnement ainsi que la vitesse du vaisseau Apollo.
Les observations sont accomplies par le pilote du CM par le biais du sextant et du télescope. Le système optique est positionné par des moteurs d'entraînement dirigés par des commandes manuelles électriques. En cas de défaillance de l'électronique, l'astronaute peut actionner le télescope manuellement à l'aide d'un outil universel et lire les angles sur les compteurs mécaniques qui se trouvent au dessus de l'optique de celui-ci. Dans de telles situations d'urgence, l'astronaute calculera, avec l'aide éventuelle du sol, un repère de navigation pour déterminer la position et les corrections de vitesse nécessaires.
 |
 |
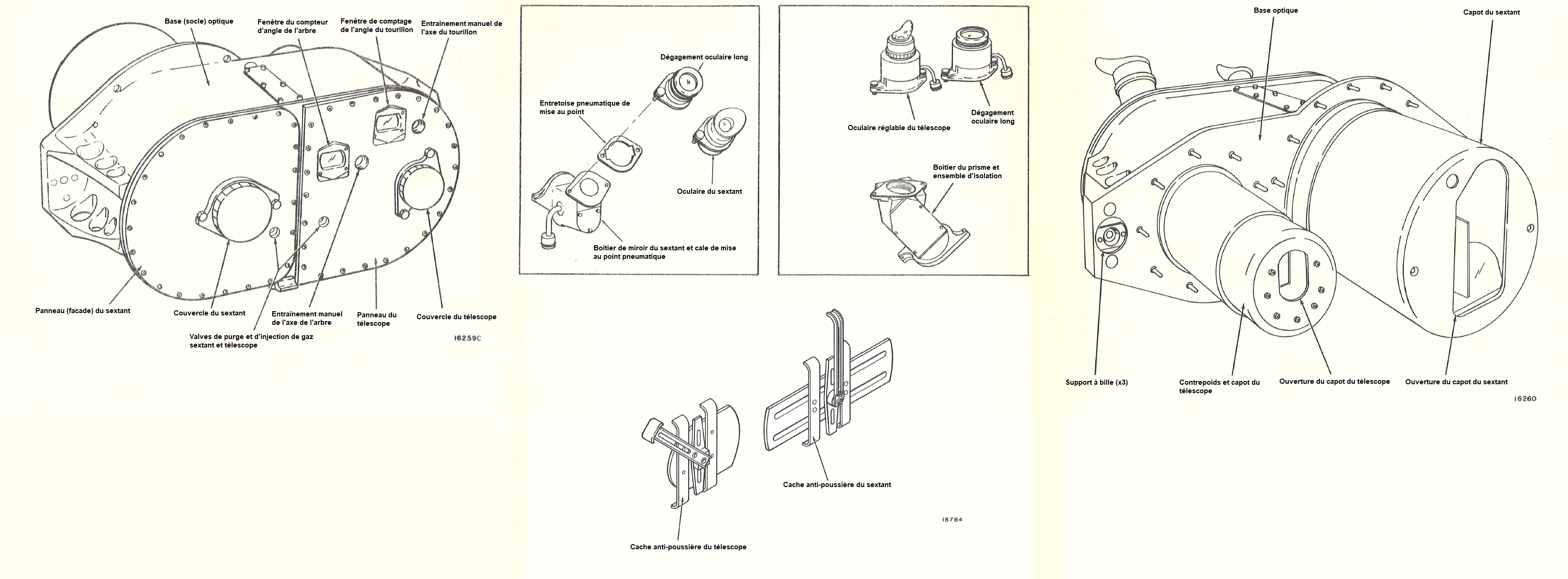
Le télescope et le sextant (les deux formant l'unité optique pour Optical Unit Assembly ou OUA ) sont fabriqués par Kollsman Instrument Corporation. Ils sont montés sur un socle commun. Cette base est montée de manière rigide sur la navbase au-dessus de l'IMU. Trois supports à bille de précision sur la base optique permettent de monter l'OUA sur la base de navigation. Les caches anti-poussière (voir image composée ci-dessus) du sextant et du télescope sont fabriqués en plastique pyrolysé renforcé et sont utilisés pour protéger les optiques des dommages ou de la contamination pendant le lancement et pendant l'éjection du LES (Launch Escape System). Les caches anti-poussière sont montés sur les demi-couronnes et les obturateurs du sextant et du télescope lorsque l'axe de l'arbre optique est à 0° ±15°. La rotation de l'optique autour de l'axe de l'arbre provoque l'éjection des couvercles anti-poussière.
LA BASE OPTIQUE
La base optique, un moulage en béryllium usinée avec précision, sert de support au SCT et au SXT et abrite les composants de commande et d'entraînement de l'axe de l'arbre du SXT et du SCT. Les composants internes de la base sont scellés par les panneaux du SXT et du SCT, qui servent également de support à leurs oculaires. Les compteurs d'angle mécanique de l'arbre et du tourillon du SCT sont situés dans le panneau du SCT. Ce panneau est équipé d'adaptateurs permettant le positionnement manuel des axes du tourillon et de l'arbre du SCT en cas de défaillance de la boucle de postionnement asservie. Toutes les surfaces en béryllium qui sont directement exposées à l'atmosphère de la cabine de l'engin spatial sont peintes et/ou anodisées pour empêcher l'oxydation.
 Vue des composants internes avec les panneaux du SXT et du SCT enlevés |
 Un technicien en optique de l'usine Kollsman Instrument Corporation de Syosset, dans l'État de New York, place le couvercle sur la tête du sextant qui fait partie du sextant-télescope Kollsman que les astronautes d'Apollo 8 utiliseront pour s'assurer de la précision du système de guidage et de navigation du vaisseau spatial lors de son voyage sur la Lune à la fin du mois de décembre 1968. Le petit instrument à droite est le télescope à balayage. Les deux instruments constituent l'ensemble de l'unité optique qui s'insère dans la paroi du CM |
LE TÉLESCOPE
Le télescope est une unité optique de type réfraction fournissant approximativement un champ visuel instantané de 60°, il n'a pas de grossissement et a une précision de mesure angulaire de 4 minutes d'arc. Il est capable de modifier la ligne de visée (LOS pour Line-Of-Sight) du champ de vision. Le large champ de vision du télescope à balayage est utilisé pour l'observation générale des étoiles et la reconnaissance des corps cibles pour les réglages et mesures de visée. De plus, il est utilisé pour suivre des points de repère pendant les orbites terrestres et lunaires avant l'utilisation du sextant. Le télescope possède deux axes de liberté de rotation, définis comme l'axe de l'arbre et l'axe du tourillon. La rotation autour de l'axe de l'arbre définit les incréments du mouvement angulaire de l'arbre (As). La rotation autour de l'axe du tourillon définit les incréments du mouvement angulaire du tourillon (At). Le tourillon et l'arbre sont entraînés en rotation par des servos séparés, chacun commandés depuis le sextant. Le télescope est capable de balayer une zone d'observation conique de 110°.
Le télescope contient une tête optique, un tube télescopique extérieur rotatif, un tube télescopique intérieur fixe, un boîtier de prisme d'oculaire et un oculaire à mise au point réglable. La tête optique contient un double prisme colombe et une monture, une monture, un support, un came/suiveur et un ressort, ainsi qu'un arbre à vis sans fin à tourillon. Le tube télescopique extérieur contient l'objectif et le réticule. La partie télescope de la base optique contient les composants des boucles de l'arbre et du tourillon (moteurs-générateurs, trains d'engrenages, résolveurs et compteurs mécaniques) et l'ensemble boîtier et lampe. Le panneau du télescope est fixé à la base optique et contient des fenêtres pour exposer les compteurs mécaniques de l'arbre et du tourillon, les adaptateurs d'entrée pour la commande manuelle des trains d'engrenages, le boîtier du prisme de l'oculaire et la valve d'injection de gaz.
L'élément principal du télescope est un prisme de Pechan, monté dans l'assemblage de la tête. Le prisme, positionné autour des deux axes interprétés comme As et At (voir description plus haut), introduit l'image cible dans le système optique du télescope. Mécaniquement, ceci est accompli par la rotation, à travers un différentiel, de l'ensemble de la tête et l'entraînement du prisme sur son support. Un système d'engrenage différentiel permet le positionnement indépendant de As et At qui, à son tour, permet à la ligne de mire établie à travers le prisme de se déplacer dans les limites suivantes : 0° (parallèle à l'axe de l'arbre) à ±60° à l'élévation de At, 360° illimités en As. Lorsque le télescope est asservi au sextant, la rotation est limitée à 270° en raison des butées le long de l'axe de l'arbre du sextant. En raison des obstructions créées par la limitation de l'ouverture dans la coque de l'engin spatial, la ligne de mire le long de l'axe du tourillon a une portée utile d'environ 58°. Par conséquent, le champ maximal global qui peut être observé en faisant tourner le tourillon et l'arbre dans leurs limites respectives est de 116°. Le contrôleur manuel de l'optique commande les taux d'entraînement de l'arbre et du tourillon. Les taux d'entraînement sont intégrés par les servos du sextant qui positionnent la ligne de mire du télescope.
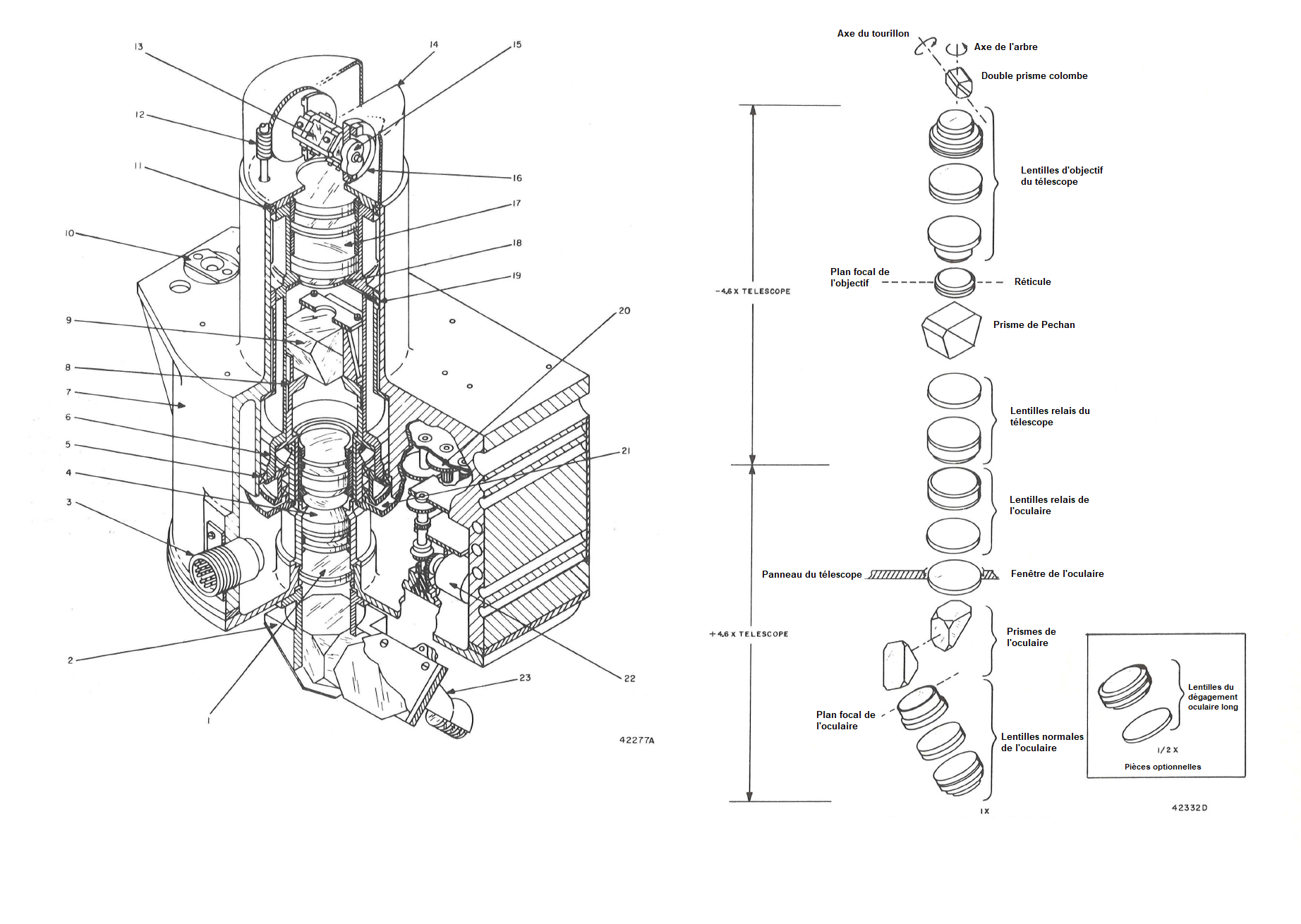
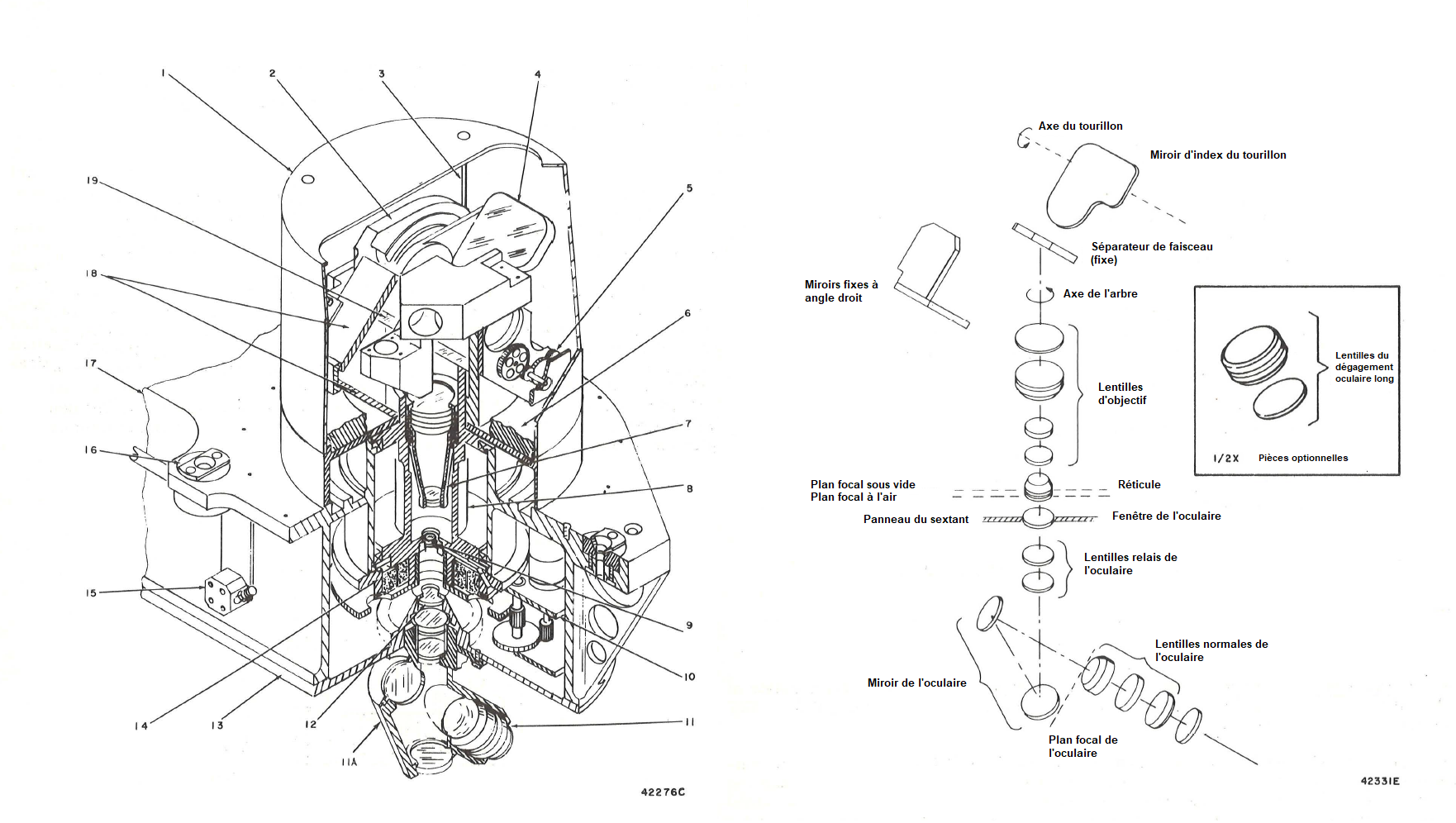
LE SEXTANT
Le sextant est un instrument électro-optique de haute précision. Il a un oculaire qui fournit un grossissement jusqu'à X 28, un champ de vision de 1,8°. Il est capable de viser deux cibles célestes simultanément et de mesurer l'angle qui les sépare avec une précision de 10 secondes d'arc. Ces deux lignes de visée permettent aux deux objets vus d'être en surimpression.
