LE MANNED SPACEFLIGHT NETWORK
![]()
Le Manned Spacecraft Center (MSC) de Houston ne serait rien sans l'appui du réseau mondial appelé Manned Spaceflight Network (MSFN prononcé “Misfin", en Français réseau pour les vaisseaux spatiaux habités). Il joue un rôle essentiel dans les missions lunaires car il constitue l'unique lien entre la Terre et les trois occupants du vaisseau Apollo. Il est placé sous le contrôle du centre Goddard de Greenbelt (Maryland) qui en est la plaque tournante (le centre névralgique), celui-ci dirigeant toutes les opérations de poursuites et de communications.
Ce vaste complexe global est réparti stratégiquement, couvrant ainsi trois continents et trois océans. L'ensemble est interconnecté à l'aide de lignes terrestres, de câbles sous-marins, ainsi que par ondes radio et liaisons satellite. Le MSFN a été utilisé dès des premiers vols orbitaux Mercury (Mercury-Atlas 6, celui de John Glenn), puis renforcé avec l'avènement des programmes Gemini et Apollo.
Le MSFN s'est accru sensiblement et son équipement s'est également renforcé pour soutenir des missions d'explorations lunaires. Le réseau se compose (chiffres de 1969) de 10 stations avec des antennes de 9 m, de 3 stations avec des antennes de 26 m, de 1 antenne transportable de 9 m située à Grand Bahama Island, de 4 bateaux équipés (leurs zones de travail sont choisies en fonction de la mission), et de 8 avions (A/RIA)
Le MSFN est formé par le Deep Space Network (DNS, littéralement "réseau de l'espace profond") et le NASA Communication Network (NASCOM). Ces deux entités regroupent des stations de repérage (visuelle et télémétrique), de communication au sol, ainsi que des bateaux et avions chargés de collecter et de retransmettre toutes les données d'un vol Apollo au MSC.
Pour la première phase (lancement, ascension et délai d'attente en orbite terrestre), le MSFN dépend en grande partie de sa chaîne de stations équipées d'antennes de 9 m (30 ft) de diamètre. La deuxième phase commence lorsque le vaisseau se déplace au delà de 16 000 km (10 000 miles) de la Terre (après la TLI). Dès lors, ce sont les antennes de 26 m de diamètre (85 ft) qui prennent le relai avec leurs puissance et précision accrues. Le réseau doit fournir un contact fiable et instantané avec les astronautes, leur véhicule de lancement et leur vaisseau spatial, depuis le décollage jusqu'à l'amerrissage dans l'océan Pacifique, en passant par l'orbite terrestre, l'alunissage et le décollage lunaire.
Tous les éléments du réseau sont prêts dès le début du compte à rebours. Lorsque Apollo décolle de Cap Kennedy, les voix et les données sont transmises instantanément à Houston. Les données sont envoyées directement aux ordinateurs pour être affichées sur les consoles des contrôleurs de vol.
La chaîne internationale des stations au sol
Les stations au sol sont réparties tout autour du globe, certaines possédant des antennes de 9 m et d'autre, géantes, de 26 m. Les antennes de 9 m se situent sur Merritt Island (Floride), sur l'île de la Grande Bahama, sur le navire USNS Vanguard stationné en Atlantique, aux îles Canaries, à Carnarvon (Australie), à Hawaii; sur les navires (USNS Redstone, USNS Mercury et USNS Huntsville) stationnés dans le Pacifique, sur l'île de Guam, à Guaymas (Mexique) et enfin à Corpus Christi (Texas).
Ces stations servent essentiellement à la première phase de la mission, cela ne veut pas dire qu'elles cessent leurs activités pendant la deuxième phase mais seulement que leurs antennes n'ont qu'un faible rendement à grande distance.
 Antenne de 9 m au centre Goddard. |
 Antenne de 9 m à Carnarvon. |
LE DEEP SPACE NETWORK
On compte trois stations équipées d'antennes de 26 m de diamètre (et supérieur), situées sur le site de Fresnedillas, environ 50 km à l'ouest de Madrid (Espagne), à Goldstone, 72 km au nord-est de Barstow (Californie) et à Honeysuckle Creek, à 40 km de Canberra (Australie). Elles servent pour la deuxième phase de la mission. Ces trois emplacements sont distants d'environ 120° les uns des autres, de sorte qu'à tout moment l'un d'eux au moins est en liaison directe avec le vaisseau spatial (et accessoirement avec le LM sur la surface lunaire). De cette manière, le flux des données et les communications sont maintenus 24 heures sur 24. Chaque complexe abrite une antenne à haut gain de 34 mètres (111 ft), une ou plusieurs antennes de 34 m à guide d'onde à faisceau (il y en a 3 à Goldstone, 2 à Madrid et une en Australie). Le système à guide d'onde permet de répartir les données reçues entre plusieurs enregistreurs, une antenne de 26 m (85 ft) et une antenne géante de 70 m (230 ft).
