LE COMPLEXE INFORMATIQUE EN TEMPS RÉEL (RTCC, Real-Time Computer Complex)
![]()
L'histoire de l'informatique dans le contrôle des missions habitées est en grande partie celle d'une coopération étroite et d'un partenariat mutuellement profitable entre la NASA et IBM. Il existe de nombreux exemples où IBM a apporté son soutien au programme spatial, mais jamais ses contributions n'ont été aussi directement applicables à sa gamme de produits commerciaux que dans ce cadre.
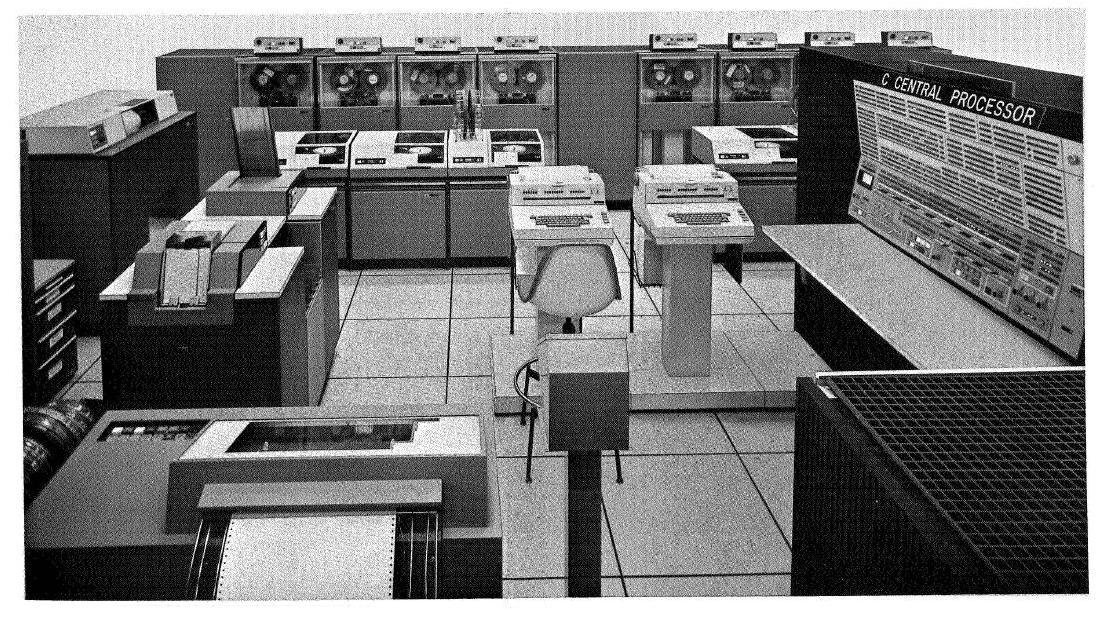
Le Real-Time Computer Complex (RTCC) fait partie du centre de contrôle de mission (MCC). En coordination avec le système de communication, de commande et de télémétrie (Communication, Command and Telemetry System ou CCATS) ainsi que le système d'affichage et de contrôle, il collecte, traite, compare, réparti et converti les données en provenance du vaisseau Apollo en informations exploitables par les contrôleurs de vol et leurs équipes de soutien dans la MOCR. Il génère également des données de test et des programmes d'entrainement. En outre, il compile les instructions de mission et les données à transmettre à l'ordinateur de guidage du vaisseau spatial Apollo. Le RTCC peut aussi fournir la puissance de calcul nécessaire pour réaliser des analyses approfondies et formuler des recommandations sur les trajectoires du vaisseau spatial en cours de mission. À l'ouverture du centre en mars 1965, il est composé de cinq ordinateurs IBM 7094-IIs. Chacun d'eux, occupant une surface de 15 m², représente alors l'avant-garde de la technologie informatique. Le RTCC est situé dans la salle 112, au rez-de-chaussée de l'aile MOW du MCC-H. On peut légitimement le considérer comme le cerveau du MCC-H ; il constitue d'ailleurs, à cette époque, le complexe informatique le plus puissant au monde.
Architecture de l'IBM 7094 IIs
Fabricant : IBM.
Technologie du processeur : transistors.
Technologie et taille de la mémoire interne : Matrice de tores ferromagnétiques, 32 768 mots de 36 bits (6 caractères de 6 bits par mot).
Mode d'adressage : Direct par mots de 00000 à 77777 en octal, indirect et indexé.
Représentation des entiers : 36 bits en mode complément à un arithmétique (le LSB à 1 = nombre négatif), à l'exception des registres d'indexes où ils sont en complément à deux.
Registre d'index : 7.
Instruction machine : 268.
Temps de calcul d'une addition en virgule flottante : 2,8 µSecs.
Temps de calcul d'une multiplication en virgule flottante : 2,8 - 5,6 µSecs.
Cycle d'horloge : 1,4 microsecondes.
Première introduction : 1964.
Le 7094s (type I) est une version améliorée du 7090. Le 7090 est, en 1963, l'ordinateur scientifique le plus puissant jamais conçu par IBM à cette date. Le 7094s peut exécuter 500 000 opérations logiques, 250 000 additions ou soustractions, 100 000 multiplications, ou 62 500 divisions en une seconde. Il comprend en plus la double précision en calcul à virgule flottante, et plus de registres d'index. Il est aussi plus rapide car il peut manipuler deux instructions simultanément. L'ordinateur supporte une largeur de bande passante d'entrée/sortie considérablement plus élevée grâce à des canaux de données séparés avec accès mémoire direct, et donc il est également utilisé pour exécuter des applications commerciales et générales. Le 7094s est fourni avec un système d'exploitation appelé IBSYS Operating System, un assembleur FAP (Fortran Assembly Program), les langages Fortran II, IV, et COBOL, ainsi que de nombreuses bibliothèques et autres utilitaires.
Le 7094s "Model II" (utilisé par la NASA à partir du programme Gemini) est une version plus rapide dans laquelle la logique DTL silicium remplace la technologie ECL du Stretch (IBM 7090) dans le contrôle et dans l'unité arithmétique et logique (en anglais Arithmetic and Logical Unit - ALU).
Les machines 7094s et 7094s II ont également un jeu d'instructions double précision (72 bits) en virgule flottante.
On entre les données à l'aide d'un clavier de type télétype, le KSR33, sans lecteur/perforateur de ruban, fabriqué par la Teletype Corporation.
L'IBM 360/J75
Bien que les quatre ordinateurs 7094s II restants soutiennent encore les opérations de vol à travers les trois premières mission Apollo (sans équipage), IBM commence à utiliser le premier IBM 360 comme remplaçant afin de développer les logiciels pour les vols lunaires Apollo, à la suite de l'accident d'Apollo I et de la restructuration du RTCC. Les anciens ordinateurs sont alors remplacés par cinq IBM 360/J75, équipés d’un nouveau système d'exploitation.
L'IBM 360, fabriqué en 1966, est un ordinateur révolutionnaire qui marque un tournant dans le monde de l'informatique. Il intègre de nombreuses innovations et connaît un grand succès, notamment grâce à sa capacité à unifier différents domaines d'application, qu'il soit scientifique, commercial ou administratif. Il constitue la première véritable 'famille' d'ordinateurs, où les mêmes logiciels et périphériques peuvent être utilisés sur toute la gamme, offrant ainsi une compatibilité totale entre les modèles. Cette série inaugure également le concept d'une lignée d'ordinateurs interconnectés, tous compatibles entre eux, une première dans l'industrie. Le nom '360' reflète cette ambition de couvrir toutes les applications possibles, d'où la référence à un cercle complet ou à 360 degrés.