Il se compose d'un miroir d'index et d'une monture, de miroirs à angle droit, d'un séparateur de faisceau, de lentilles de télescope et d'un oculaire. Le miroir d'index est fabriqué en béryllium traité thermiquement et recouvert d'un revêtement réfléchissant. Il est utilisé pour capter et diriger l'image de l'étoile cible sur les miroirs à angle droit. Le miroir d'index est monté dans l'ensemble de montage du miroir de la tête du sextant. L'ensemble tourne sur des roulements à billes de précision dans l'axe du tourillon et est équipé de contrepoids pour maintenir l'équilibre dans n'importe quelle position. Pour chaque degré de mouvement du miroir d'index, la StLOS se déplace de deux degrés (lire plus bas).
- la première ligne de visée, appelé LLOS (Landmark Line Of Sight pour ligne de visée du point de repère) est fixe le long de l'axe de pénétration de la surface conique locale du vaisseau spatial. Cette ligne est associée au côté Terre ou Lune de l'angle de navigation. La LLOS est positionnée par changements d'attitude de l'ensemble du vaisseau spatial.
- l'autre ligne de visée, la star LOS (Star Line Of Sight ou encore StLOS pour ligne de visée des étoiles), possède deux degrés de liberté en rotation autour de l'axe de l'arbre et du tourillon. La variation autour de l'axe du tourillon est représentée par le mouvement d'un miroir d'index. Le positionnement de la StLOS est contrôlé par des circuits d'intégration électromécaniques composés de servos, de tachymètres et de l'électronique associée. La commande des servos est déterminée par des modes de fonctionnement qui sont sélectionnés à l'aide d'interrupteurs sur le panneau de commande. Le mouvement de la StLOS est indépendant de la LLOS fixe, elle peut être déplacée jusqu'à 67° par rapport à la ligne de visée fixe. Cette ligne de visée associée à l'étoile de référence est séparée de la première et inclinée par un miroir articulé de telle manière que l'angle de navigation puisse être mesuré dans n'importe quel plan. Les mesures sont effectuées en commençant par viser dans l'oculaire du sextant et en ajustant l'attitude du vaisseau spatial jusqu'à ce que l'image LLOS soit centrée sur le réticule du sextant. Le positionnement ultérieur de la StLOS pour placer l'image de l'étoile en coïncidence avec la LLOS est effectué pour satisfaire aux exigences nécessaires à la prise de mesures entre les deux images. (La coïncidence doit être aussi proche que possible du centre du réticule). Les précisions de positionnement des axes du tourillon et de l'arbre du sextant sont respectivement de 10 et 40 secondes d'arc.
 |
 |
 Casier de rangement des oculaires |
L'unité de rangement des oculaires abrite et protège les oculaires réguliers, les boîtiers de prisme et de miroir et les dégagements oculaires longs lorsqu'ils ne sont pas installés sur l'OUA. Ce rangement mesure environ 16 cm (6,31 in) de haut, 54 cm (21,4 in) de large et 23 cm (9,12 in) de profondeur. Trois fiches faisceau montées sur le support de connexion de cette unité fournissent le courant de chauffage de l'oculaire. Les encoches pour les câbles chauffants des oculaires se trouvent au-dessus du support de connexion et permettent aux oculaires d'être solidement installés dans l'unité de stockage avec le couvercle fermé pendant que le courant de chauffage est appliqué. Ce placard est situé directement au-dessus du carénage optique. Au début, L'unité de stockage est fabriquée à partir d'une feuille de plastique ABS, les ingénieurs changèrent le matériau par de l'aluminium à la suite d'une étude d'inflammabilité.
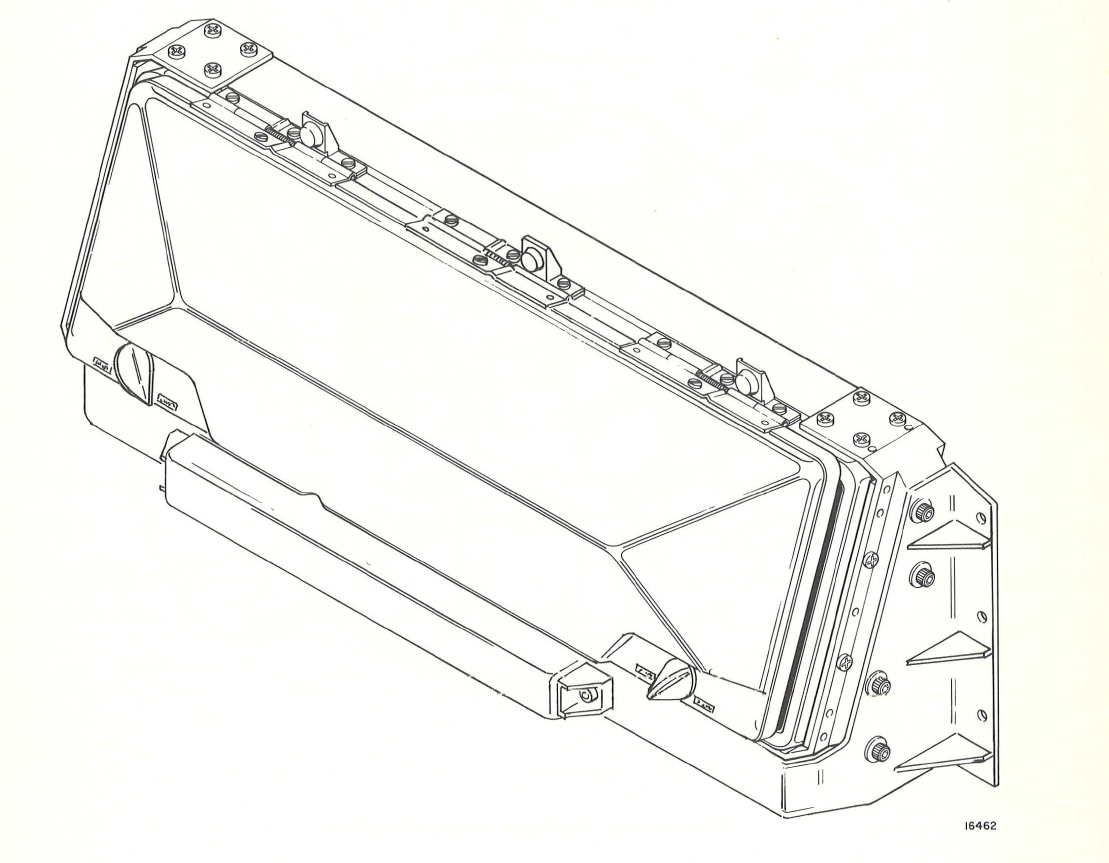
La conception de l'optique du CM n'est pas une tâche évidente, car elle doit être construite de manière à ne pas compromettre l'intégrité du bouclier thermique (la sortie optique se situe dans la partie du bouclier la plus chauffée). À l'origine, le CM devait disposer d'une optique déployable, mais les ingénieurs de North America ont été horrifiés par la possibilité que ce système ne puisse pas être rétracté pendant la rentrée atmosphérique.