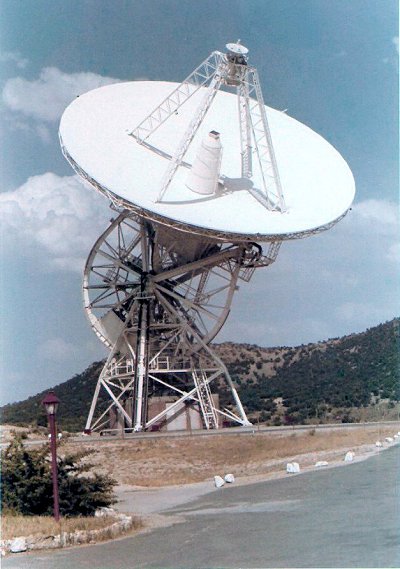 Photo (Larry Haug) de la station située à Fresnedillas. |
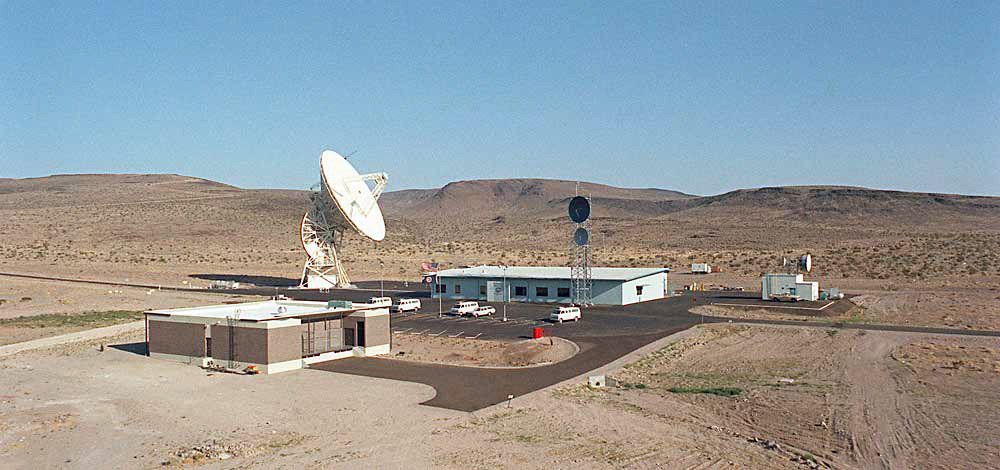 Goldstone 1970, antenne de 26 m. |
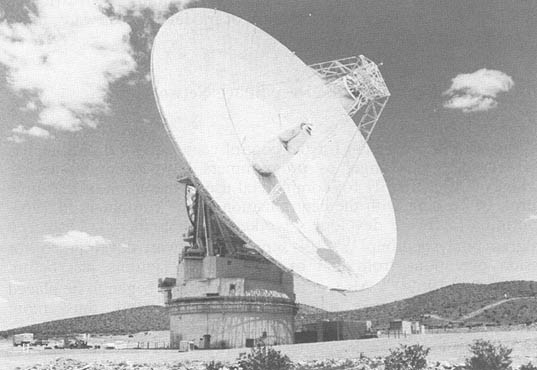
 L'antenne d' Honeysuckle Creek, photo prise par Hamish Lindsay. |
En complèment, le MSFN utilise l'antenne de 64 m (210 ft) du JPL (Jet Propulsion Laboratory) située à Goldstone ainsi que celle de Parkes en Australie (même dimension) en soutien lors de l'atterrissage lunaire et des activités extravéhiculaires chaque fois que possible.