Le modèle 360/J75 est le plus rapide de la gamme. Entièrement câblé, il possède la totalité des instructions du S/360 implémentées en logique cablée, tandis que les modèles inférieurs sont partiellement microcodés. Bien qu'il est initialement prévu d'utiliser également du microcode pour ce modèle, la création d'un magasin de microprogrammes suffisamment rapide pour atteindre les performances souhaitées s'est avérée impossible. Pour son époque, il est réputé pour sa vitesse impressionnante d'un million d'instructions par seconde (MIPS), bien qu'il ne soit pas le plus rapide du monde.
Le RTCC utilise cinq ordinateurs centraux IBM 360-J75, chacun disposant d’une capacité mémoire de 1 mégaoctet chacun (en réalité, 1 mégaword de 8 bits). La mémoire a ainsi été étendue de 196 608 caractères (pour le 7090) à 1 048 576 caractères (pour le 360/J75). Pour le programme Apollo, le système d'exploitation le RTOS 360/75 (Real Time Operating System) est utilisé, fonctionnant à partir de disques ou de bandes.
Ses différents rôles
Les tâches des machines individuelles du RTCC sont réparties comme suit :
- deux ordinateurs sont dédiés au développement de logiciels ou au traitement des données provenant des modules scientifiques déployés sur la surface lunaire par les astronautes pendant la mission en cours
;
- un troisième exécute des simulations de commandes de vol ;
- un autre est constamment en veille dynamique, servant de backup. En cas de défaillance de l'ordinateur principal, la bascule vers cet ordinateur central de secours peut s'effectuer rapidement ;
- le cinquième ordinateur, l'ordinateur central actif ( le "Mission Operation Computer" ou MOC), prend en charge tous les calculs nécessaires durant le vol spatial.
Le "System Selector Unit" permet de gérer cette répartition des rôles, permettant à chaque ordinateur central de passer d'un mode de fonctionnement à un autre. Les modes disponibles sont : "Opérations de mission", "Veille dynamique", "Vérification et formation", et "Hors ligne".
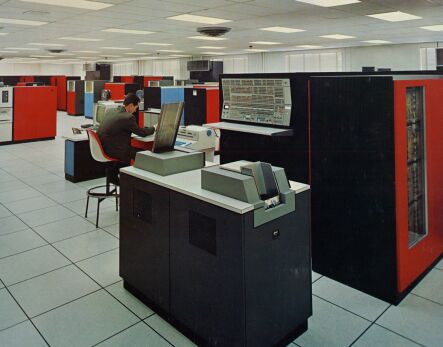 |
Publicité d'IBM vantant les capacités du 360 |
Les calculs du RTCC couvrent l'ensemble du déroulement de la mission :
Les données nécessaires pour contrôler chaque phase de la mission sont collectées, traitées, converties et transmises au Mission Control. Pour surveiller les paramètres de vol du vaisseau spatial, des comparaisons sont effectuées entre les valeurs théoriques et les valeurs réelles. Le RTCC calcule en temps réel la position, l'orientation et la vitesse actuelles du vaisseau spatial, puis compare ces résultats avec les valeurs théoriques préalablement définies. Ces calculs se réalisent en temps réel, ce qui permet une réponse instantanée, d'où le nom de Real-Time Computer Complex. Les données nécessaires au contrôle de chaque phase de la mission sont collectées, traitées, puis traitées et transmises au Mission Control.
Le RTCC est également chargé de calculer le moment de la mise à feu et la durée de la manœuvre TLI. Cette manœuvre, ainsi que d'autres, fait l'objet de simulations avant chaque mission. Certaines valeurs peuvent être précalculées, mais pour permettre une réactivité en temps réel, le RTCC calcule aussi les valeurs actuelles du TLI en fonction des données en cours.
Cela prend encore plus d'importance pour les missions Apollo ultérieures, qui ne suivent pas une trajectoire de retour libre pure, mais une trajectoire hybride. On cherche à maximiser les avantages de la trajectoire de retour libre tout en réduisant ses contraintes. En effet, dans une trajectoire de retour libre, les zones d'atterrissage sur la Lune sont limitées à une zone proche de l'équateur lunaire. En revanche, l'approche hybride permet une plus grande variété de sites d'atterrissage possibles. Cette trajectoire hybride permet aussi de conserver davantage de ressources pour le vaisseau spatial, offrant ainsi la possibilité de transporter plus de charge utile. Le vaisseau spatial quitte la trajectoire de retour libre uniquement après la séparation du S-IVB, et peut ensuite retourner sur Terre en utilisant un ensemble de moteurs supplémentaires présents dans le LM, si la mission devait être interrompue à ce moment-là. Cependant, les simulations ne permettent pas d'obtenir des résultats suffisamment précis pour les calculs dynamiques complexes nécessaires à cette approche, ce qui rend l'utilisation du RTCC indispensable pour les missions hybrides.
Les configurations matérielles de la NASA
La NASA utilise plusieurs configurations matérielles de l'IBM 360/J75 pour le développement et l'exécution de ses systèmes informatiques en temps réel. Chaque configuration est prise en charge par un unique système RTOS/360.
L'unité de traitement 2075
Chaque système informatique du RTCC repose sur un ordinateur IBM 360 modèle 75, dont l'unité centrale de traitement (CPU) est une 2075.
Elle se compose de registres de données, de chemins de données interconnectés et de circuits de commande de séquence. Ces éléments assurent l'adressage de la mémoire principale (2365 Processor Storage), la récupération des instructions dans l'ordre souhaité et de lancer les communications entre la mémoire principale et les dispositifs externes. L'unité centrale de traitement modèle 75 est fonctionnellement divisée en deux parties : l'unité d'instruction (unité I) et l'unité d'exécution (unité E). En général, l'unité I s'occupe du séquençage des instructions, des demandes de stockage principal et des fonctions d'interruption ; l'unité E s'occupe de l'exécution des instructions. Toutefois, certaines instructions, telles que les instructions d'E/S, sont entièrement exécutées par l'unité I ; l'exécution des instructions de chargement et de stockage multiples ainsi que des instructions de définition du masque système est partagée entre les deux unités. L'unité E dispose d'une section à virgule fixe et à virgule flottante, ainsi que d'une section VFL et décimale. Les unités I et E fonctionnent indépendamment et se superposent normalement, en exécutant une instruction tout en décodant et en récupérant l'opérande de l'instruction suivante. Cette superposition des unités I et E est facilitée par la mise en mémoire tampon des instructions et des opérandes. Deux registres de mots entiers sont utilisés pour le préchargement des instructions, et un registre de mots entiers est utilisé pour le préchargement des opérandes. Le préchargement permet à la plupart des accès à la mémoire centrale de se superposer avec l'exécution de l'instruction. Les unités I et E sont verrouillées pour éviter qu'une unité ne prenne le pas sur l'autre et pour garantir le bon fonctionnement des interruptions.