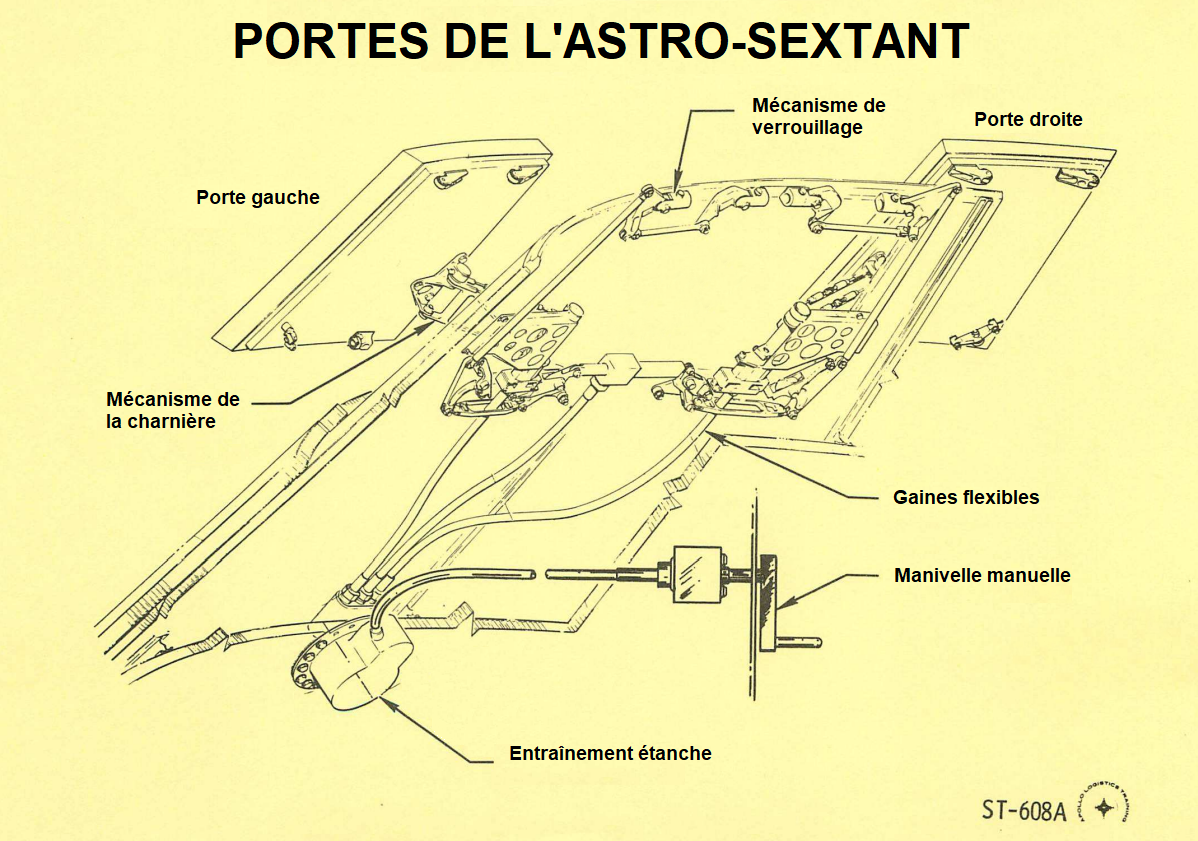 |
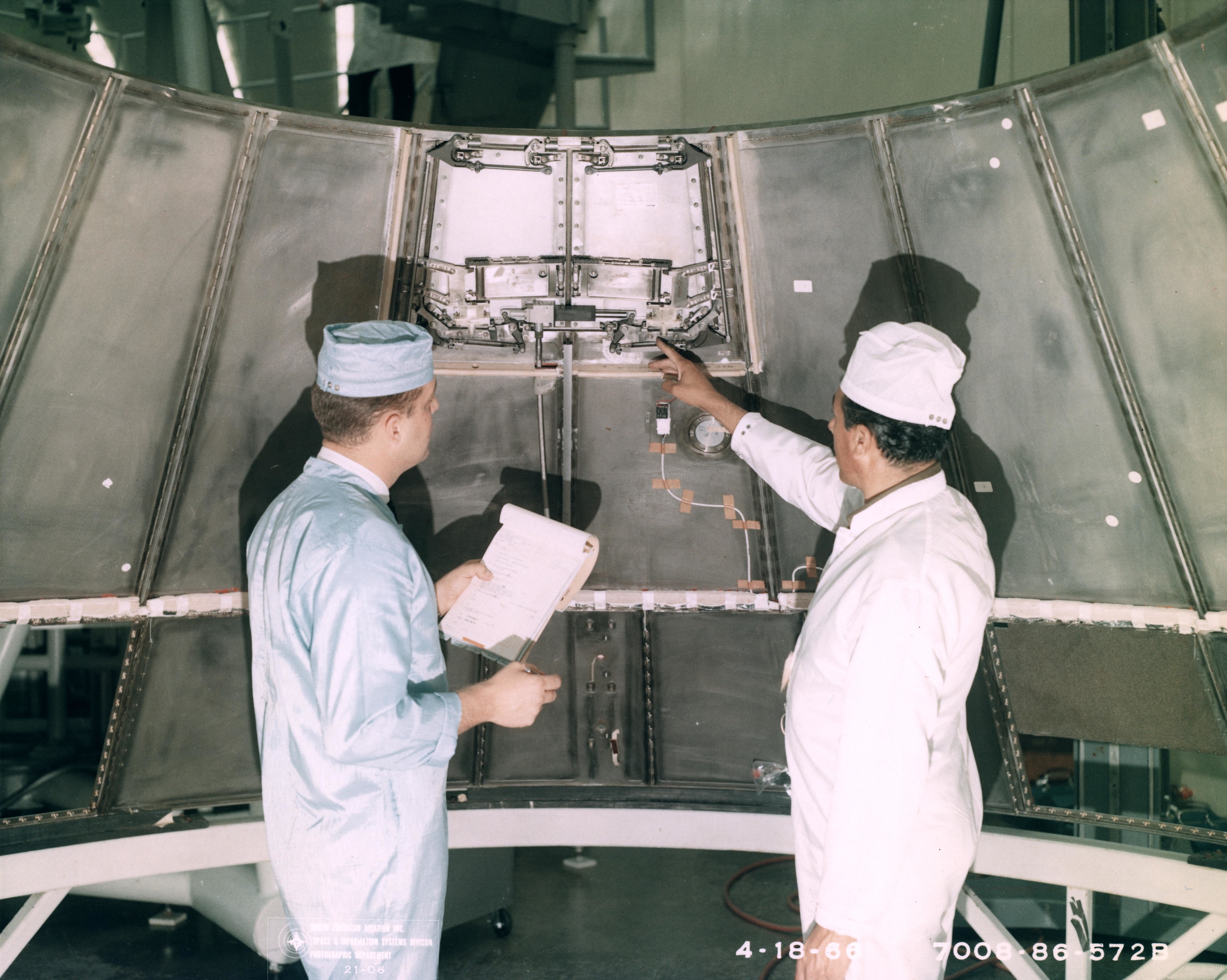 Système d’ouverture à double porte envisagé pour le bloc optique du CM Block I, photo de Drew Granston |
Un facteur supplémentaire de complications est que les objectifs optiques se trouvent dans le vide spatial, tandis que les oculaires se situent dans la cabine pressurisée. La force totale de cette pression est d'environ 3 500 Newtons (356,9 kg) et nécessite un examen attentif de l'emplacement du centre de force par rapport aux supports. Le mouvement relatif est pris en charge par un soufflet métallique à double paroi qui assure l'étanchéité de la pression de la cabine.
L'utilisation du bloc optique est assez simple :
- un membre d'équipage (généralement, le CMP) observe une étoile connue en manœuvrant le télescope ainsi que le sextant. Une fois satisfait des images obtenues, il envoie ensuite un signal à l'AGC.
Il observe cette même étoile quelques instants plus tard, renvoie à nouveau un signal, et recommence l'opération avec une seconde étoile. L'AGC mesure la différence d'angle observée entre l'OCDU (Optical Coupling Data Units) et des senseurs placé sur le sextant, le temps et compare les résultats pour finalement rétablir l'orientation de la plate-forme, ou simplement mesurer la vitesse et la position exacte du vaisseau.
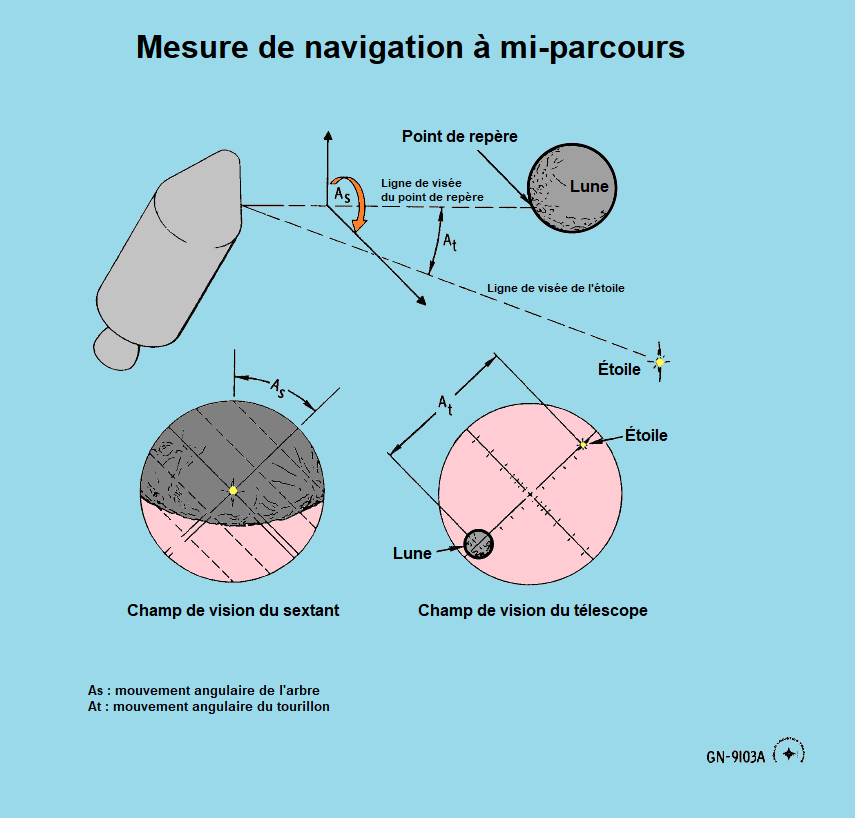 Procédure typique de mesure au sextant du CM : La tâche des astronautes est a) de contrôler l'orientation du vaisseau spatial de manière à ce que la Terre ou la Lune se trouve de façon satisfaisante dans le champ de vision du télescope. b) Puis d'ajuster le miroir et le plan de mesure pour obtenir l'image de l'étoile superposée dans sa vue sur l'élément terrestre ou lunaire sélectionné |
 |
C'est la mission Apollo 8 qui teste le système embarqué jusqu’à ses limites. James Lovell en est le principal navigateur, bien que les autres astronautes, Frank Borman et William Anders, ont été formés à l’utilisation du système. Lorsque l'engin spatial quitte l'orbite terrestre, Lovell a du mal à obtenir des lectures précises. Il lui est, en effet, difficile de distinguer les étoiles des morceaux de glace et autres petites particules entourant le module de commande. Lorsque les astronautes se dirigent vers la Lune, ils ne sont jamais plongés dans une obscurité absolue. Faire le point a été difficile en raison de l'atmosphère de la planète, bien que les astronautes aient suivi une formation approfondie au laboratoire d'instrumentation pour apprendre à reconnaître un point de l'horizon sur lequel ils pourraient revenir de manière cohérente.
Côté positif, la correction de la dérive gyroscopique est relativement simple. L'astronaute saisit le code de l'étoile dans l'ordinateur, lequel effectue à son tour la rotation du vaisseau spatial jusqu'à ce que cette étoile apparaisse dans le réticule du télescope. La mesure dans laquelle une étoile est décentrée indique le degré de dérive. L'astronaute manipule l'optique jusqu'à ce que l'étoile soit centrée, puis appuie sur un bouton et l'ordinateur réaligne les gyroscopes.
Le deuxième jour, Lovell fait des lectures beaucoup plus précises. Malgré sa mémoire extrêmement limitée comparée aux ordinateurs modernes, l’AGC est capable de prendre les lectures de Lovell et de les traduire en données de position et de vitesse précises. La position et la vitesse calculées à bord étant en parfait accord avec ce qui a été calculé au sol, les astronautes sont confiant dans le fait de pouvoir passer en toute sécurité près de la Lune sans l’impacter. Il s’agit d’une réelle préoccupation, car les plans de la mission prévoient d'établir une orbite à 111 km au-dessus de la face cachée de la Lune, où ils ne seront plus en contact radio avec le centre de contrôle. Si leurs calculs sont erronés de quelques pour cent, ils peuvent alors se trouver sur une trajectoire de collision avec la face cachée de la Lune, les contrôleurs au sol ne pouvant pas les aider. Le système fonctionna également bien au retour, contrôlant la combustion qui entraîne les astronautes hors de l'orbite lunaire sur une trajectoire de retour sur Terre, alignant le module de commande sur un angle précis pour pénétrer dans l'atmosphère terrestre.
L'AGC affiche également l'attitude en temps réel du vaisseau Apollo par l'intermédiaire du Flight Director Attitude Indicator (FDAI ou indicateur d'attitude, au nombre de deux). Il affiche le déplacement du vaisseau sur ses trois axes, roulis, tangage et lacet, et en même temps la correction d'attitude nécessaire. L'attitude affichée correspond à la combinaison des données venant des paramètres provenant de l'IMU ou bien du mode GDC (Gyro Display Coupler). Ce dernier permet d'afficher l'attitude du vaisseau par rapport à une attitude choisie par l'équipage et fixée par l'intermédiaire de switches sur le tableau de bord principal. Lorsque les senseurs détectent une variation dans l'attitude du vaisseau, un signal est envoyé à L'AGC, qui active le quad RCS permettant de restituer l'attitude désirée.
LE SCS (STABILIZATION &CONTROL SYSTEM)
Rôle
Le SCS (Stabilization and Control System ou SCS) constitue un système analogique de secours pour le contrôle de vol du vaisseau spatial Apollo. Le système principal, le PGNCS, est un système numérique. Le SCS sert d’interface électrique entre les signaux de commande et les dispositifs de propulsion du vaisseau, en particulier le moteur principal (SPS) et les propulseurs du système de contrôle d’attitude (RCS), tout en fournissant des indications visuelles des paramètres de pilotage. En mode manuel, il permet également une liaison directe entre les commandes de l’astronaute et l’ordinateur de bord du PGNCS. En tant que système de secours, le SCS est capable d’assurer toutes les fonctions de contrôle de vol du PGNCS, à l’exception des manœuvres automatiques d’orientation.
Le SCS détecte les trois taux de rotation du corps du véhicule, utilisés à des fins de contrôle et d’affichage ; il génère et utilise les trois attitudes du véhicule ; affiche visuellement ces paramètres ainsi que les erreurs associées ; assure le contrôle direct et l’affichage des positions de cardan en tangage et en lacet du moteur SPS ; permet la définition et l’affichage de l’orientation angulaire désirée du véhicule ; et utilise les commandes de rotation et de translation du vaisseau. Lorsqu’il est utilisé comme système de contrôle de vol de secours, le SCS traite (par sommation, gains, etc.) tous les signaux nécessaires pour assurer le contrôle complet du véhicule spatial.
Le système de stabilisation et de contrôle se compose de trois éléments principaux : le sous-système de référence d’attitude, les commandes et affichages, et l’électronique de contrôle de vol.
La capacité de référence inertielle de secours pour le contrôle de vol est assurée par six gyroscopes d’attitude montés sur la structure du vaisseau (BMAG). Trois d’entre eux sont utilisés pour fournir les informations d’attitude, et trois autres en mode taux pour détecter la vitesse angulaire du vaisseau spatial.
Des coupleurs électroniques convertissent les informations issues des BMAG, exprimées dans le repère du corps du vaisseau, en angles d’Euler affichés à l’équipage.
Chaque mode de contrôle de vol — à savoir : le mode de contrôle du vecteur de poussée, le mode d’attitude, et le mode de contrôle pour la rentrée — dispose à la fois d’un mode automatique et d’un mode manuel de fonctionnement.
Les signaux d’entrée transmis à l’électronique pour ces modes de contrôle de vol proviennent du système de référence d’attitude.
Les mouvements du module de commande et de service (CSM) sont réalisés via l’électronique de contrôle de vol et le manche rotatif (rotational hand controller), sous le contrôle de l’équipage, en utilisant :
- le moteur principal du module de service (SPS), d’une poussée d'environ 89 kN (20 000 lb), pour le contrôle du vecteur de poussée,
- seize moteurs de réaction d'environ 445 N (100 lb) de poussée pour le contrôle d’attitude,
- et douze moteurs d'environ 445 N (100 lb) de poussée pendant la phase de rentrée.
L’affichage de la vitesse angulaire (rate) et de l’erreur d’attitude du vaisseau spatial (module de commande et module de service) est assuré par une paire d’indicateurs d’attitude du directeur de vol (Flight Director Attitude Indicators, ou FDAI).