 L'antenne de 64 m du JPL à Goldstone. |
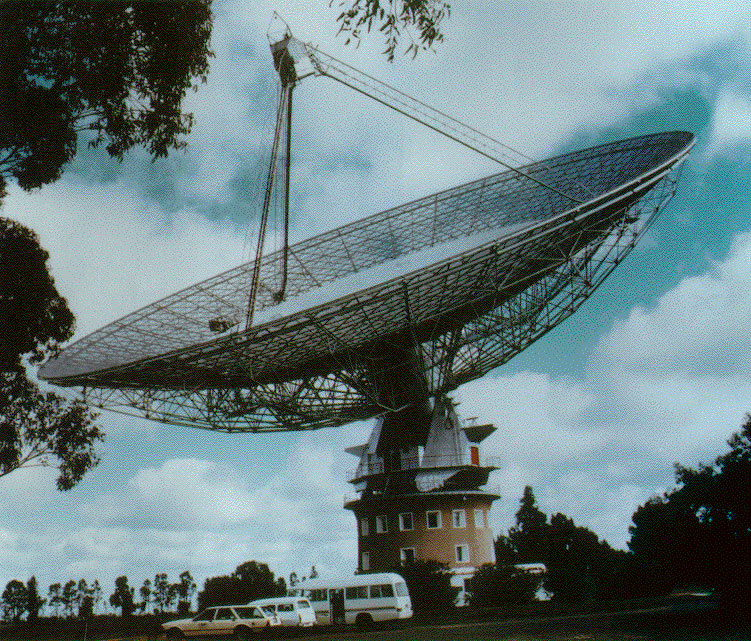 L'antenne de Parkes en Australie. |
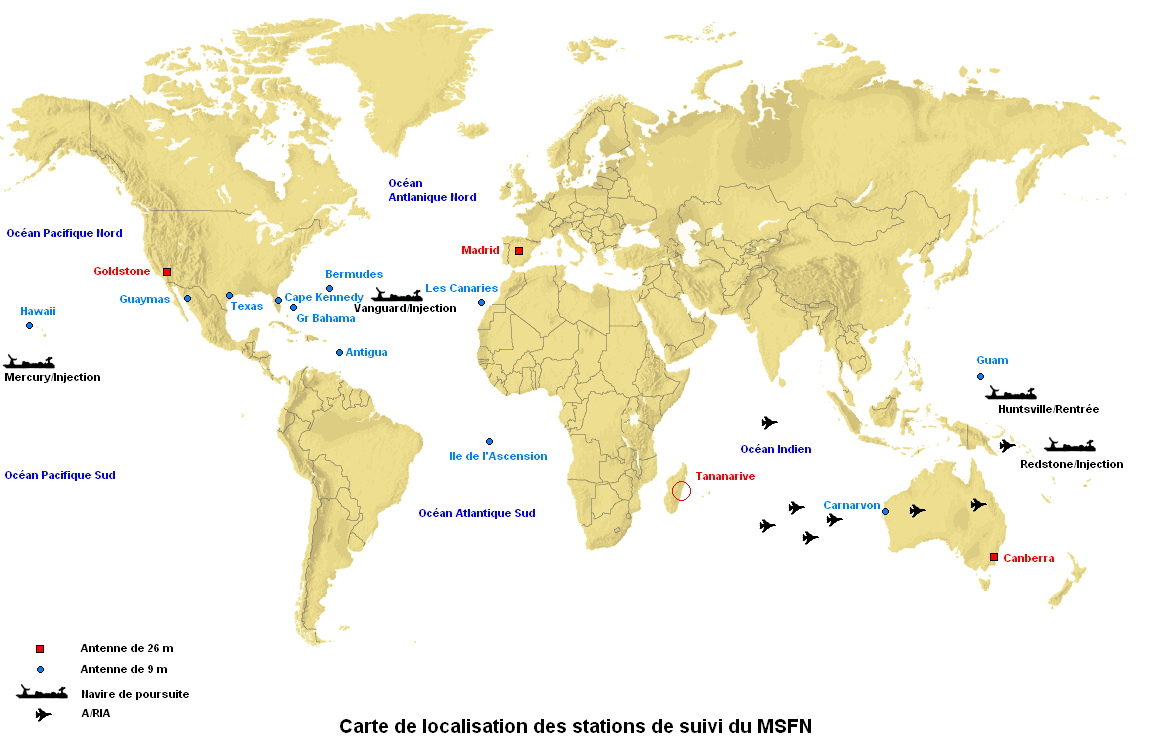
Voici la carte de localisation des différentes stations au sol ainsi que les navires et les avions A/RIA (Apollo Xi).
LES NAVIRES DE POURSUITE
La mission est soutenue par quatre navires opérant en tant que stations intégrales du MSFN pour fournir une couverture dans les zones situées au-delà de celle des stations terrestres. Les navires USNS Vanguard, Redstone, Mercury, Huntsville et Watertown assurent la poursuite, la télémétrie et les communications pour la phase de lancement, l'insertion en orbite terrestre, l'injection translunaire, et l'entrée dans l'atmosphère.
 USNS Vanguard |
 USNS Redstone (photo du site Shipscribe) |
 USNS Mercury (photo du site NavSource Online) |
 USNS Huntsville (photo du site Shipscribe) |
Les navires sont mis au point conjointement par la NASA et le Département de la Défense (DOD) qui exploite les navires tant pour le support d'Apollo que d'autres missions de la NASA ou de ce même département sur une base où les exigences du programme Apollo sont prioritaires.