Le modèle 75 est fourni avec le jeu d'instructions universel. Le jeu d'instructions universel comprend le jeu d'instructions standard, ainsi que les instructions de la fonction décimale, de la fonction à virgule flottante, de la fonction de protection de la mémoire et de la fonction de contrôle direct, au total, environ 170 instructions. L'unité de traitement 2075 contient les parties logiques suivantes :
- unité de contrôle de la mémoire
- unité d'instruction
- registres généraux.
L'unité de traitement 2075 est câblée et non microcodée pour maximiser sa vitesse de traitement. Elle avait accès à jusqu'à quatre unités IBM 2365 (lire plus bas) de 256 Ko de stockage processeur, pour un total de 1 Mo de stockage (1 048 576 octets pour être précis). Les données étaient stockées en mots de huit octets. Ainsi, un total de 128 000 mots pouvaient être stockés dans la mémoire principale.
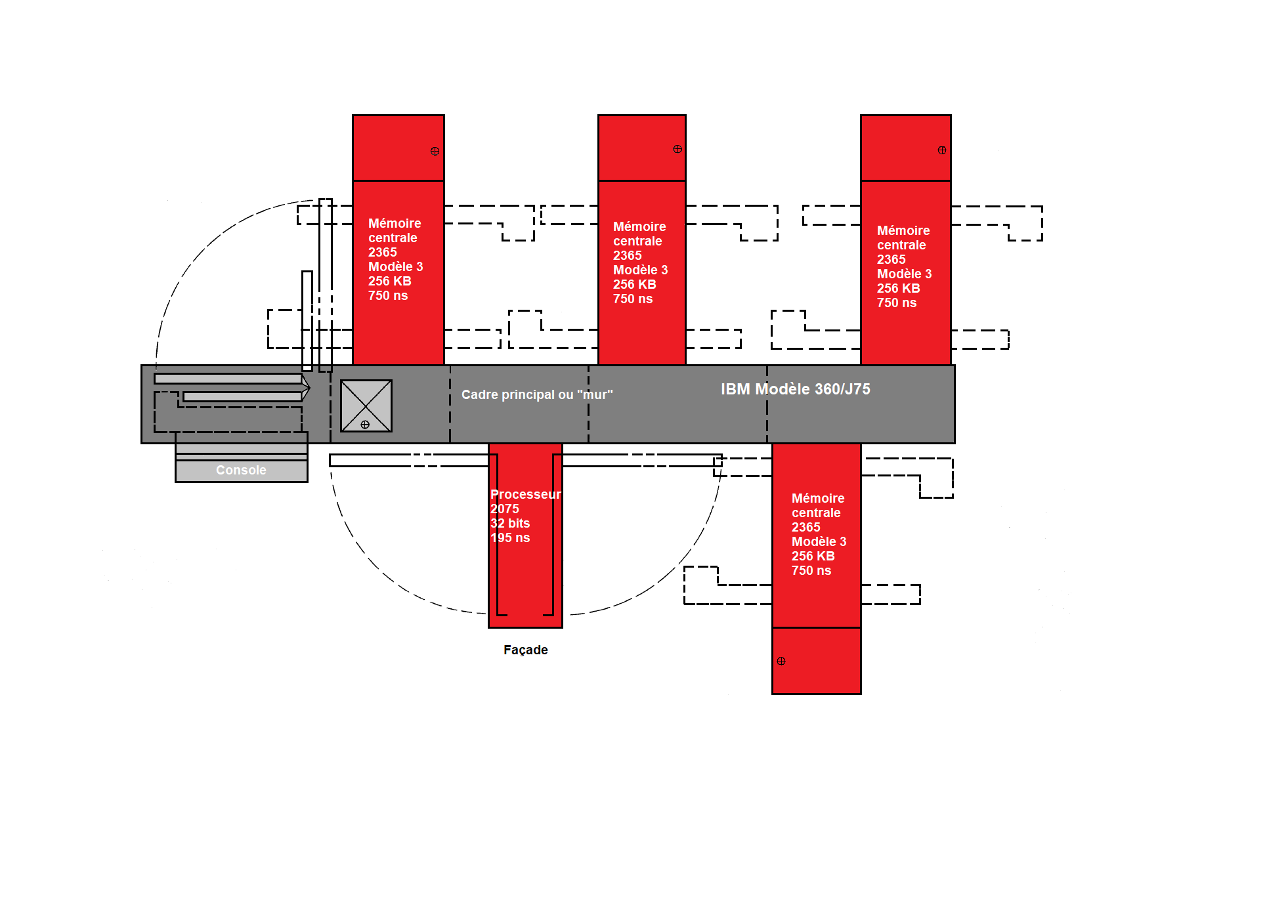
Dans la configuration de base (voir dessin ci-dessous), l'unité centrale de traitement 2075 est constituée d'un mur (main frame) servant à loger l'équipement de conversion de puissance et les câbles, le cadre de contrôle et de maintenance (dans l'alignement du mur), le cadre de l'unité centrale (perpendiculaire au mur) et les unités de stockage des processeurs 2365 (perpendiculaires au mur).
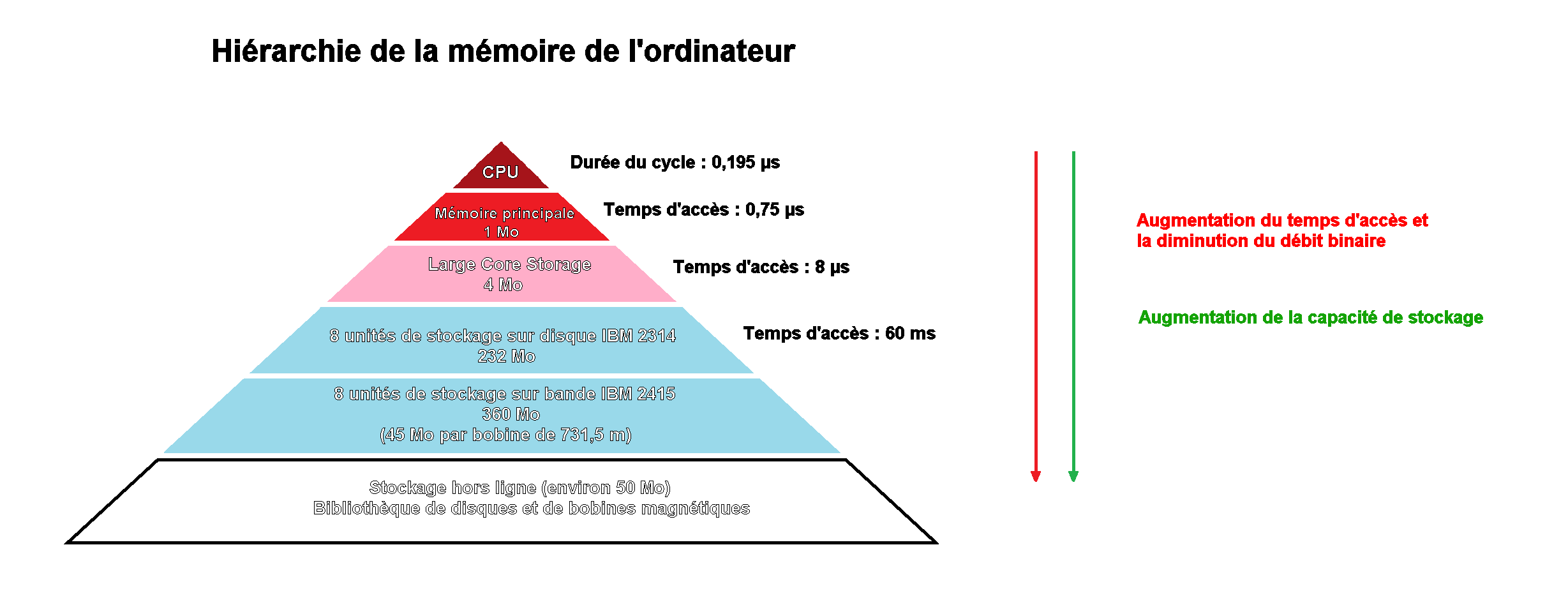
Au cœur de l'unité de mémoire centrale 2365 : Pour le modèle 360/J75, quatre unités de mémoire centrale 2365 modèle 3 fournissent un stockage principal (unité de stockage à noyau magnétique). Chaque modèle 3 dispose d'une capacité de stockage de 262 144 octets, et l'ensemble des unités représente un total de 1 048 576 octets. Les positions des octets sont numérotées de manière consécutive, en commençant par zéro. Une exception d'adressage est signalée lorsque l'une des parties d'un opérande dépasse la capacité maximale de la mémoire principale disponible. La protection de la mémoire est une fonction standard. Entrelacement bidirectionnel Le 2365 modèle 3 comporte deux sections de stockage indépendantes, chacune pouvant fonctionner de manière autonome. Chaque section dispose d'un cycle de stockage de 750 nanosecondes avec un accès parallèle de huit octets (double mot). Chacune des sections comprend 131 072 octets de stockage. Les deux sections sont configurées pour être entrelacées dans les deux sens. Grâce à l'entrelacement, ces deux sections de stockage du 2365 fonctionnent de manière superposée, permettant un accès séquentiel amélioré. Elles sont organisées et contrôlées pour fonctionner logiquement comme une seule unité de stockage d'une largeur de 16 octets. Autrement dit, l'unité de stockage peut accéder à 16 octets d'informations séquentielles à partir de quatre limites de mot. Avec l'entrelacement bidirectionnel, un taux d'accès séquentiel effectif de 400 nanosecondes par double mot (huit octets) est réalisable Entrelacement à quatre voies Deux 2365 modèle 3 peuvent être couplés pour fonctionner selon ce qui est appelé un "entrelacement à quatre voies". Ce principe permet aux quatre sections de stockage des deux 2365 de fonctionner de manière superposée, offrant ainsi une amélioration significative de l'adresse séquentielle. Les quatre sections sont organisées et contrôlées pour fonctionner logiquement comme une seule unité de stockage d'une largeur de 32 octets. En d'autres termes, les unités de stockage peuvent accéder efficacement à 32 octets d'information séquentielle, à partir des limites de huit mots de la mémoire du processeur. En plus de l'entrelacement bidirectionnel au sein