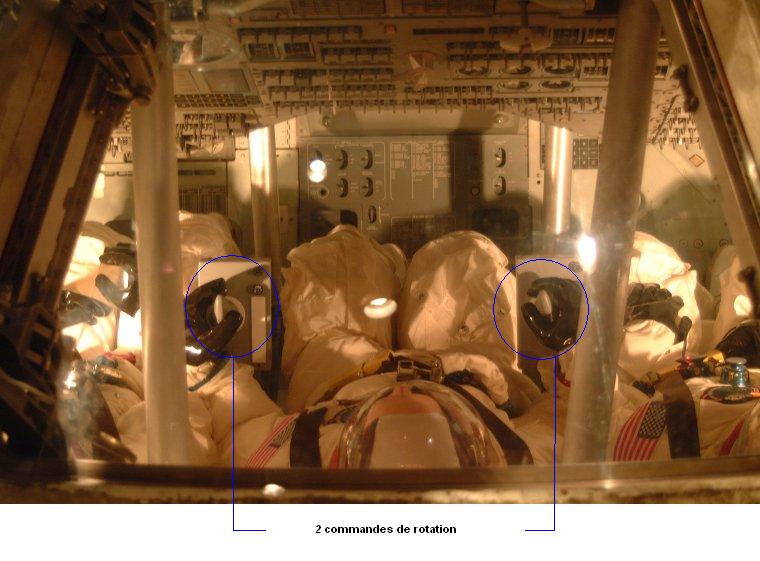
Deux manches de commande sont disponibles pour piloter la rotation du vaisseau, et un autre manche est dédié au contrôle en translation.
Le contrôle et l’affichage de l’orientation des cardans du moteur principal du module de service (SPS) sont également assurés.
Anecdote : les exigences du SCS comprenaient initialement trois domaines principaux : la référence d'attitude, les affichages et les commandes (y compris le contrôle automatique du vecteur de poussée) et le contrôle de la réaction. Après des simulations approfondies, le contrôle manuel du vecteur de poussée a été ajouté. |
Le SCS s'interface avec les sous-systèmes suivants :
• Sous-système de télécommunications : reçoit toutes les données télémétriques de la liaison descendante du SCS.
• Sous-système d'alimentation électrique : fournit l’énergie électrique principale nécessaire au fonctionnement du SCS.
• Sous-système de contrôle de l'environnement : assure l’évacuation de la chaleur générée par l’électronique du SCS.
• Sous-système de contrôle des événements séquentiels : gère la commutation d’interruption et l’activation de la séparation des commandes RCS associées au SCS via le SECS. Il reçoit également le signal de fermeture manuelle du commutateur d’interruption du SCS.
• Système de référence verticale locale (via FDAI) Une interface électronique — notamment l’unité ORDEAL — connectée entre l’électronique d’affichage et l’axe de tangage des Flight Director Attitude Indicators (FDAI) permet l’affichage d’une attitude locale verticale (horizon lunaire ou terrestre). En usage normal, les FDAI peuvent afficher soit une référence inertielle (IMU), soit une référence interne GDC ; l’ORDEAL introduit une référence localement verticale pour les phases orbitales.
• Sous-système de guidage, de navigation et de contrôle :
- fournit au SCS les signaux d'attitude totale et d'erreur d'attitude en roulis, tangage et lacet pour l'affichage à l'équipage ;
- transmet les commandes marche/arrêt des moteurs RCS pour le contrôle d’attitude ;
- transmet au SCS les commandes de servomoteurs de vecteur de poussée (TVC) pour le contrôle automatique du moteur SPS ;
- fournit les commandes d’allumage et d’extinction automatique du SPS au SCS dans le cadre du contrôle de ΔV ;
- reçoit du SCS les signaux de fermeture des interrupteurs de commande manuelle en translation et en rotation.
• Sous-système de contrôle de rentrée (Entry Monitoring System – EMS) : fournit au SCS des signaux discrets logiques de mise en marche ou d’arrêt du moteur principal SPS, utilisés dans la logique de commande du SCS pour activer ou désactiver la poussée.
• Sous-système de propulsion : le moteur principal SPS reçoit des commandes d’orientation (vecteur de poussée) ainsi que des ordres d’allumage et d’extinction pouvant provenir soit du PGNCS, soit du SCS ; le système de contrôle de réaction (RCS) reçoit également du SCS des commandes d’allumage/extinction dans les modes manuel ou automatique.
Fonctions de contrôle
Les fonctions de contrôle du SCS sont assurées par le contrôleur de translation, le contrôleur de rotation et le panneau de commande de réglage d'assiette (ASCP pour Attitude Set Control Panel).
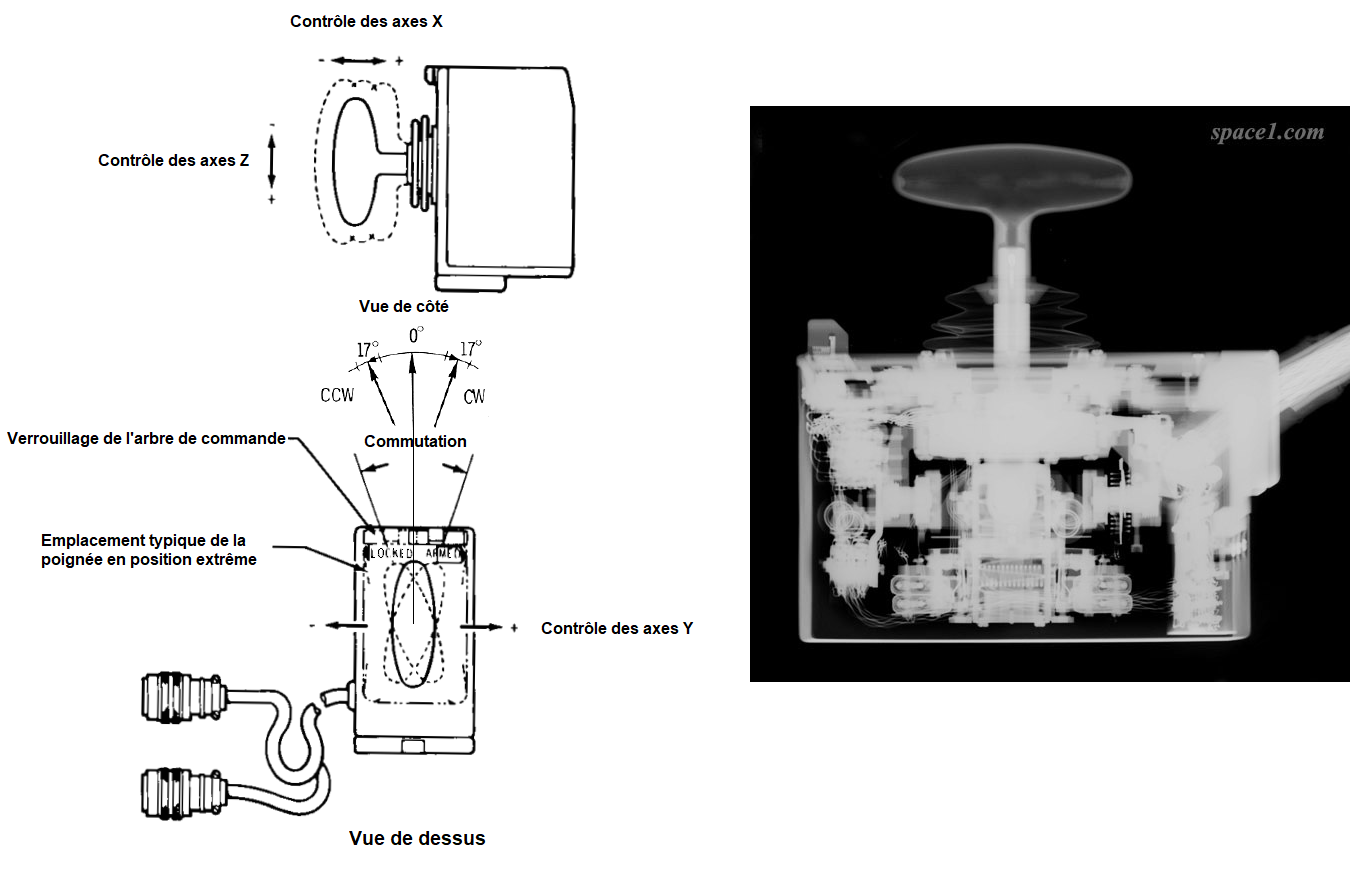
La commande de translation (Translational Hand Controller ou THC) (1) assure le contrôle manuel de l'accélération du mouvement rectiligne du vaisseau spatial (combinaison CSM uniquement) dans les deux directions le long des trois axes principaux..
La commande est montée avec ses axes approximativement parallèles à ceux du vaisseau spatial. L'engin spatial accélère le long de l'axe X par un mouvement de poussée/traction, le long de l'axe Y par un mouvement de gauche à droite et le long de l'axe Z par une commande de haut en bas. |
..(2) lance une commande d'abandon du CSM/Saturn IVB (S-IVB) vers le séquenceur de mission du vaisseau spatial par une rotation dans le sens inverse des aiguilles d'une montre (counterclockwise ou CCW) de la poignée en T, (3) transfère la commande du vecteur poussée (TVC/Thrust-Vector Control) du PGNCS au SCS par une rotation dans le sens des aiguilles d'une montre (clockwise ou CW), et (4) est capable d'actionner simultanément plusieurs axes. Le THC block II est monté sur l'accoudoir gauche du canapé du commandant (CDR) sur un support de montage en queue d'aronde. La commande et son câble pèse 2,7 kg.
 Commande de translation (source photo : Space1.com) |
 |
Anecdote : Dans le film Apollo 13, le contrôleur de translation portait l’inscription « Abort » ainsi qu’une flèche indiquant la direction dans laquelle tourner le contrôleur pour déclencher l’interruption de mission. Ces marquages étaient uniquement destinés à aider le public du film. Le véritable contrôleur ne comporte aucun marquage de ce type. Le commandant sait parfaitement à quoi sert ce contrôleur lors du lancement, et aucun marquage n’est nécessaire!
La commande de rotation (Rotational Hand Controller ou RHC) (1) permet des contrôles manuels proportionnels à trois axes de la vitesse du corps ou de l'accélération angulaire directe (par sélection de commutateur) pour le mouvement de rotation de l'engin spatial dans les deux sens autour des trois axes principaux à partir de l'activation du commutateur de rupture (course de 1,5 ° à partir du neutre) jusqu'à l'arrêt progressif (soft stop 10°), (2) fournit des contrôles d'accélération angulaire d'urgence directement aux solénoïdes du jet RCS par des interrupteurs directs d'urgence du contrôleur (11°), (3) fournit un contrôle manuel proportionnel de la position du cardan du moteur SPS en tangage et en lacet pendant le MTVC, et (4) est capable d'un actionnement multiaxial simultané. Une poignée symétrique, équipée d'un interrupteur à poussoir, est conçue pour une utilisation à gauche ou à droite. Le RHC comporte également un interrupteur "push to talk" (interface du sous-système de communication) qui n'est pas lié au contrôle du véhicule. L'appareillage avec son câble et son connecteur pêse 3,6 kg.