Navire de classe 19
Les modifications réalisés sur les navires de classe 19 consistent à adjoindre aux sections avant et arrière d'un tanker T-2 une nouvelle longue section centrale, fournissant un espace suffisant pour les systèmes d'instrumentation, de soutien matériel, de stockage, et pour le personnel. Les USN Vanguard, Redstone, Mercury emportent chacun 17 officiers, 71 membres d'équipage et 122 personnels techniques incluant les contrôleurs de vol de la NASA.
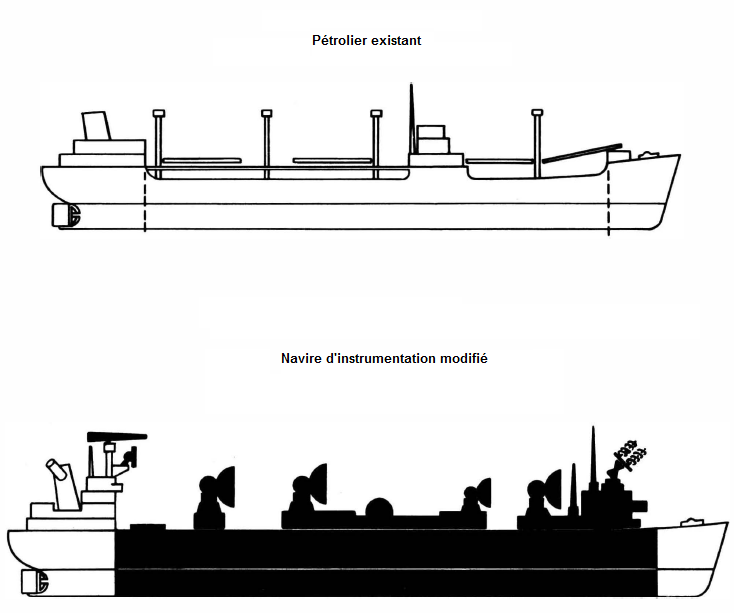 Classe 19 : Avant / Après modifications |
 (1) antenne d'enregistrement périodique, (2) antenne de télémétrie UHF à moyen gain, (3) antenne à bande-S unifié, (4) dôme du traqueur d'étoile, (5) antenne du traqueur de la bande-C, (6) antenne terminale SATCOM, (7) antenne fouet HF, (8) antenne de contrôle de commande. |
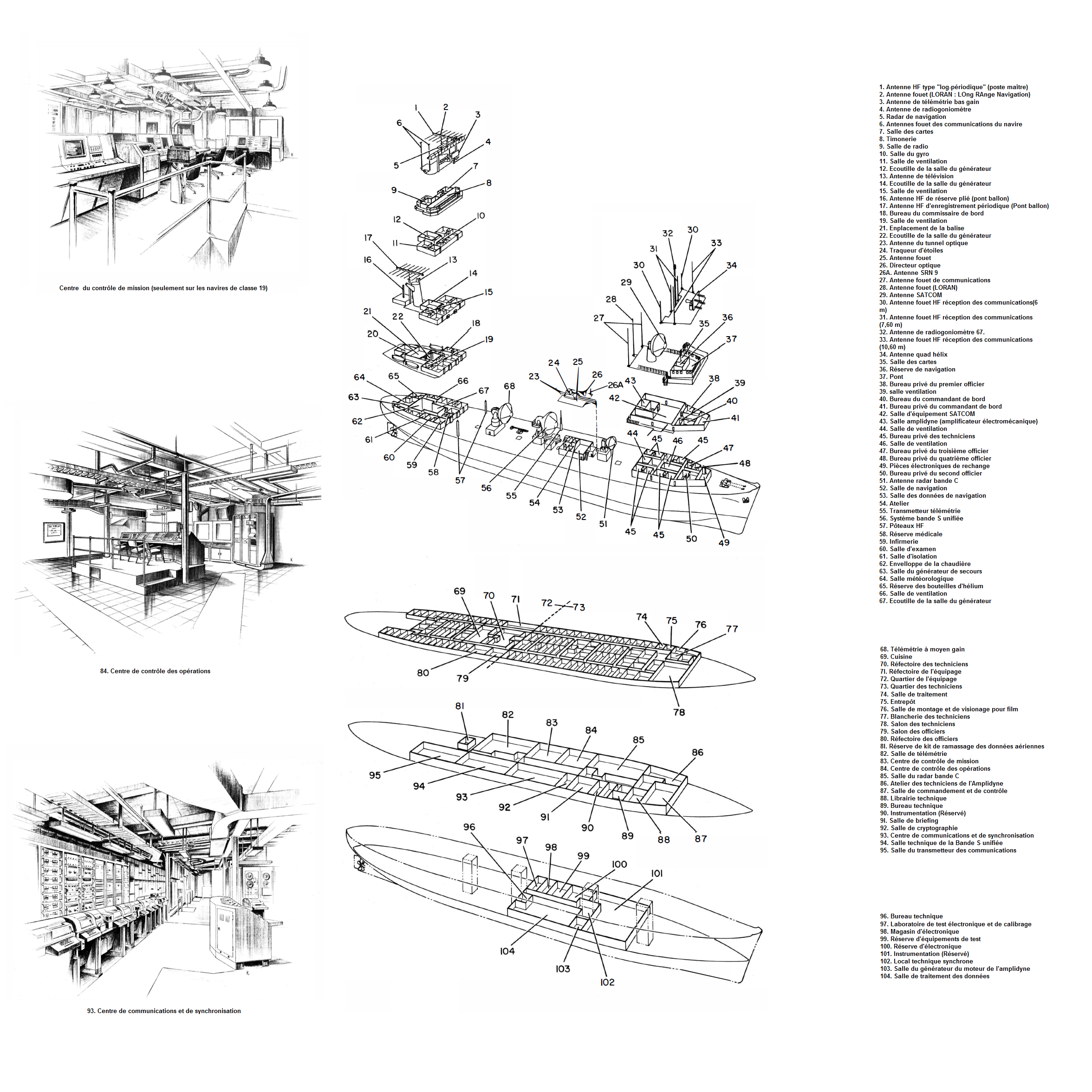 Vue en éclaté du navire classe 19 :T-AGM-19 AIS (Vanguard) |
Quid :
Longueur hors tout : 182 m
Largeur hors tout : 23 m
Tirant d'eau à pleine charge : 7,60 m
Déplacement à pleine charge : 23 310 tonnes
Vitesse de poursuite : 13 noeuds
Vitesse standard : 15 noeuds
Vitesse maximale : 17 noeuds
Puissance par ligne d'arbre : 10 000 chevaux
Rotation de l'arbre (en tr/min) : 106
Capacité en eau potable : 360 tonnes
Capacité en fioul : 3724 tonnes
Endurance maximum en position : 20 150 milles nautiques