d'un seul 2365 modèle 3, les accès à la mémoire de deux 2365 ou 2361 quelconques peuvent se chevaucher. Chaque unité de stockage principale, qu'il s'agisse du 2365 ou du 2361, fonctionne indépendamment des autres. Les unités de stockage ne sont liées que par le fait qu'elles assurent la fonction commune de stockage principal et qu'elles se voient attribuer des adresses de stockage contiguës d'une unité à l'autre. Étant donné que chaque unité de stockage est indépendante, l'accès aux informations dans la plage d'adresses de chaque unité peut se chevaucher. |
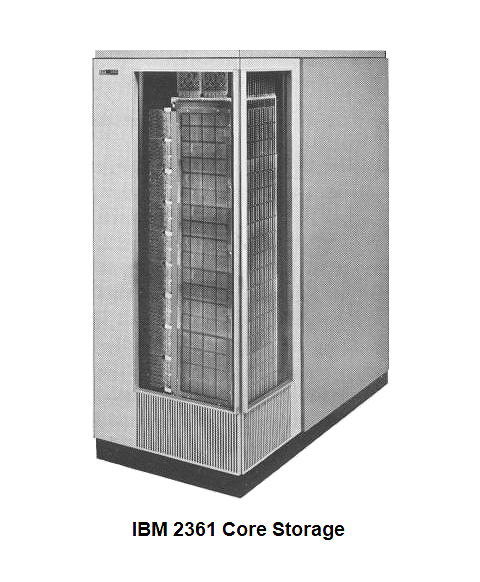
Deux unités de grande capacité de stockage IBM 2361 (Large Core Storage ou LCS) servent d'extension à la mémoire principale (2365), offrant ainsi 4 194 304 octets supplémentaires, tout en agissant également comme un dispositif de mise en mémoire tampon pour récupérer les données et les programmes des lecteurs de disques IBM 2314. Chaque plan de mémoire LCS contient 294 912 noyaux (tores magnétiques) et peut stocker 32 768 octets d'information. Ces plans à noyau de ferrite semi-dure, les plus grands jamais fabriqués, sont câblés automatiquement grâce à la méthode d'alimentation en fil à pointe d'ogive, une invention de Robert L. Judge. Il est impressionnant de voir soixante-quatre fils alimentés en parallèle sur une longueur d'un mètre de noyau, dans une seule unité, et interconnectant les lignes de détection d'octet entre les plans. L'unité de stockage de noyau IBM 2361 de 2 097 152 octets est composée de soixante-quatre plans de mémoire. Cette mémoire présente un cycle de stockage de base de 8 microsecondes, avec un accès parallèle à deux mots (huit octets). Le temps d'accès aux données (double mot) est de 3,6 microsecondes. Le temps restant est chevauché par l'exécution et aucun autre retard ne se produit, sauf si la même unité de stockage est adressée pendant les 4,4 microsecondes suivantes. Chaque 2361 contient près de 20 millions de noyaux de ferrite. Ces unités sont fabriquées dans les installations de production d'IBM à Poughkeepsie, dans l'État de New York.
 Unité de stockage IBM 2361 (x2) |
 Lecteurs de disques 2314 |
Le LCS peut être exploité selon trois modes de fonctionnement afin d'améliorer les performances de l'IBM 360/75 :
1) Gestion des opérations de l'atelier, comprenant diverses tâches :
a) Utiliser le LCS comme espace de travail pour l'assembleur, en remplacement des disques ou bandes, afin d'optimiser le temps d'exécution de l'assembleur ;
b) Utiliser le LCS comme espace de travail pour les compilateurs, en remplacement de la mémoire principale, afin de permettre l'exécution de compilations plus volumineuses dans la mémoire principale ;
c) Placer les informations de contrôle des travaux sur le LCS pour améliorer le débit des travaux ;
d) Utiliser le LCS comme dispositif de résidence pour les programmes des systèmes d'exploitation non résidents (résidant sur disque ou bande).
2) Utilisation du LCS comme extension adressable de la mémoire principale, permettant ainsi l'exécution d'applications plus volumineuses.
3) Utilisation du LCS comme dispositif d'acheminement des données, comme le montre l'illustration ci-dessous. Le RTOS/360 joue un rôle central dans la gestion de l'échange de données dans la hiérarchie mémoire, afin de répondre aux demandes d'informations de l'unité centrale et de maintenir son activité, ce qui permet d'exploiter l'unité centrale de manière optimale. Selon la quantité de données à échanger, une opération d'E/S normale ou une opération d'E/S impliquant l'utilisation du canal de stockage est exécutée.