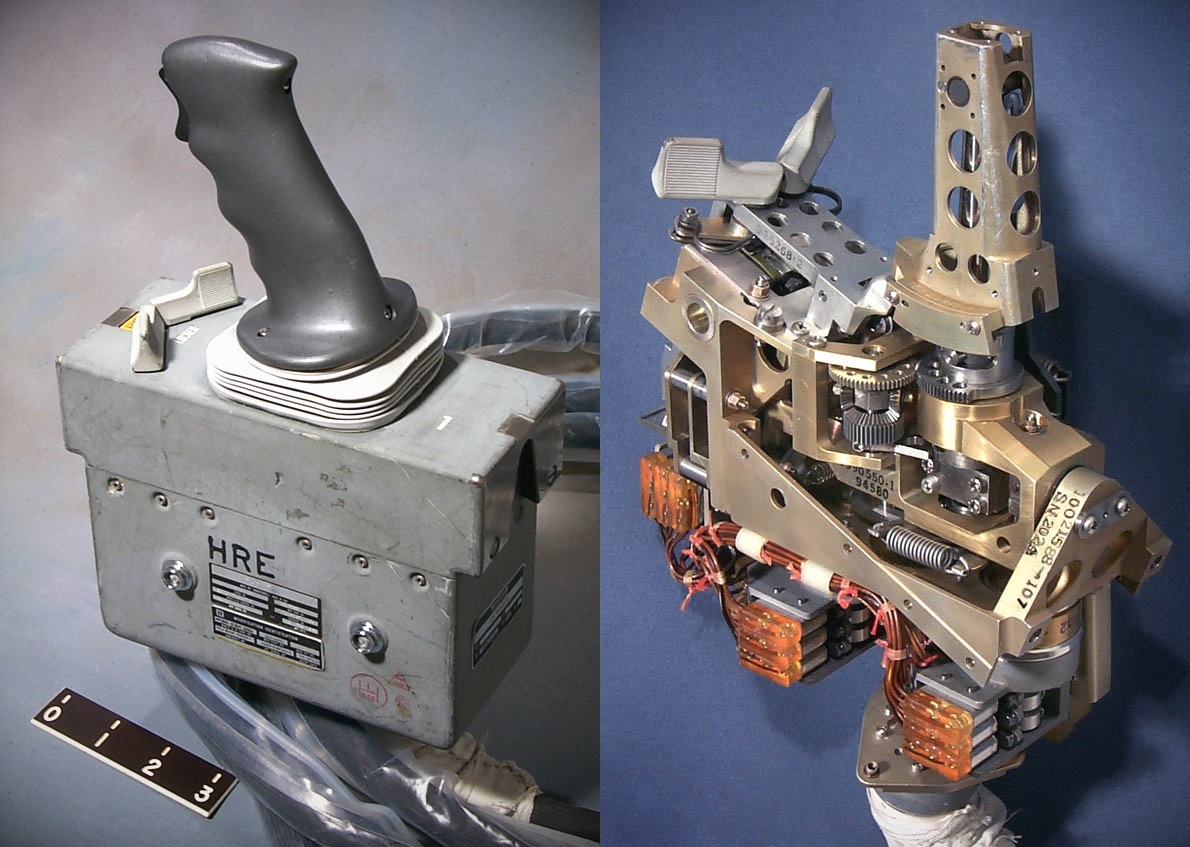 À gauche, RHC complet et à droite, RHC carters et poignée démontés (source photo : Space1.com) |
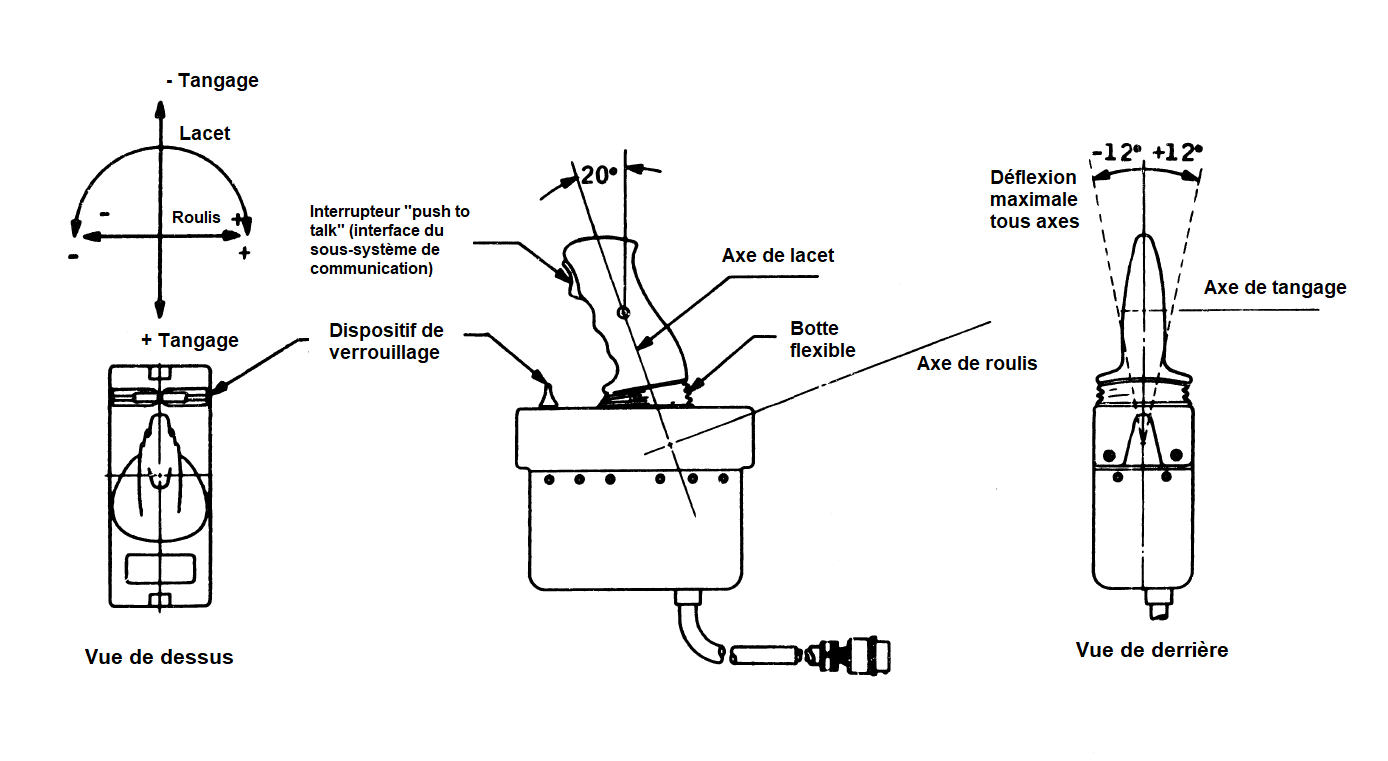 Positions et degrés des mouvements du RHC |
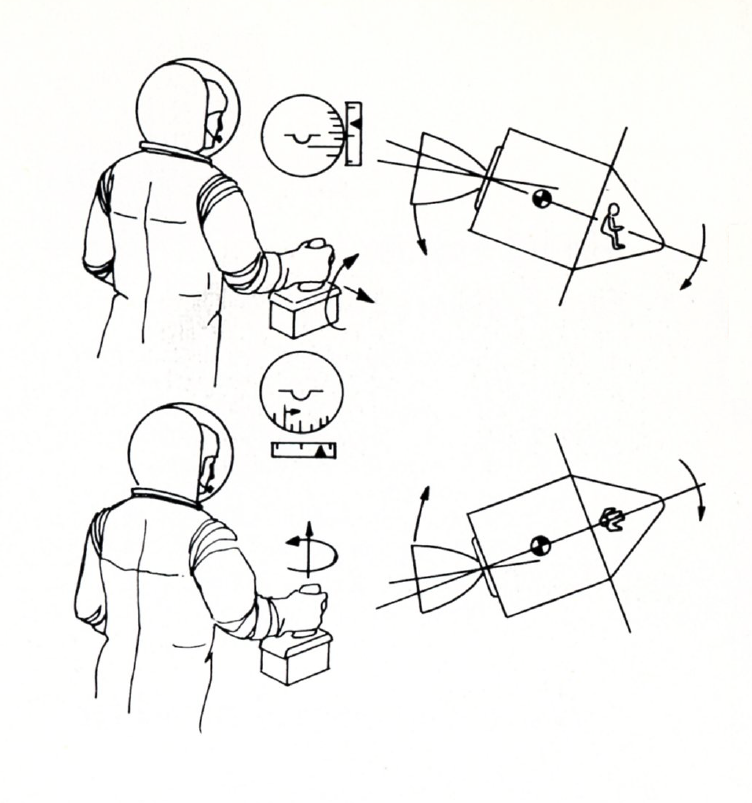 Contrôle manuel proportionnel de la position du cardan du moteur SPS en tangage et en lacet |
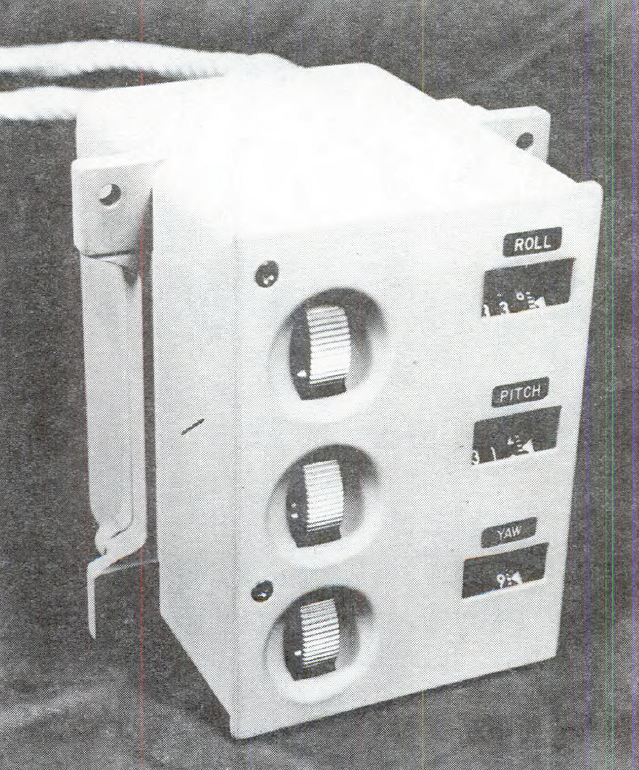
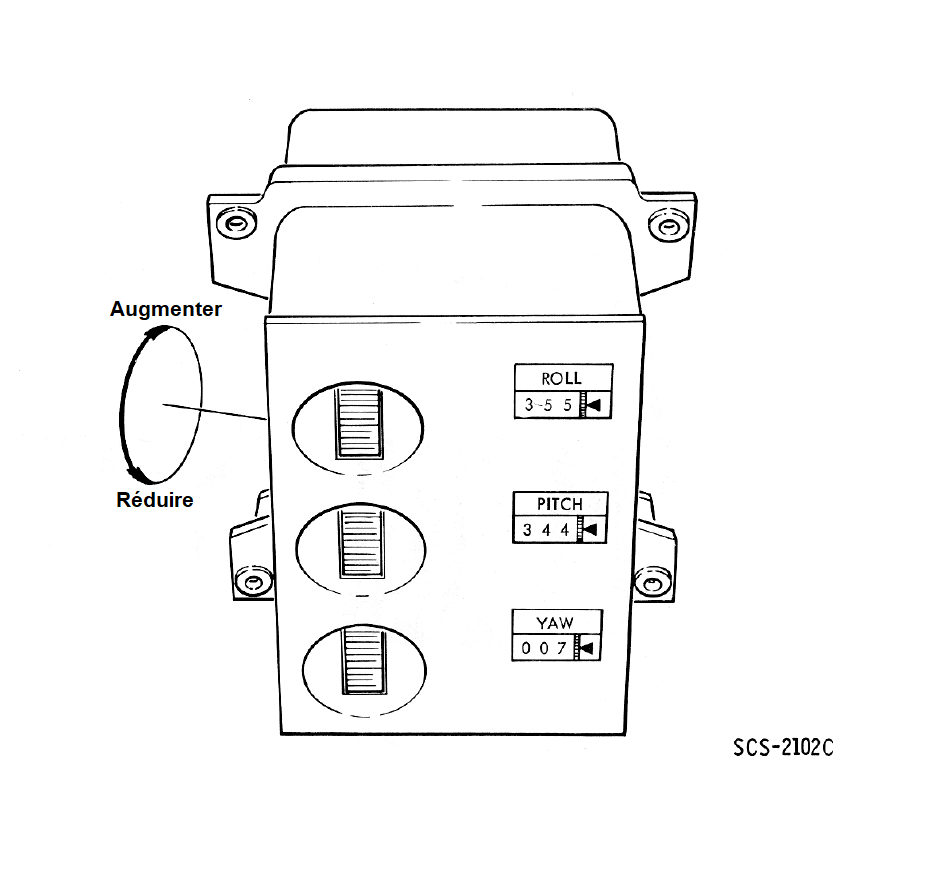
Le panneau de réglage d'attitude (ASCP ou Attitude Set Control Panel) mesure 8,90 par 12,19 par 11,17 cm (3,5 par 4,8 par 4,4 in), pèse 1,53 kg (3 lb 6 oz) et se trouve dans le coin inférieur gauche du MDC, face au commandant. Il comporte trois fenêtres pour afficher le roulis, le tangage et le lacet en degrés et trois molettes à la gauche de ces fenêtres. Le panneau fournit les moyens d'insérer manuellement les informations d'attitude souhaitées dans le système de contrôle de stabilisation sous la forme de trois angles. Il reçoit des signaux qui représentent l'attitude réelle de l'engin spatial par rapport à un référentiel inertiel (fixe) arbitraire. Des signaux de sortie sont fournis, qui représentent l'erreur d'attitude ou la différence entre l'attitude totale réelle et souhaitée de l'engin spatial. Ces signaux peuvent être utilisés pour actionner les aiguilles d'erreur d'attitude sur l'indicateur d'attitude du directeur de vol, fournissant ainsi à l'astronaute une indication visuelle de l'erreur d'attitude du vaisseau spatial et pour aligner le coupleur d'affichage gyroscopique sur un cadre de référence fixe.
L'ASCP comporte des molettes (voir photo et schéma ci-dessous) permettant de positionner des résolveurs pour chacun des trois axes. Les résolveurs sont reliés mécaniquement à des indicateurs pour fournir une lecture des angles composés. Les signaux vers ces résolveurs de réglage d'attitude proviennent de l'IMU ou du coupleur d'affichage gyroscopique. Les compteurs du panneau indiquent les angles des résolveurs en degrés, et permettent une rotation continue de 000 à 359 à 000 sans inversion de sens. Il y a des marques de graduation tous les 0,2°. Le tangage et le roulis sont marqués en continu entre 0 et 359,8°. Le lacet est marqué en continu de 0 à 90° et de 270 à 359,8° ; il est également marqué par des graduations de 0,2° de 270 à 0 à 90° et est numéroté à 180°. Les lectures augmentent pour une rotation vers le haut des molettes. Une révolution de la molette produit une variation de 20° de l'angle du résolveur et une variation correspondante de 20° de la valeur du compteur.
 ASCP ou Attitude-Set Control Panel |
 |
Les fonctions d'affichage du SCS sont assurées par le FD/AI et l'indicateur de position du cardan et de pression de carburant (GP/FPI).