Navire de classe 6
La classe 6 (USN Hunstville et Watertown) sont d'anciens navires "Victoire" qui ont fait l'objet d'une reconversion afin de fournir un appui pour la phase de rentrée atmosphérique d'un vol lunaire du programme Apollo. Ces deux navires emportent chacun 14 officiers, 56 membres d'équipage et 72 personnels techniques incluant les contrôleurs de vol de la NASA.
 Le navire Huntsville (photo du site Shipscribe) |
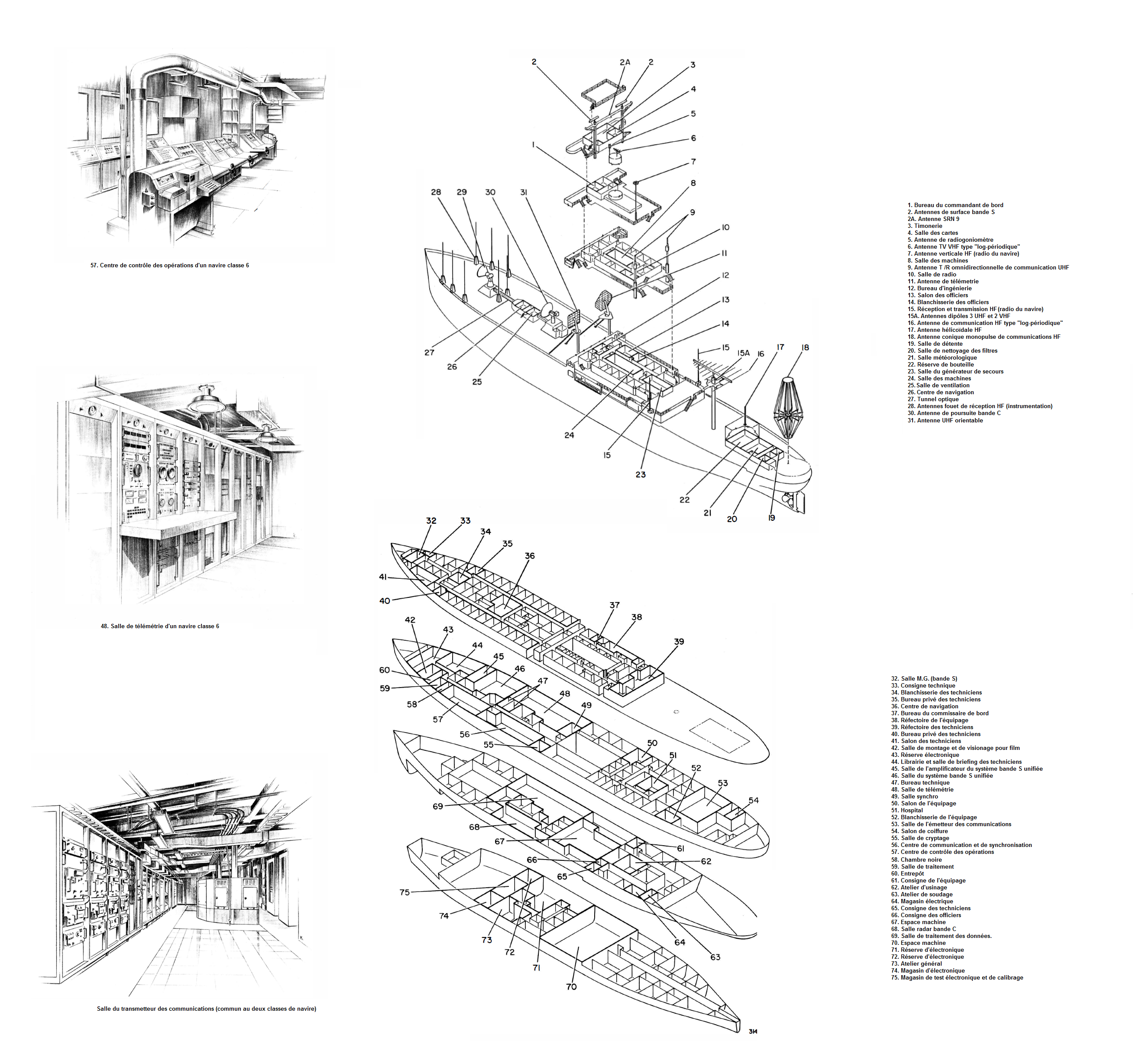 Navire de classe 6 : T-AGM-6 AIS (Watertown) et T-AGM-7 (Hunstville) |
Quid :
Longueur hors tout : 139 m
Largeur hors tout : 19 m
Tirant d'eau à pleine charge : 7,15 m
Déplacement à pleine charge : 12 199 tonnes
Vitesse de poursuite : 13 noeuds
Vitesse standard : 15 noeuds
Vitesse maximale : 16,5 noeuds
Puissance par ligne d'arbre : 6000 chevaux
Rotation de l'arbre (en tr/min) : 92
Capacité en eau potable : 168 tonnes
Capacité en fioul : 2645 tonnes
Endurance maximum en position : 10 000 milles nautiques
Les navires de classe 19 et de classe 6 sont programmés pour des périodes de service en mer allant jusqu'à 60 jours. Le temps passé au port pour l'approvisionnement, le ravitaillement en combustible et le congé à terre est relativement court, mais entre chaque mission d'appui, les bateaux restent à quai pendant ces périodes. Les ports sont sélectionnés de manière à réduire au minimum les temps de navigation du port à la zone de mouillage et retour.