L'IBM 2701 fournit une interface à réponse rapide pour la demande au système d'affichage numérique (D/TV) dans le MOCR et le RTCC. L'unité d'adaptateur de données IBM 2701 peut contrôler jusqu'à 4 lignes à faible vitesse, 4 lignes à vitesse intermédiaire, 2 lignes à vitesse moyenne ou 2 lignes à grande vitesse, ou encore certaines combinaisons de ces vitesses de ligne, telles que : 2 lignes à faible vitesse et 2 lignes à vitesse intermédiaire, ou 1 ligne à vitesse moyenne et 1 ligne à grande vitesse.
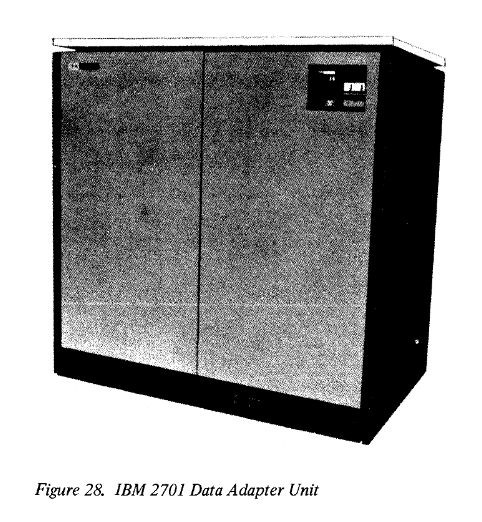 Adaptateur de données IBM 2701 |
 Lecteur de carte/perforateur IBM 2540 |
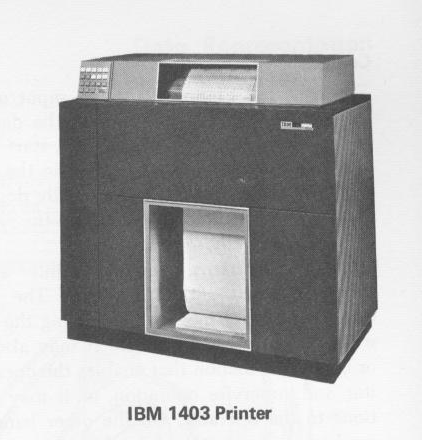 Imprimante IBM 1403 |
L'acceptation et la transmission en temps réel de grandes quantités de données et d'informations de contrôle sont réalisées grâce à l'adaptateur de ligne multiplex IBM 2902 (MLA). Un lecteur de cartes/perforateur 2540, une imprimante IBM 1443, trois imprimantes IBM 1403, trois consoles IBM 1052 et huit lecteurs de bande 2402 complètent la configuration.
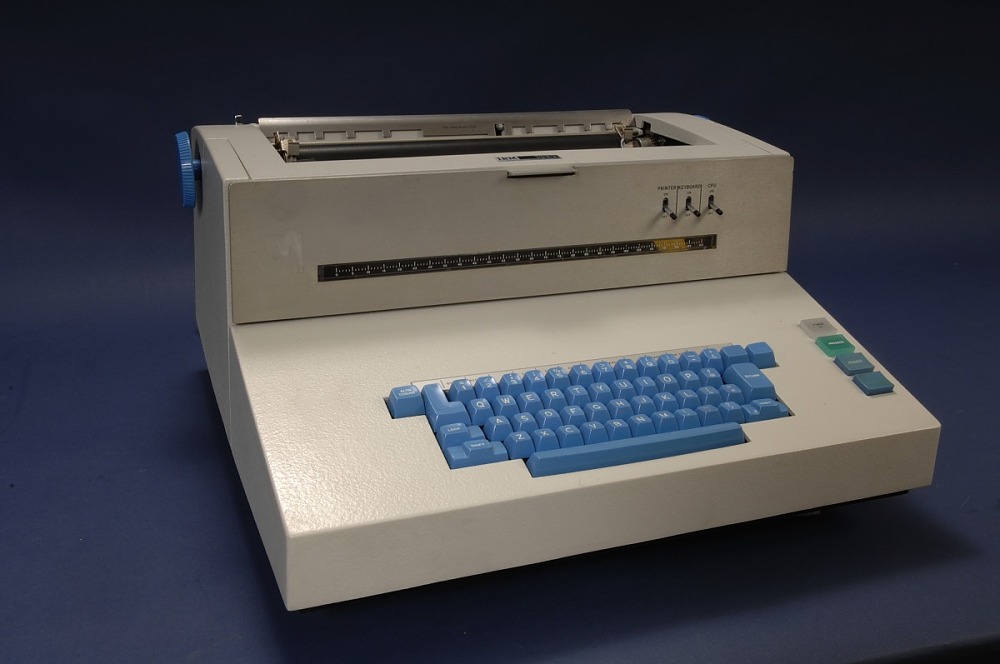 Console IBM 1052 |
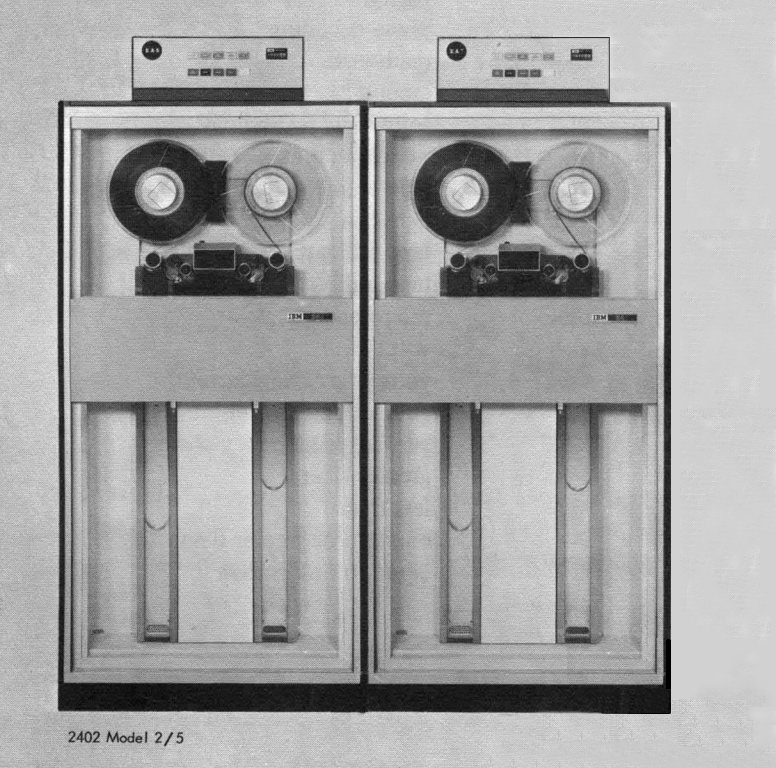 Lecteurs de bande IBM 2402 |
Le canal de stockage (IBM Storage Channel) est un composant supplémentaire du canal de sélection (IBM 2860-2 Selector Channel). Il permet le transfert rapide de données entre différents emplacements de stockage. Ce transfert peut s'effectuer à l'intérieur du stockage principal, entre le stockage principal et le grand stockage central, ou à l'intérieur de ce dernier. Le canal de stockage facilite le déplacement de données et de programmes d'une mémoire à faible vitesse vers une mémoire à haute vitesse du processeur principal, et vice versa, optimisant ainsi l'utilisation du processeur haute vitesse.