Le FD/AI
 |
 |
 |
 |
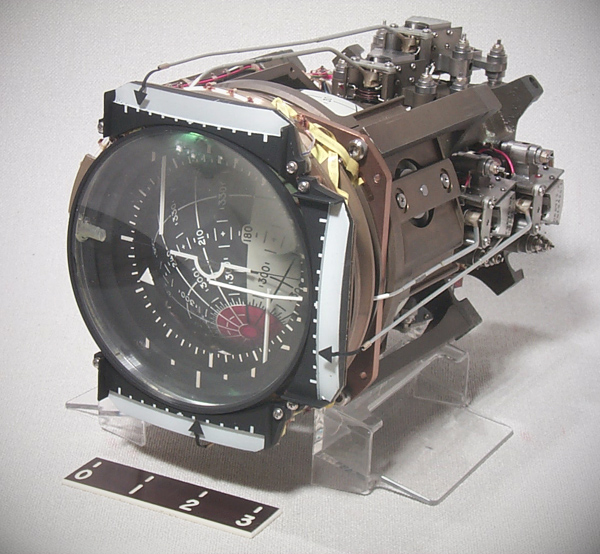
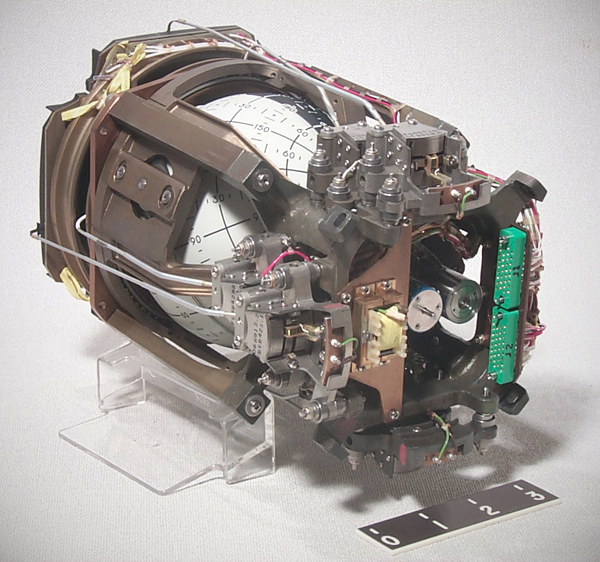
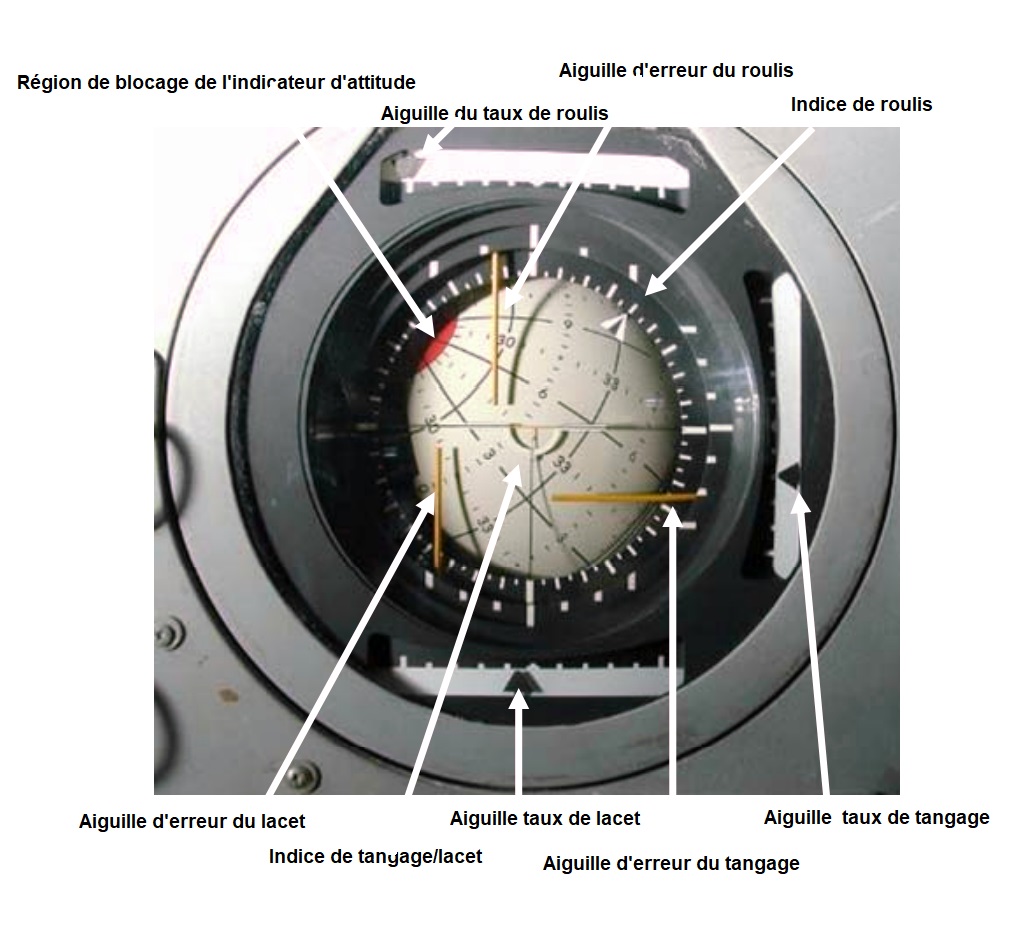
Le FD/AI pour Flight Director/ Attitude Indicator (directeur de vol/indicateur d'attitude ou sphère d'attitude) surnommé "boule de billard n°8" (du fait de sa ressemblance) est un des instruments les plus importants du vaisseau spatial Apollo. Il est fabriqué par Honeywell.
À l'origine, Les concepteurs avaient l'intention de donner à l'équipage trois affichages séparés indiquant les attitudes du vaisseau : un pour le roulis, un pour le tangage et un pour le lacet, mais le concept a été refusé par les astronautes. La moitié supérieure du FDAI est de couleur claire, tandis que la moitié inférieure est noire. Il est également marqué par des zones rouges aux angles de lacet compris entre 270° et 285° et entre 75° et 90°. Ces zones indiquent un blocage imminent de cardan.
Le taux de mouvement dans les trois axes est indiqué par le déplacement de la flèche noire sur les échelles situées en haut, à droite et en bas du FDAI. L'échelle supérieure indique le taux de roulis, l'échelle de droite, le taux de tangage et l'échelle inférieure, le taux de lacet. Les échelles sont marquées en cinquièmes, la valeur de déviation totale dépend de la position du commutateur FDAI-Scale. Les déplacements de vitesse angulaire sont des indications "vol à", c’est-à-dire qu’ils indiquent la direction dans laquelle l’équipage doit actionner les commandes pour ramener à zéro les vitesses de mouvement indiquées.
Le FDAI est typique des instruments utilisés dans l’aviation et les vols spatiaux au cours des années 1960. Dispositif électromécanique, il utilise des signaux électriques analogiques pour conduire des pointeurs (aiguilles) mécaniques et l'affichage principal "boule". Un cadre métallique rigide assure que le mécanisme ne se déforme pas pendant le lancement et le protège des chocs. Il mesure 17, 52 cm (6,9 in) de diamètre, 23,69 cm (9,33 in) de longueur et pèse 4,08 kg (9 lb). Il a une plaque de recouvrement en verre. Les nombreuses pièces mobiles sont très sensibles aux impuretés et aux objets susceptibles de les coincer, en particulier en apesanteur, et l’ensemble de l’instrument est scellé. Assemblés dans des salles blanches et hautement testés, de tels instruments sont extrêmement fiables, mais ont un coût tout aussi élevé.
L'attitude affichée correspond à la combinaison des données venant de deux sources : les paramètres provenant de l'IMU et du mode GDC (Gyro Display Coupler). Ce mode GDC permet d'afficher l'attitude du vaisseau par rapport à une attitude choisie par l'équipage.
Lorsque les senseurs détectent une variation dans l'attitude du CSM, un signal est envoyé à l'AGC, qui active le quad RCS correspondant, permettant ainsi de restituer l'attitude désirée.
Le FDAI remplit les fonctions suivantes :
1) Fournit un affichage intérieur-extérieur de l'attitude du vaisseau spatial par rapport à un cadre de référence inertiel sélectionné au moyen d'une boule graduée à trois axes et d'index de référence appropriés.
2) Fournit un affichage "en vol" de la position angulaire du vaisseau spatial par rapport à une référence inertielle dans les trois axes au moyen d'aiguilles (pointeurs) d'erreur d'attitude.
3) Fournit un affichage en vol de la vitesse angulaire de l'engin spatial autour de chacun des trois axes perpendiculaires du corps de l'engin spatial avant le niveau de 0,05g pendant la rentrée (après que 0,05g soit atteint, les affichages fournissent la vitesse angulaire autour de l'axe de tangage de l'engin spatial et autour des axes d'entrée de roulis et de lacet).
4) Fournit un affichage centralisé des attitudes, des taux du véhicule et des erreurs d'attitude.
5) Fournit une orientation d'attitude grossière (obtenable avec la boule) et une orientation fine à l'aide d'aiguilles d'erreur d'attitude.
6) Indique les limites de manœuvre de l'IMU et l'approche de ces limites pendant les manœuvres.
7) Fournit un moniteur et une vérification croisée des conditions de l'équipement de référence en comparant les taux de l'axe du corps adjacent aux erreurs d'attitude de l'axe du corps.
8) Permet de surveiller l'exécution par le SCS des commandes du système de référence dans trois axes par trois aiguilles de contrôle.
9) Fournit des facteurs d'échelle variables dans les indications de taux et d'erreur pour une précision variable des manœuvres requises pendant les différentes phases de la mission.
Le blocage de cardan, qu'est ce que c'est? Afin d'économiser de la masse et de la puissance, les ingénieurs ont choisi pour le CSM d'utiliser une unité de mesure inertielle à trois cardans. Cette mesure d'économie de masse a l'inconvénient de compliquer considérablement certains des aspects opérationnels du vol d'une mission car elle limite la gamme d'attitudes que le vaisseau spatial peut adopter. De ce fait, l'équipage et les contrôleurs de vol doivent éviter d'orienter le vaisseau dans certaines directions par rapport à la plate-forme de guidage. Cette caractéristique est inhérente au système tel qu'il est conçu par l'équipe du MIT, qui a opté pour un montage à trois cardans pour la plate-forme, similaire au système qu'ils ont conçu pour le missile Polaris, et différent des quatre cardans que l'on trouve dans l'unité d'instrumentation du lanceur Saturn V et dans le vaisseau spatial Gemini. Mais il y a de bonnes et solides raisons de n'utiliser que trois cardans. En plus d'économiser la masse d'un cardan extérieur lourd, les compromis comprennent une tendance réduite de la plate-forme à dériver dans son orientation et une plus grande précision. Cependant, la disposition à trois cardans a un effet secondaire malheureux par lequel, si les cardans sont déplacés d'une manière particulière, l'ensemble perd sa capacité à maintenir l'alignement de la plate-forme : une condition appelée "blocage de cardan", qui signifie que le système a perdu toute connaissance de la direction dans laquelle le vaisseau spatial pointe. La présence d'un quatrième cardan aurait permis d'éviter ce problème. Par conséquent, il a fallu faire attention pendant le processus de planification du vol, et pendant le vol lui-même, d'éviter le risque d'un blocage de cardan. Le blocage de cardan est donc la perte d'un degré de liberté dans un mécanisme tridimensionnel à trois cardans qui se produit lorsque les axes de deux des trois cardans sont entraînés dans une configuration parallèle, "verrouillant" le système en rotation dans un espace bidimensionnel dégradé. 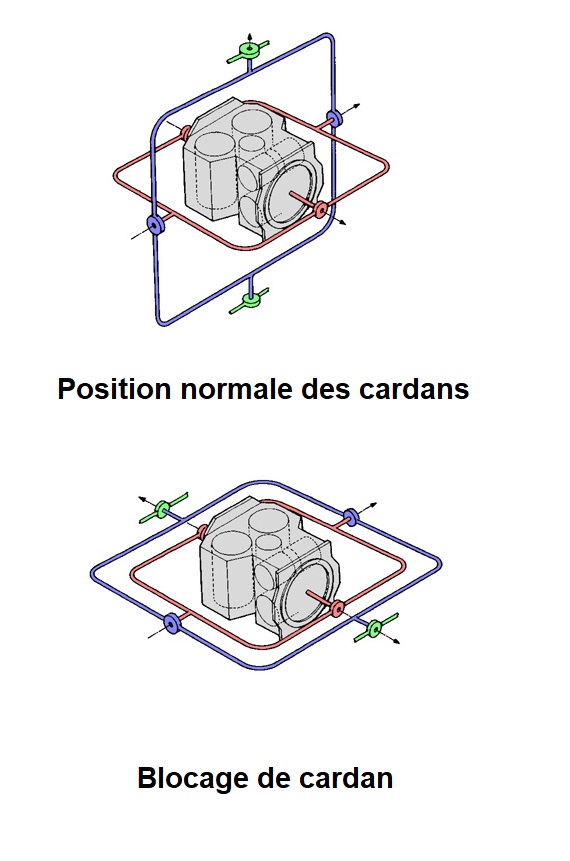 Schéma montrant la façon dont une plate-forme de guidage peut entrer dans un blocage de cardan Le seul moyen de sortir d'un blocage de cardan et de revenir à un système de navigation entièrement fonctionnel est de réinitialiser et réaligner complètement la plate-forme inertielle. entraînant éventuellement la perte d'un travail opérationnel important. Pire encore, si cela se produit à proximité d'une manœuvre critique (ou dans une situation de crise, telle que la mission Apollo XIII) où un bon alignement de la plate-forme est important, il n'y a pas de temps disponible pour le corriger. Pour aider les équipages à éviter ce genre de situation, deux zones de la surface du FDAI sont marquées de deux disques rouges (90° et 270° en lacet et 0° en tangage). Manœuvrer l'engin spatial pour l'amener vers ces zones rouges signifie risquer un blocage de cardan. Il y a un témoin de mise en garde sur le DSKY qui s'illumine avertissant l'équipage lorsqu'il approche du blocage de cardan. Si l'angle dépasse 70°, l'ordinateur allume le témoin "GIMBAL LOCK" . 85° étant la limite absolue, un deuxième témoin s'illumine ("NO ATT") en plus du précédent, après quoi une condition de blocage de cardan existe et leur référence d'attitude est perdue (le FDAI cesse alors de se mouvoir).  