Bon à savoir : Le Watertown fut un temps prévu de faire partie de la force de récupération du vol Apollo VIII, mais au final il a été supprimé du programme.
Exemple de positionnement pour le vol Apollo XI
Le Vanguard est stationné environ 1800 km au sud-est des Bermudes (25° Nord , 49° Ouest) afin d'assurer la couverture Bermudes - Antigua lors de l'insertion en orbite. Il fait aussi partie de la flotte Atlantique de récupération en cas de lancement avorté.
Les USNS Redstone (2,25° Sud, 166,8° Est), USNS Mercury (10° Nord, 175,2° Ouest) et USNS Huntsville (3,0° Nord, 154,0° Est) forment un triangle de stations mobiles entre les stations MSFN de Carnarvon et d'Hawaii pour la couverture allant jusqu'à la mise à feu de l'injection translunaire. Dans le cas où la date de lancement est reportée après le 16 juillet, les navires se déplacent tous dans une direction générale Nord-Est afin de couvrir la modification de l'emplacement de l'injection translunaire.
Les USNS Redstone et Huntsville sont repositionnés pour assurer la poursuite, la télémétrie et les communications lors de la rentrée dans l'atmosphère et l'amerissage. Ils vont suivre Apollo depuis environ 1800 km, lors du blackout des communications, et jusqu'à ce qu'il passe sous l'horizon, où la capsule est reprise par l'ARIA.