Une autre configuration du 360/J75 est principalement utilisée pour les exercices de simulation. En plus des dispositifs présents dans la configuration précédente, cette version du modèle 75 prend en charge un canal spécial de processeur de simulation Apollo (ASPC), qui reçoit des données d'un démultiplexeur et distributeur multicanal (Multichannel Demultiplexor and Distributor ou MDD), d'un dispositif d'affichage IBM 2260 et d'un IBM 2844, qui sert d'unité de commande pour les lecteurs de disques IBM 2314. Le système RTOS/360 au RTCC prend également en charge plusieurs configurations différentes de l'IBM 360/50.
.
Le panneau de commandes et de contrôle de l'unité centrale
Le panneau de commande comprend les interrupteurs à bascule et les voyants nécessaires pour le fonctionnement, l'affichage et le contrôle du système, qui est constitué de l'unité centrale, de la mémoire, des canaux, des unités de contrôle en ligne et des périphériques d'E/S. Les unités de commande hors ligne et les dispositifs d'E/S font partie de l'environnement du système, mais ne sont pas considérés comme faisant partie intégrante du système lui-même. Les commandes sont logiquement divisées en trois groupes : commandes de l'opérateur, interventions de l'opérateur et commandes techniques. Trois fonctions de commande sont possible pour l'opérateur :
1) Réinitialiser le système.
2) Stocker et afficher des informations dans la mémoire, les registres, et le mot d'état du programme (PSW).
3) Charger les informations initiales du programme.
L'unité centrale de l'IBM 360/75, qui contient divers registres, des circuits pour les opérations arithmétiques et logiques, des circuits de contrôle et des portes, est composée de plusieurs cartes de circuit imprimés.Tous les voyants sur le panneau de contrôle sont directement connectés à ces circuits. Ces voyants fournissent à un ingénieur qualifié des informations instantanées sur l'état des circuits. En cas de défaillance de l'unité centrale, un ingénieur peut exécuter un programme de diagnostic pour aider à identifier le problème. Le panneau de contrôle est également très utile pour identifier la carte de circuit imprimé responsable de la panne et devant être remplacée. Les différents interrupteurs à bascule permettent à l'ingénieur d'intervenir, d'insérer des données ou des instructions sous forme de code machine (binaire) dans divers registres de l'unité centrale et de parcourir une séquence de cycles informatiques étape par étape pour effectuer des diagnostics. Les différents voyants ou indicateurs du panneau de contrôle, qui reflètent le contenu des registres, l'état des contrôles, des portes et des vérifications, ont été regroupés. Certains indicateurs sont inactifs.
L'unité centrale est équipée d'un matériel spécial, le matériel de test de localisation des défauts (Fault Location Testing ou FLT) qui aide l'ingénieur à tester les circuits de l'unité centrale. Le matériel FLT dispose d'un registre FLT Control Word de 45 bits permettant d'afficher le résultat du test sur le panneau de contrôle du système. Lorsque l'unité centrale est mise en mode FLT, des mots de test peuvent être lus depuis la bande pour vérifier les circuits. Si un circuit défaillant est détecté, le numéro d'identification du test en cours ayant échoué est indiqué dans les 18 derniers bits du mot de contrôle FLT. Ce numéro d'identification peut être consulté dans une liste pour obtenir des informations sur le circuit et les points de test associés à la défaillance.
Les commandes de l'opérateur se trouvent dans la section (D), qui contient l'interrupteur d'arrêt d'urgence, et dans la section (N), pour le démarrer le système. Les commandes d'intervention (commutateurs d'adresse pour examiner et modifier la mémoire) se trouvent dans la section (R) et la section (Q). Les autres sections sont principalement destinées à être utilisées par les ingénieurs du client. La section (M) contient 64 commutateurs de données et leurs voyants correspondants, Le voltmètre (K) est utilisé pour la vérification de la marge. Les autres sections comprennent le contrôle du bus (A), le stockage à grande vitesse (B), les instructions de longueur de champ variable (C), les commandes d'instruction (E) et les registres (F, L).
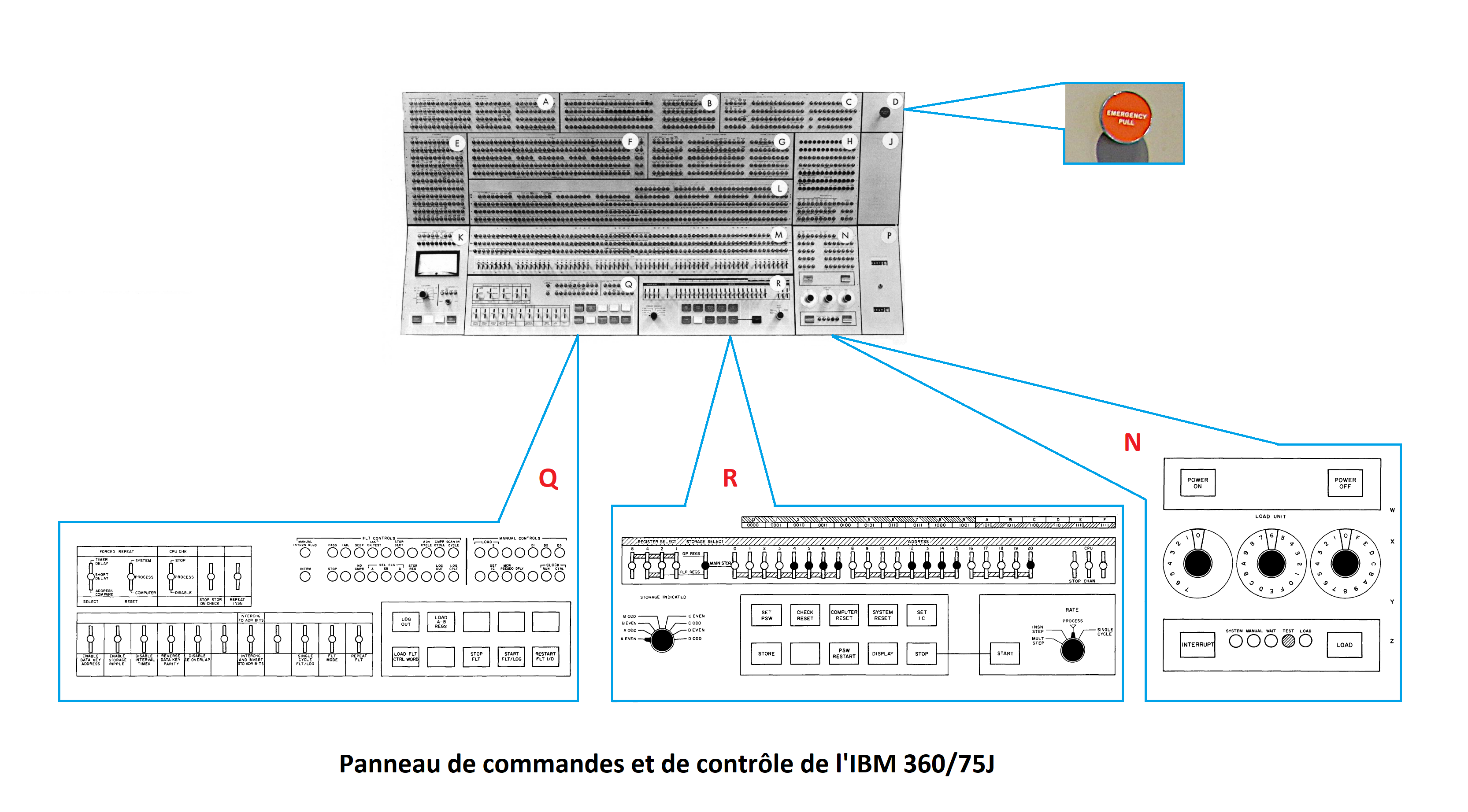
La console du modèle J75 est beaucoup plus grande que les modèles précédents et comporte un grand nombre de LED. Pourquoi cela? Pour deux raisons. Premièrement, l'architecture interne de ce modèle est particulièrement complexe. Deuxièmement, au lieu d'afficher certaines fonctions à l'aide de boutons, comme c'était le cas sur d'autres modèles, le modèle J75 utilise exclusivement des LED pour indiquer toutes ses fonctions. La largeur de cette console conduit à son installation sur ce qui pourrait être considéré comme le côté droit des armoires du processeur, si l'on prend comme référence l'emplacement typique du panneau avant des autres modèles System/360.