Position de l'indicateur "Gimbal lock" entouré en jaune, l'indicateur "NO ATT" est juste à côté Le mécanisme qui provoque le blocage de cardan n'est pas facile à décrire. Comme nous l'avons vu précédemment, la plate-forme est montée dans trois cardans imbriqués. Chacun d'entre eux a un axe de rotation qui est disposé à 90° de l'axe du cardan adjacent. Dans la disposition normale, ces trois axes permettent trois degrés de liberté car ils pointent dans trois directions différentes. Le problème apparaît lorsque l'on adopte une attitude permettant aux axes des cardans extérieur et intérieur de s'aligner. Lorsque l'on s'approche de cette condition, le système de cardan perd sa capacité à isoler la plate-forme des rotations de l'engin spatial, car il n'y a plus que deux degrés de liberté. Tous les axes du cardan se trouvent alors sur un seul plan, de sorte que toute rotation de l'engin spatial autour d'un axe extérieur à ce plan ne peut être prise en compte par aucun des axes du cardan. Puisque la région qui flirte avec le blocage de cardan est définie par le REFSMMAT actuel, chaque fois que le vaisseau spatial doit manœuvrer vers une attitude susceptible de s'approcher du blocage de cardan, le contrôle de mission doit transmettre à l'équipage un nouveau REFSMMAT en fonction duquel la plate-forme peut être réalignée. Bien entendu, tout cela est mis au point lors de la planification de la mission. Jusqu'à huit REFSMMAT peuvent être utilisés au cours d'une mission, changeant au gré des exigences opérationnelles. Chaque fois que le REFSMMAT change, la plate-forme est dûment réalignée. Mais éviter un blocage de cardan n'est qu'une des raisons de changer de REFSMMAT. Une raison plus importante est de faciliter la surveillance des événements critiques, tels que le lancement, la rentrée dans l'atmosphère et les grandes manœuvres nécessitant une longue combustion des moteurs ou pour lesquelles l'attitude correcte du vaisseau spatial est primordiale. Lorsque Apollo 8 effectue le premier vol habité vers la Lune, seuls trois REFSMMAT sont nécessaires. L'objectif de la mission est simple : aller sur la Lune, faire dix orbites et revenir. Il y a peu de raisons pour que le vaisseau spatial adopte des attitudes très différentes. Pour le voyage vers la Lune, la plate-forme est alignée sur le REFSMMAT du pas de tir. Cela représente l'attitude de la rampe de lancement dans l'espace au moment du lancement, telle que déterminée par rapport aux étoiles. Cette orientation permet à l'équipage de suivre facilement la progression de son ascension depuis la surface de la Terre. Plus tard, alors que l'équipage s'approche de la Lune, ils réalignent leur plate-forme sur un nouveau REFSMMAT, qui coïncide avec l'attitude idéale pour la combustion des moteurs qui les emmènent en orbite lunaire. Le choix d'une telle orientation pour leur plate-forme, leur permet de surveiller plus facilement leur attitude sur les écrans du vaisseau spatial. Une fois qu'ils quittent la Lune, Lovell réaligne la plate-forme d'Apollo 8 sur un REFSMMAT approprié pour la rentrée dans l'atmosphère terrestre, toujours pour faciliter la surveillance de cet événement critique. Le saviez vous?? Les missions Gemini ont précédé les missions Apollo. Mais le vaisseau spatial Gemini utilisait un IMU monté sur un système à quatre cardans, tandis que le vaisseau spatial Apollo devait compter sur un système à trois cardans. Pourquoi cela ? Bien que les missions Gemini aient été lancées avant celles d'Apollo, le projet Apollo a en fait commencé avant le projet Gemini. Les ingénieurs de Gemini ont pu tirer parti des conceptions du vaisseau spatial Apollo et les améliorer lors de la construction du vaisseau spatial Gemini. |
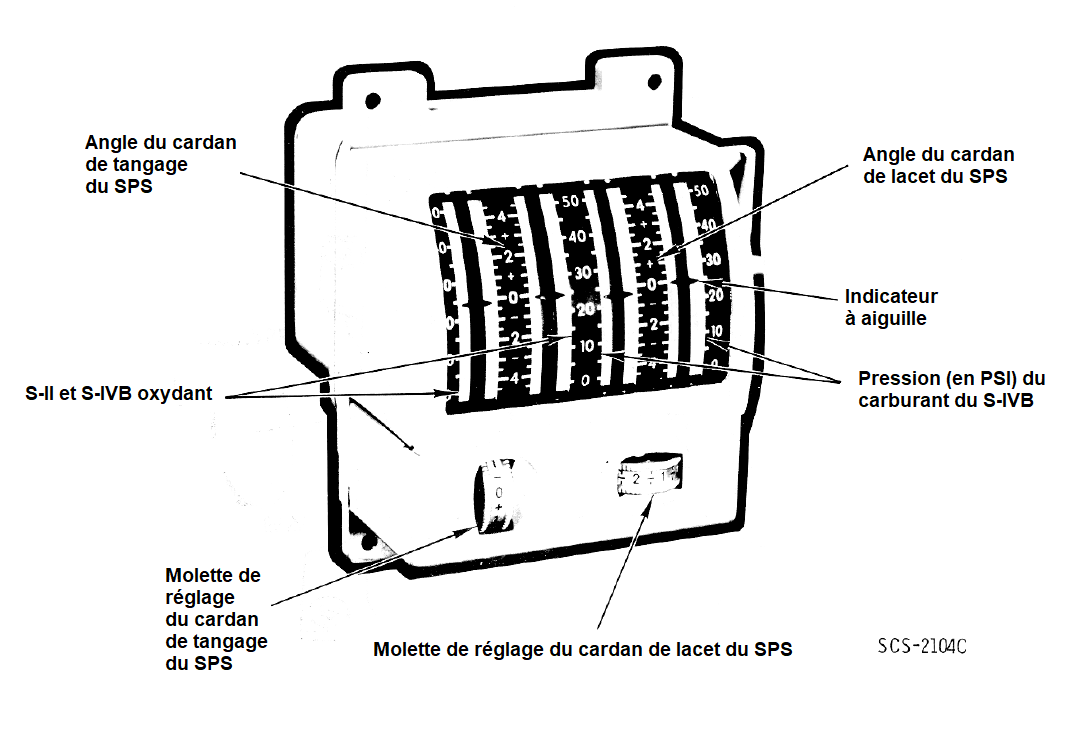
Le GP/FPI pour Gimbal-Position and Fuel-Pressure Indicator (1) affiche les pressions de carburant et d'oxydant de l'étage S-II sur l'un des ensembles de mouvements de compteurs redondants pendant la poussée, (2) affiche les pressions de carburant et d'oxydant du S-IVB sur l'autre ensemble de mouvements de compteurs redondants pendant la poussée, (3) affiche la position angulaire du cardan du moteur du SPS autour des axes de tangage et de lacet, un sur chacun des deux ensembles de mouvements de compteur, et (4) permet d'insérer manuellement des signaux de commande de condition initiale dans les servosystèmes d'actionneur pour le tangage et le lacet au moyen de commandes à molette.
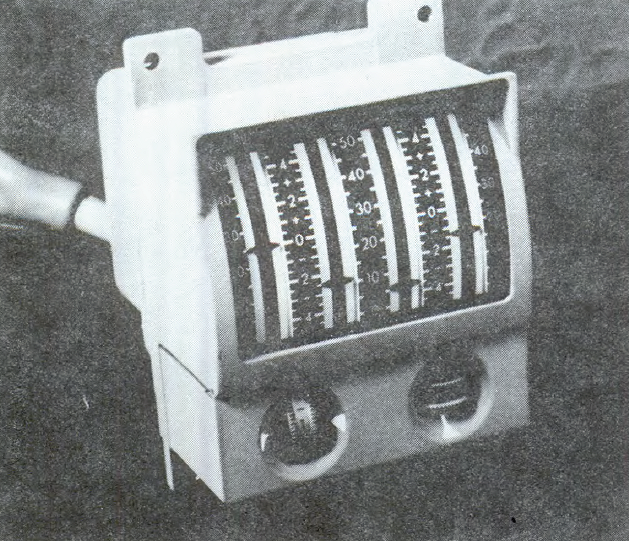 GP/FPI |
 |
Lors de la rentrée dans l'atmosphère, un accéléromètre envoie un signal à l'ordinateur lorsque l'accélération dépasse 0,05 G. L'AGC charge automatiquement le programme 64, qui gère le guidage lors de la rentrée dans l'atmosphère, pour choisir le meilleur couloir.
Si une erreur est détectée, ou commise par l'ordinateur (erreur de calcul), un astronaute peut contourner le PGNCS qui gère la rentrée pour basculer en SCS, et piloter lui-même le CM. C'est une opération qui peut-être effectuée à n'importe quel moment de la mission, car un astronaute peut contrôler manuellement le vaisseau en cas de force majeure, mais généralement, c'est l'AGC qui gère toutes les étapes de la navigation.
Le coupleur d'affichage gyroscopique (GDC ou Gyro Display Coupler) fournit des signaux de référence d'attitude aux FD/AI pour afficher l'attitude totale et des erreurs d'attitude du vaisseau spatial. Les signaux de vitesse angulaire proviennent toujours de l’un ou l’autre des deux ensembles gyroscopiques BMAG. L’affichage de l’attitude requiert une liaison entre l’un de ces ensembles et le FDAI. Cette combinaison fournit un système de référence d’attitude auxiliaire permettant une indication de la position du vaisseau spatial par rapport à un repère d’axes donné. Les erreurs d’attitude peuvent être générées via la liaison entre le GDC et les aiguilles d’erreur du FDAI, en passant par le calculateur ASCP. Cette combinaison permet d’aligner le système de référence du GDC sur une orientation donnée, tout en surveillant visuellement les écarts sur les aiguilles d’erreur — elle peut également être utilisée pour guider manuellement le vaisseau lors d’une manœuvre.

Le GDC peut être utilisé dans les configurations suivantes :
1) Alignement : permet d'aligner le GDC sur une référence donnée (GDC Align).
Ce mode permet d’aligner les angles d’Euler internes du GDC sur une référence inertielle définie par les molettes de réglage d’attitude (résolveurs). Les résolveurs du GDC sont alors comparés à ceux de l’ASCP sur chaque axe, générant des signaux d’erreur proportionnels aux écarts d’angle. Ces signaux sont utilisés pour corriger la position du coupleur afin de ramener l’écart à zéro. Pendant l’alignement, toutes les autres fonctions du GDC sont inhibées.
2) Mode Euler : calcul l'attitude inertielle totale et de l'erreur d'attitude du vaisseau à partir des signaux d'entrée de vitesse de celui-ci.
Dans ce mode, le GDC accepte les signaux de vitesse angulaire (tangage, lacet, roulis) issus de l’un des BMAGs, et les intègre pour calculer les angles d’Euler. Ces données sont transmises aux FDAI pour affichage, et aux calculateurs ASCP pour calcul des erreurs d’attitude. Ces erreurs, exprimées sous forme d’angles de corps, sont également affichées sur les aiguilles d’erreur.
3) Mode Non-Euler : Les signaux analogiques de vitesse angulaire en tension continue (DC) issus des BMAGs sont directement convertis et transmis à l’ordinateur AGC (Apollo Guidance Computer). Dans ce mode, les circuits d’entraînement des FDAI sont désactivés.
4) Mode entrée (sous entendu atmosphérique, seuil de 0,05 G) : Le GDC accepte les signaux de roulis et de lacet issus des BMAGs pour déterminer l’attitude de roulis par rapport à l’axe de stabilité. Cette information est utilisée pour :
• Commander le Roll Attitude Indicator de l’EMS (Entry Monitor System), ou
• Alimenter le roulis sur les FDAI, en mode de surveillance simplifiée (roulis uniquement).
L’affichage de l’attitude totale, de l’erreur d’attitude et des vitesses angulaires permet de surveiller en continu l’orientation du vaisseau spatial. Étant donné qu’une même source de données peut produire différents types d’affichage, le choix dépend du mode de mission actif à un instant donné.
Une unité d’affichage de taux orbital peut être insérée électriquement dans le canal de tangage entre le système électronique d’affichage et le FDAI. Elle permet d’afficher la verticale locale (par rapport à la Terre ou à la Lune) pour le tangage, en fonction de l’orbite. L’équipage peut sélectionner l’astre de référence (orbite terrestre ou lunaire) et ajuster l’attitude orbitale en conséquence.
Le GDC peut également être utilisé comme système de référence d’attitude de secours en cas de défaillance du système inertiel principal (IMU/PGNCS). Pour cela, il suffit de basculer le commutateur ATT du CMC de la position IMU à GDC.
Ensembles de gyroscopes (Honeywell, Inc., Minneapolis)
Deux unités, la GA-1 et GA-2 (GA pour Gyro Assemblies), mesurant chacune 15,2 par 17,8 par 36,2 cm (6 par 7 par 14-1/4 in) et pesant 10,2 kg pièce (22 lb 7 oz), sont situées sur le côté gauche du poste de navigation, dans la baie d'équipement inférieure. Chaque unité contient trois gyroscopes d'attitude, appelés BMAG (Body Mounted Attitude Gyros), montés directement sur la structure du vaisseau spatial (plutôt que sur une plate-forme gyrostabilisée), alignés selon les axes X, Y et Z, afin de détecter les changements d’attitude. Ces gyroscopes à un seul degré de liberté génèrent un signal électrique proportionnel à la vitesse angulaire autour de leur axe ; un système est alors nécessaire pour transformer ces vitesses en angles d’attitude. C'est le GDC qui traite ces signaux pour estimer l’attitude du vaisseau (angles de tangage, de lacet et de roulis), bien que cette estimation soit sujette à une dérive progressive. Tous les composants de chaque ensemble — gyroscopes, alimentation, électronique de détection et de contrôle — sont logés dans un boîtier soudé en alliage d’aluminium, conçu pour garantir l’étanchéité au vide et la continuité électrique.
Les BMAGs peuvent fonctionner en mode taux ou position. L’unité BMAG 1 gère l’attitude (mode attitude/ display), BMAG 2 gère le taux. Étant des systèmes inertiels purement montés sur le corps (sans plateforme stabilisée), les BMAGs dérivent plus rapidement que l’IMU, ce qui nécessite une réinitialisation périodique via le GDC Align, calée sur l’IMU.