L'AVION A/RIA
A/RIA : Cet acronyme désigne huit avions-cargos à réaction C-135A spécialement modifiés en EC-135N A/RIA (Apollo/Range Instrumented Aircraft, surnommé Boeing "Gros Nez") pour fournir un relais aéroporté voix et télémétrie du vaisseau spatial Apollo pendant les parties critiques du TLI et les phases de rentrée des missions lunaires. Pour mettre en œuvre le concept, la NASA et le DoD (Department of Defense) ont conjointement financé la modification de ces huit appareils. Ils sont opérés pour la NASA par l'Air Force Eastern Test Range. C'est le Goddard Space Flight Center qui les a conçus. La section du nez est modifiée pour loger le réflecteur de l'antenne bande S de suivi (tracking) d'un diamètre de 2,13m, et l'intérieur est configuré pour contenir tout équipement électronique de soutien nécessaire.
McDonnell-Douglas à Tulsa (Oklahoma), a exécuté les modifications du fuselage et Bendix Field Engineering Corporation a effectué la conception et l'installation de l'appareillage électronique. L'A/RIA devient opérationnel en janvier 1968, pour un coût de base de $4,5 millions (par appareil).

On note également l'installation de plusieurs antennes, le réaménagement de la cabine pour loger les consoles et les opérateurs PMEE, et des changements importants dans les systèmes électriques et de climatisation. L'ensemble des modifications augmente la masse brute de l'EC-135N (sans carburant) à environ 9072 kg de plus que le C-135A de base. Les principales installations et les changements de l'avion comprennent :
a) Un radôme de nez et son carénage abritant une antenne parabolique VHF / UHF
b) Des antennes sondes HF avec carénages associés sont installés sur les deux ailes à la station 714
c) Une antenne long-fil est installée le long de la ligne centrale du fuselage inférieur à la station 800 ;
d) Les antennes de transfert de données sont situées sur la ligne centrale du fuselage inférieur, à peu près à la station 500 ;
e) Les panneaux de plancher de la cabine sont remplacés par des panneaux de contreplaqué ;
f) Les consoles PMEE et les sièges des opérateurs sont installés dans la zone de la cabine, de la station 575 à la station 1050 ;
g) Deux aires de repos, à l'avant et à l'arrière, sont définies ;