Le saviez vous ?? Les programmes utilisés sont extrêmement complexes. Par exemple, le programme de surveillance du vaisseau spatial et des données médicales des astronautes a une taille de 6 Mo et est considéré comme le logiciel le plus sophistiqué jamais écrit à cette époque. La sauvegarde des données est également prise au sérieux, avec un enregistrement effectué toutes les 90 minutes sur bande magnétique. Ces bandes, à 9 pistes, enregistrent les huit bits d'un octet sur les huit premières pistes, tandis que la neuvième piste contient un bit de contrôle associé à cet octet. Pour faire fonctionner le RTCC, des terminaux équipés d'écrans sont connectés par l'intermédiaire de convertisseurs (convertisseurs numérique-télévision). De plus, tout comme un ordinateur de secours est prévu au RTCC, un équipement d'affichage auxiliaire lui est dédié spécifiquement.
Solid Logic Technology
Lorsque IBM a présenté le System/360 au monde, l'entreprise a également annoncé une nouvelle technologie de circuit : la Solid Logic Technology (SLT). Cette technologie est née du désir d'IBM de produire des composants toujours plus miniaturisés pour ses ordinateurs. Les circuits intégrés, très attendus dans les années 60, ont été au cœur des recherches d'IBM, visant à développer la logique ECL (Emitter-Coupled Logic) sur une seule puce. Bien que cette recherche ait abouti, la technologie n'a été utilisée qu'à partir des années 70. Cependant, en raison de la complexité de la production de petits transistors en silicium sur un substrat de grande taille et de leur découpe, IBM choisit de recourir à une technologie hybride pour le System/360.
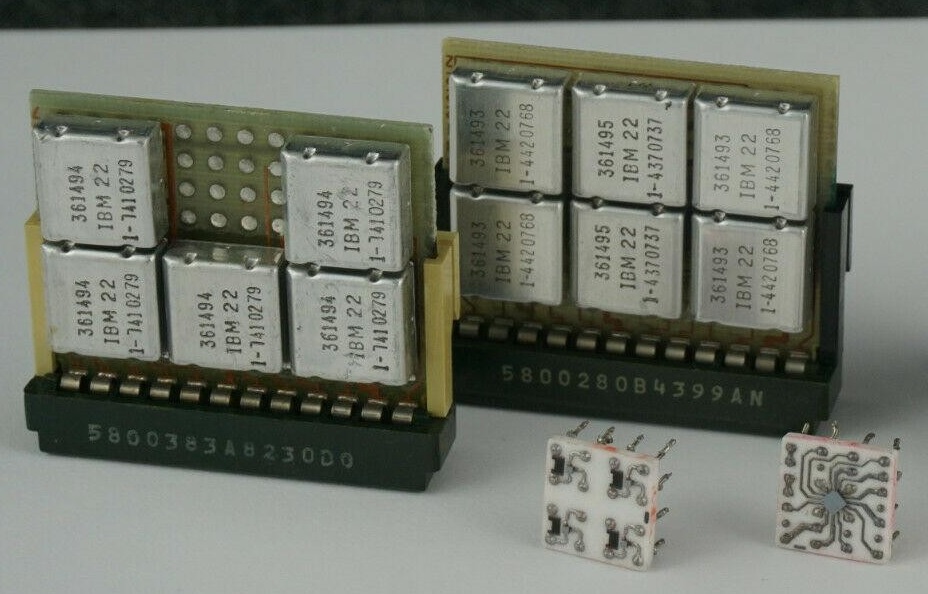
L'entreprise développe des transistors et des diodes en silicium minuscules et planaires, montés sur un support en verre, puis fixés sur une puce en céramique de 1,27 cm (1/2 pouce) de côté. Cette puce en céramique comporte 12 broches en cuivre avec des circuits métalliques imprimées qui établisent les connexions entre les broches, les transistors et les diodes. Les résistances sont formées par l'application d'encre de carbone entre deux traces, et leur valeur est ajustée en conséquence. Ces petites puces en céramique sont ensuite recouvertes d'un gel de silicone, puis protégées d'un capuchon en aluminium, avec un revêtement en caoutchouc en dessous. Ce procédé constitue ce qu'on appelle un boîtier hybride. Bien que cela ressemble à une puce de silicium, ce n'est pas un circuit intégré tel que nous le connaissons aujourd'hui. Chaque puce contient de 0 à 4 transistors ou de 0 à 8 diodes, ainsi qu'un nombre variable de résistances. Ces composants sont conçus pour permettre leur isolation et testabilité individuelle.