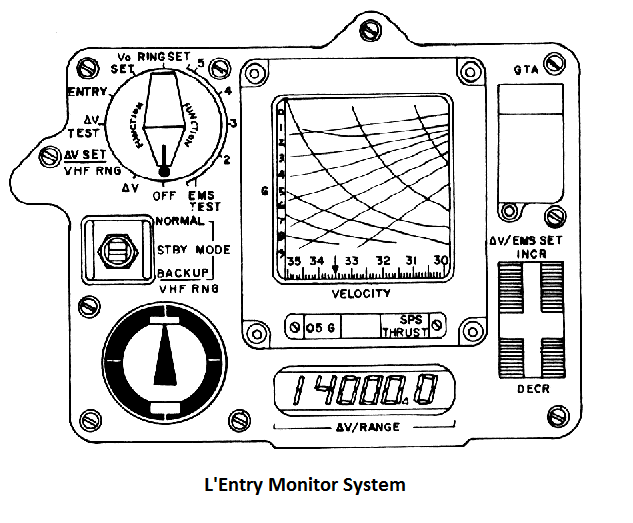
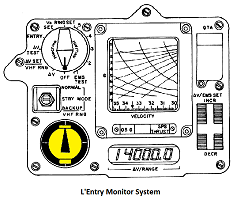
La rentrée dans l'atmosphère du CM est une tâche nécessitant la surveillance d'un ensemble complexe de variables, qui doivent restés dans des plages étroites de valeurs. Le DSKY n'est pas en mesure de présenter toutes les informations nécessaires à l'équipage d'une manière utile. C'est surtout une question de conditions environnementales : les changements de vitesse, l'altitude et l'accélération (force g) auxquelles les astronautes sont soumis. Il est alors difficile pour eux de lire et d'interpréter les données sous forme numérique affiché sur le DSKY, difficultés qui peuvent compromettre l'efficacité d'une éventuelle réaction. L'Entry Monitor System (EMS) fut créé afin de fournir les informations demandées sous un format graphique.
Ce n'est pas un indicateur unique mais un système de guidage et de surveillance spécialisé afin de présenter les paramètres critiques à l'équipage pour la rentrée atmosphérique. Il occupe une position de premier plan sur le MDC du CM, directement en face du siège de gauche. Bien que sa mission nominale est de suivre les progrès de la rentrée, le fait qu'il prenne les données d'un accéléromètre interne (indépendant du système de guidage principal) fait de lui un système de sauvegarde parfait pour aider le CMP à piloter manuellement le CM lors de de cette phase. En effet, le CM Apollo n'est pas un simple objet passif tombant sur Terre, tel un météore : il peut réellement "voler" vers une cible. Pas de beaucoup, mais un peu. Le centre de gravité du véhicule étant légèrement décalé, cela provoque une légère portance dans une direction. Lors de la rentrée dans l'atmosphère, l'ordinateur et/ou le pilote fait tourner le vaisseau spatial de sorte que le vecteur de portance modifie ainsi sa trajectoire.
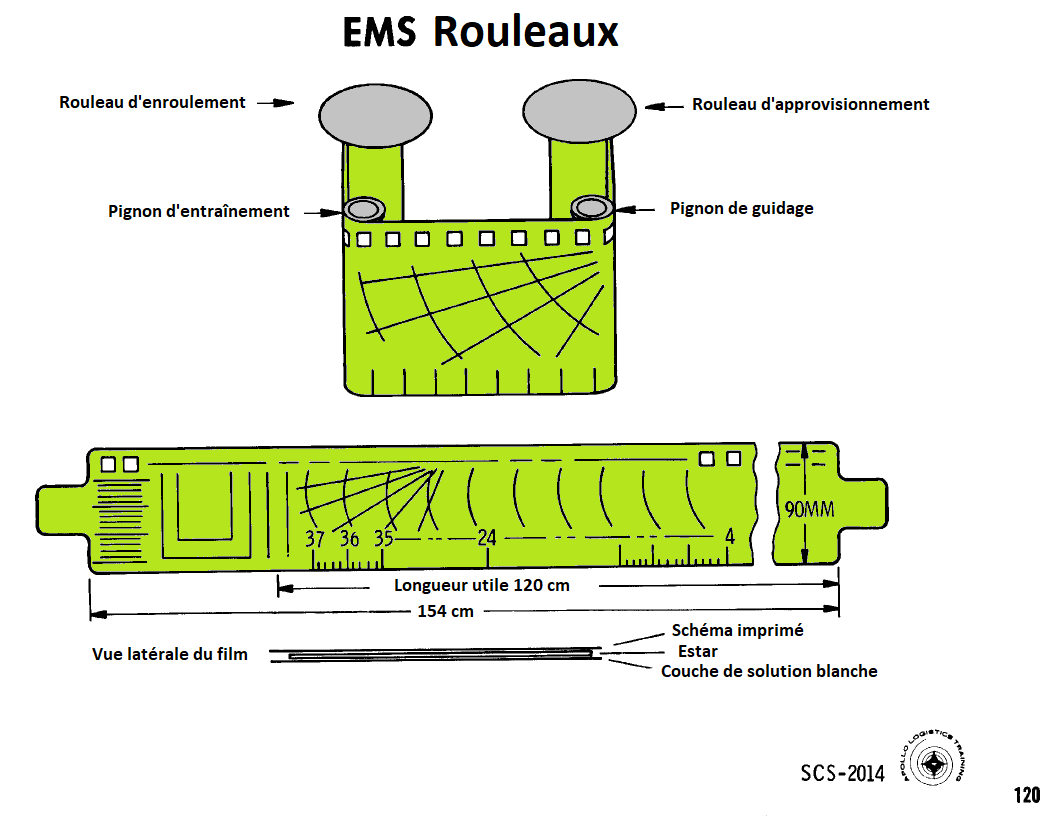
L'EMS se compose de deux ensembles de base : l'ensemble de contrôle du moniteur d'entrée (Entry Monitor Control Assembly ou EMCA) et l'ensemble de défilement du moniteur d'entrée (Entry Monitor Scroll Assembly ou EMSA). L'EMCA contient les composants électroniques et se compose de circuits intégrés, d'un indicateur de distance, d'un accéléromètre, de la logique de compteur de changement de vitesse/de distance à parcourir, d'un démultiplicateur d'impulsions, d'alimentations et de commutateurs. L'ensemble EMSA ou traceur de facteur de charge/vitesse (g-V) est constitué d'un rouleau de film en polytéréphtalate d'éthylène (PET/Estar) sur lequel sont imprimées les lignes de potentiel g-onset, g-offset et distance.
Le panneau principal de l'EMS a un bouton pour permettre la sélection des différentes fonctions (y compris les 5 tests différents pour vérifier son fonctionnement) et quatre indicateurs de base :
 |
Un indicateur lumineux de seuil de 0,05G : c'est un simple témoin lumineux qui s'allume lorsque l'accéléromètre de l'EMS note un début de décélération due à la rentrée arbitrairement choisi égal à 0,05 G (soit un vingtième de l'accélération de la gravité). L'altitude réelle à laquelle cela se produit dépend d'une série de paramètres. La lampe de seuil s'éteint à tout moment pendant la rentrée lorsque le facteur de charge d'accélération tombe en dessous du niveau prescrit de 0,02G. |
 |
L'indicateur de stabilité du roulis : il est composé d'un pointeur indiquant la direction actuelle de la portance et de deux voyants lumineux (Vecteur Lift Up and Down). L'un de ces deux voyants s'allume à un moment donné (normalement 10 secondes) après que le seuil d'entrée (seuil de 0,05 G) soit atteint. Le voyant qui s'allume dépend du niveau d'accélération mesuré. Les deux voyants s'identifient à l'orientation de la portance requise lors de la pénétration atmosphérique initiale et sont utilisés pour vérifier et, si nécessaire, corriger l'orientation. L'indicateur de stabilité du roulis utilise l'accéléromètre, le système de stabilisation et de contrôle du CM pour déterminer la valeur de la capacité portante de celui-ci. Il n'y a pas de graduations sur l'écran, mais la lecture équivalente sera de zéro lorsque l'indicateur pointe vers le haut du tableau de commande et augmente jusqu'à 360 dans le sens anti-horaire. Le test de comparaison de couloir est effectué environ 10 secondes après que l'indicateur 0,05 G soit allumé. |
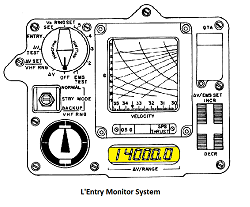 |
L'indicateur de la distance / vitesse : cet affichage numérique permet d'indiquer la distance (en miles nautiques) du point d'amerrissage, mais aussi la vitesse en temps réel. Ces deux valeurs doivent être définies avant la rentrée (ou autres manœuvres, voir ci-dessous pour d'autres usages de l'EMS). Lorsque l'EMS note une variation de l'accélération, l'indicateur commence à diminuer. |
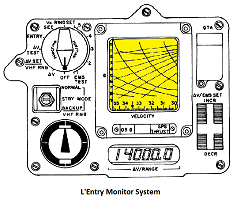 |
L'affichage graphique du profil de réentrée : c'est un affichage graphique pré-numérique, de sorte que le regard (coloré en jaune sur le schéma) est en réalité une simple vitre et non un écran. |
L'EMS est l'exemple typique de la capacité des ingénieurs de la NASA d'être en mesure de produire des composants pouvant être utilisés pour différentes tâches. L'accéléromètre de l'EMS distinct et indépendant de celui du système de guidage inertiel primaire a été utilisé dans les manœuvres qui utilisent le SPS (TLI, LOI et TEI) comme un système de sauvegarde pour contrôler la performance de l'allumage et de fournir éventuellement l'arrêt du moteur (dans le cas où l'AGC ne l'ait pas fait).
Grâce à l'EMS, le CMP s'assure que la ligne "tracée" reste dans les limites des contraintes. Si ce n'est pas le cas, il doit agir en contrôlant manuellement le véhicule.
Lors de la rentrée le CM est soumis à trois forces : la gravité, la trainée et la portance. Ces trois valeurs forment la force résultante. Ainsi, l'équipage est en mesure d'exploiter cette force résultante et d'orienter le CM dans la région du modèle de contraintes, comme indiqué sur l'affichage du tracé déroulant. Le véhicule a été conçu pour ne pas être aérodynamiquement symétrique, ce qui signifie que si le pilote fait "rouler" le véhicule légèrement de part et d'autre de chaque côté, la portance sur le véhicule est diminuée ou augmentée. Cette variation de la portance entraîne une légère modification de la force résultante ainsi que le facteur de charge ou de l'accélération du CM. À chaque rentrée dans l'atmosphère d'Apollo, le vaisseau spatial était donc tourné plusieurs fois pour que le vecteur de portance soit orienté vers diverses directions. C'est ainsi qu'Apollo a pu obtenir les profils de rentrée dont il avait besoin. C'est également la raison pour laquelle certains atterrissages d'Apollo ont pu être si étonnamment proches de leurs cibles.
Attitude totale : le terme "attitude totale" fait référence à une combinaison d'informations provenant de deux sources. L'une de ces sources est la plate-forme stable de l'IMU, la seconde source est le coupleur d'affichage gyroscopique.
REFSMMAT : ou Reference to Stable Member Matrix pour référence matricielle, est une définition numérique d'une orientation fixe dans l'espace et est généralement (mais pas toujours) définie par rapport aux étoiles. Il est utilisé par le système principal de guidage, de navigation et de contrôle Apollo (PGNCS) comme référence vers laquelle la plate-forme montée sur cardan en son cœur doit être orientée. Chaque opération au sein de l'engin spatial nécessitant une connaissance de la direction est effectuée en respectant l'orientation de la plate-forme de guidage, elle-même alignée selon un REFSMMAT particulier. Au cours d'un vol Apollo, le REFSMMAT utilisé, et donc l'orientation de la plate-forme de guidage, change en fonction des besoins opérationnels, mais jamais au cours d'un processus de guidage, c'est-à-dire qu'un REFSMMAT peut être utilisé depuis le lancement jusqu'à l'injection trans-lunaire , un autre de la TLI à la Mi-course mais il ne change pas au milieu d'une combustion ou d'une série de manœuvres.
Les angles d'Euler : introduits par le mathématicien Suisse Leonhard Euler, ils permettent de déterminer la rotation d'un corps dans un système de coordonnées. Ils peuvent être définis sous forme de trois rotations relatives aux trois axes principaux. Les angles d'Euler sont le plus souvent représentés par la lettre phi pour la rotation de l'axe X, par la lettre theta pour la rotation de l'axe Y et par la lettre psi pour la rotation de l'axe Z. Toutes les rotations peuvent être décrites en utilisant une combinaison de ces angles. Au total, 12 combinaisons d'angles d'Euler existent : (1,2,1), (1,2,3), (1,3,1), (1,3,2), (2,1,2), (2,1,3), (2,3,1), (2,3,2), (3,1,2), (3,1,3), (3,2,1), (3,2,3). Les angles d'Euler sont souvent utilisés dans le développement des dynamiques de véhicules. La séquence (3-1-2, correspondant aux angles de roulis, tangage et lacet) est souvent utilisée pour décrire l'orientation d'un satellite par rapport au référentiel orbital.
Sources, PDF : Apollo Experience Report : Guidance and Control Systems Command and Service Module Stabilization and Control System, Apollo Command Module Block II Primary Guidance, Navigation, and Control System Manual (1966), Apollo Experience Report : Guidance and Control Systems, Apollo Stabilization and Control System Block II Detailled Training Program, le livre "How Apollo Flew to the Moon" de W. David Woods. Texte de Paul Cultrera, tous droits réservés.