 |
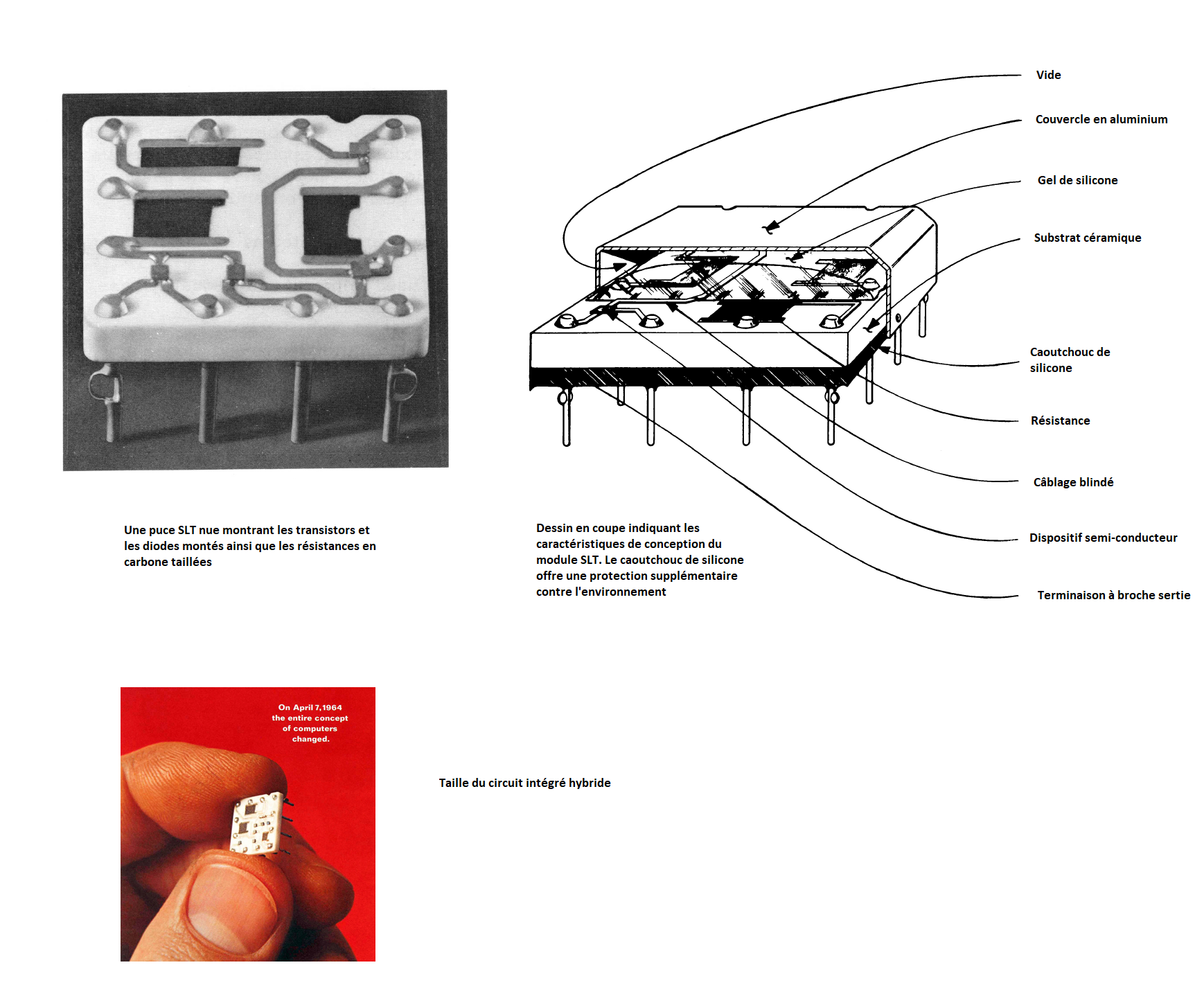 Taille et détails d'une puce SLT |
Etapes de fabrication d'une puce SLT
À voir sur la photo ci-dessus :
A) Le processus commence avec une tranche de substrat céramique vierge de 1,27 cm de côté.
B) Pose des circuits par sérigraphie en premier...
C) ... Suivis par le matériau résistif.
D) Des broches sont ajoutées...
E) ... Les broches et les circuits sont soudés...
F) ... et les résistances sont ajustées à la valeur désirée.
G) Les transistors et les diodes individuels sont ajoutés...
H) ... Et le boîtier est encapsulé.
Les puces sont ensuite assemblées sur des cartes en fibre de verre pour constituer une fonction logique. Le nombre de portes logiques sur une seule carte équivaut à celui d’une puce logique de la série 7400. Dans le document IBM's 360 and Early 370 Systems, il est indiqué que, lors de l’annonce du système pour la première fois, la logique à faible densité a été critiquée comme étant obsolète. Bien que cela soit vrai, les tests de fiabilité ont démontré que cette logique était en réalité bien plus fiable que les technologies de pointe existantes, que IBM avait d’abord écartées pour cette même raison.
Les modules SLT sont plus denses, plus rapides et consomment moins d'énergie que la génération précédente de technologies à transistors. En 1968, les modules SLT d’IBM, largement utilisés atteignent un taux de fiabilité mille fois supérieur à celui de ses prédécesseurs à tubes à vide. La technologie SLT refléte l’incertitude d’IBM au sujet de la nouvelle technologie connue sous le nom de circuits intégrés, tout en marquant une volonté claire de s’éloigner de l’ancienne technologie des transistors discrets. Ces modules consomment moins d’énergie et d’espace tout en offrant une vitesse plus rapide et une fiabilité supérieure par rapport aux cartes de circuits imprimés à transistors discrets.
 Exemple de carte avec puces SLT |
En regardant comment IBM fabrique ces cartes, il est difficile de voir comment elles peuvent faillir. Le support en fibre de verre est ignifuge et résistant à l'humidité. L'aluminium qui recouvre la puce ne se corrode pas. Et il y a plusieurs couches d'étanchéité sur les transistors. Afin de réduire les problèmes causés par de mauvais contacts à ressort, IBM place le connecteur femelle sur la carte. Le fond de panier dans lequel il se branche n'est qu'une grille de broches plaquées or. Si un contact à ressort est défectueux, il fait partie de la carte. Ainsi, le remplacement de la carte résout le problème, ce qui est préférable à la nécessité de diagnostiquer et de remplacer un emplacement de carte cassée.
Le saviez vous ? Les ordinateurs du RTCC peuvent calculer la position du CSM avec une précision de 10 m et sa vitesse avec une précision de 50 cm.
Instruction machine : c'est une opération élémentaire qu'un programme demande à un processeur d'effectuer. C'est l'ordre le plus basique que peut comprendre un ordinateur.
KSR : pour Keyboard Send Receive.
Logique câblée : Une logique câblée est étudiée et réalisée une fois pour toutes sur un schéma donné : les fonctions sont réalisées par une voie matérielle. Elle exige un grand nombre de composants et rend les montages encombrants et chers. Enfin, elle n'offre guère de souplesse : la durée des études pour réaliser un montage donné (et donc pour le modifier le cas échéant) est longue.
RTOS/360 : (ou Real Time Operating System/360 pour système d'exploitation en temps réel du 360). Il s'agit d'une version modifiée du système d'exploitation standard IBM System/360 (OS/360), développé par la Federal Systems Division (FSD) d'IBM pour la prise en charge du Real Time Computer Complex (RTCC) pendant les vols spatiaux Apollo. À la base, L'OS/360 est un système d'exploitation pour le traitement par lots. Pour les applications en temps réel, une approche plus sophistiquée est nécessaire en ce qui concerne la gestion des interruptions et des tâches. Le RTOS/360 est multi-tâches, il étend les fonctionnalités de base de l'OS/360 et ajoute des fonctionnalités supplémentaires :
- Traiter les données en temps réel
- Simplicité d'utilisation pour le programmeur d'applications
- Assurer une réponse rapide à l'activité du système (les exigences vont d'un dixième de seconde à une seconde)
- Améliorer l'efficacité
- Prise en charge de dispositifs spéciaux non pris en charge par OS/360
- Fournir un système à sécurité intégrée
- Augmenter le débit de l'atelier de travail.
(N.D.R) : De nombreuses caractéristiques sont incorporées dans le RTOS/360 pour améliorer les performances de l'unité centrale et de la mémoire centrale, pour introduire un système de contrôle des E/S en temps réel, pour accroître la fiabilité du système, pour améliorer considérablement la gestion des tâches (pour que l'ordinateur central puisse gérer de nombreuses tâches en temps réel de manière quasi simultanée) et des données ainsi que pour améliorer les utilitaires de surveillance et de gestion de l'opérateur.
Textes traduits de l'anglais, sources : Documents PDF : IBM System/360 Model 75 Functional Characteristics (IBM Systems Reference Library), SLT Circuit Design Handbook IBM, IBM journal avril 1964, RTOS-Extending OS /360 for real time spaceflight control de la collection du "Computer History Museum" (www.computerhistory.org)
texte de Paul Cultrera, tous droits réservés.