h) Installation de revêtements de fuselage, de cloisons en nid d'abeilles et de tapis de sol pour absorber le bruit ;
i) Remplacement des groupes électrogènes par quatre génératrices sans balais de 40 KVA, une sur chaque moteur ;
j) Réaménagement des conduites d'air conditionné pour améliorer sa distribution aux opérateurs PMEE et aux zones de repos ;
k) lnstallation d'un système d'oxygène gazeux.
 Vue rapprochée d'un A/RIA avec la trappe d'accés équipage ouverte |
 Réflecteur de l'antenne bande S à nu |
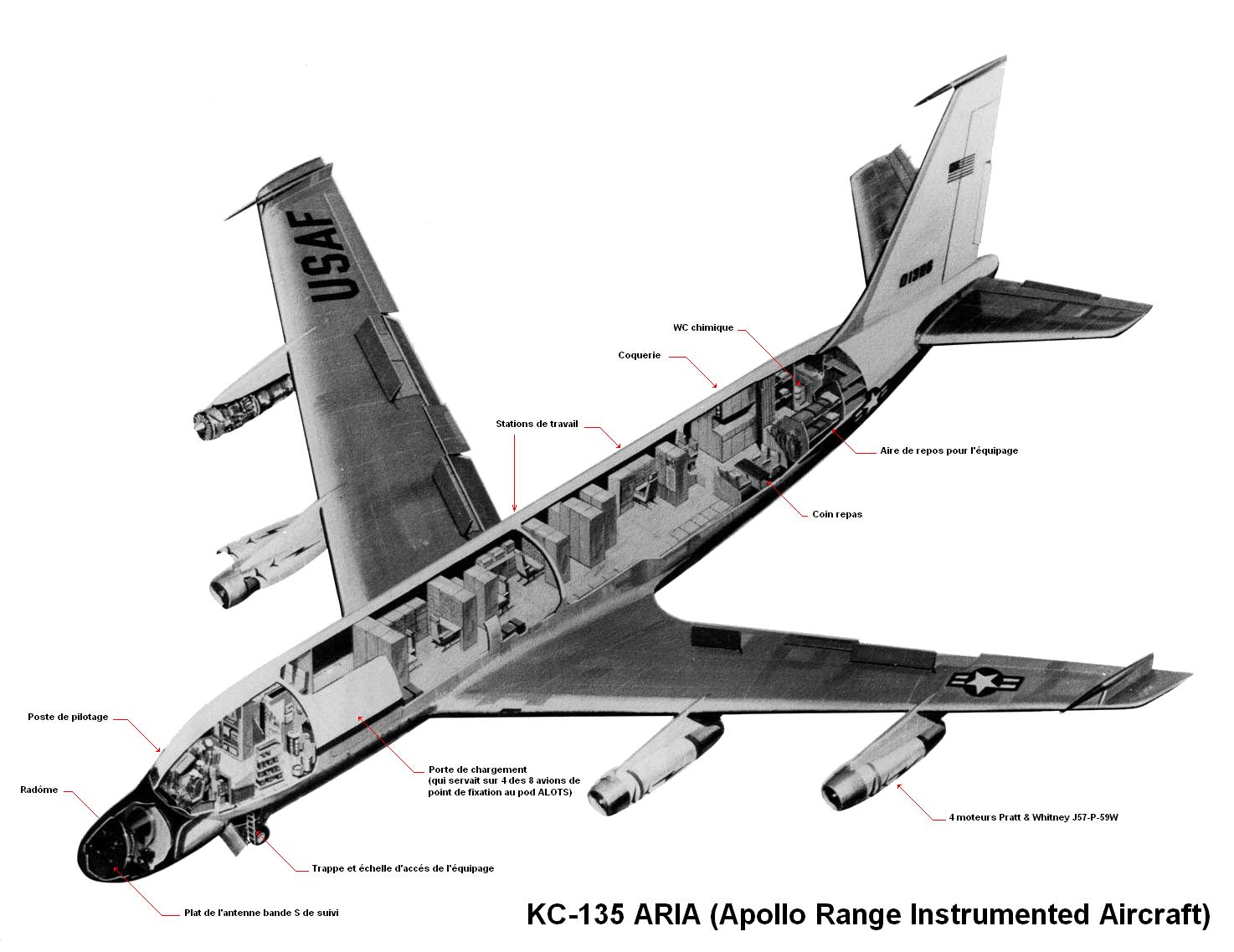 Une vue éclatée de l'A/RIA |
Spécifications techniques :
Longueur : 43,12 m (141,5 ft).
Hauteur : 12,71 m (41,7 ft).
Envergure : 31,63 m (103,8 ft).
Masse : 136 304 kg (300 500 lbs).
Armement : Aucun.
Moteur : Quatre turboréacteurs TF-33-PW-102 (JT3D) de Pratt & Whitney de 8164 kg (18 000 livres) de poussée chacun.
Équipage : 11 (2 pilotes, 1 navigateur, 1 mécanicien de bord, 1 contrôleur de mission, 6 opérateurs en électronique)
Numéro de série : 60-374.
Performances :
Vitesse de croisière maximum : 907 km/h (490 nœuds).
Vitesse de croisière normale : 796 km/h (430 nœuds).
Altitude maximum d'opération : 10 058 m (33 000 pi).
Rayon d'action : de 5185 km à 8333 km (2800-4500 milles nautiques) sans réapprovisionnement en combustible durant le vol (selon la mission et l'équipement porté).
Chaque A/RIA est doté d'un radôme de 304 cm (10 ft) ajouté au nez de l'appareil. À l'intérieur de ce radôme bulbeux se trouve la plus grande antenne dirigeable aéroportée au monde (à l'époque), une parabole de 228 cm (7,5 ft) utilisée pour la télémétrie et la réception des communications. En plus du nez "droop snoot" (nez tombant), l'EC- 135N possède une antenne sonde sur chaque extrémité d'aile pour l'émission et la réception de hautes fréquences (HF). D'autres modifications extérieures comprennent une antenne de selle encastrée dans la queue, une antenne d'aileron à très haute fréquence (VHF) d'environ 9 cm (3,5 in) et une antenne à ultra haute fréquence (UHF) encastrée sur le dessous de l'avion. Une antenne HF à fil traînant est également montée sur le ventre de l'avion et peut être étendue à des longueurs variables allant jusqu'à 36,5 m (120 ft) lorsque l'avion est en vol.
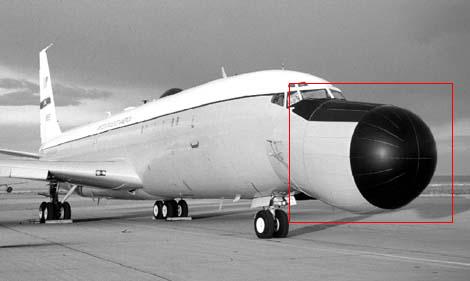 Vue du nez de l'appareil (logement de l'antenne de suivi) |
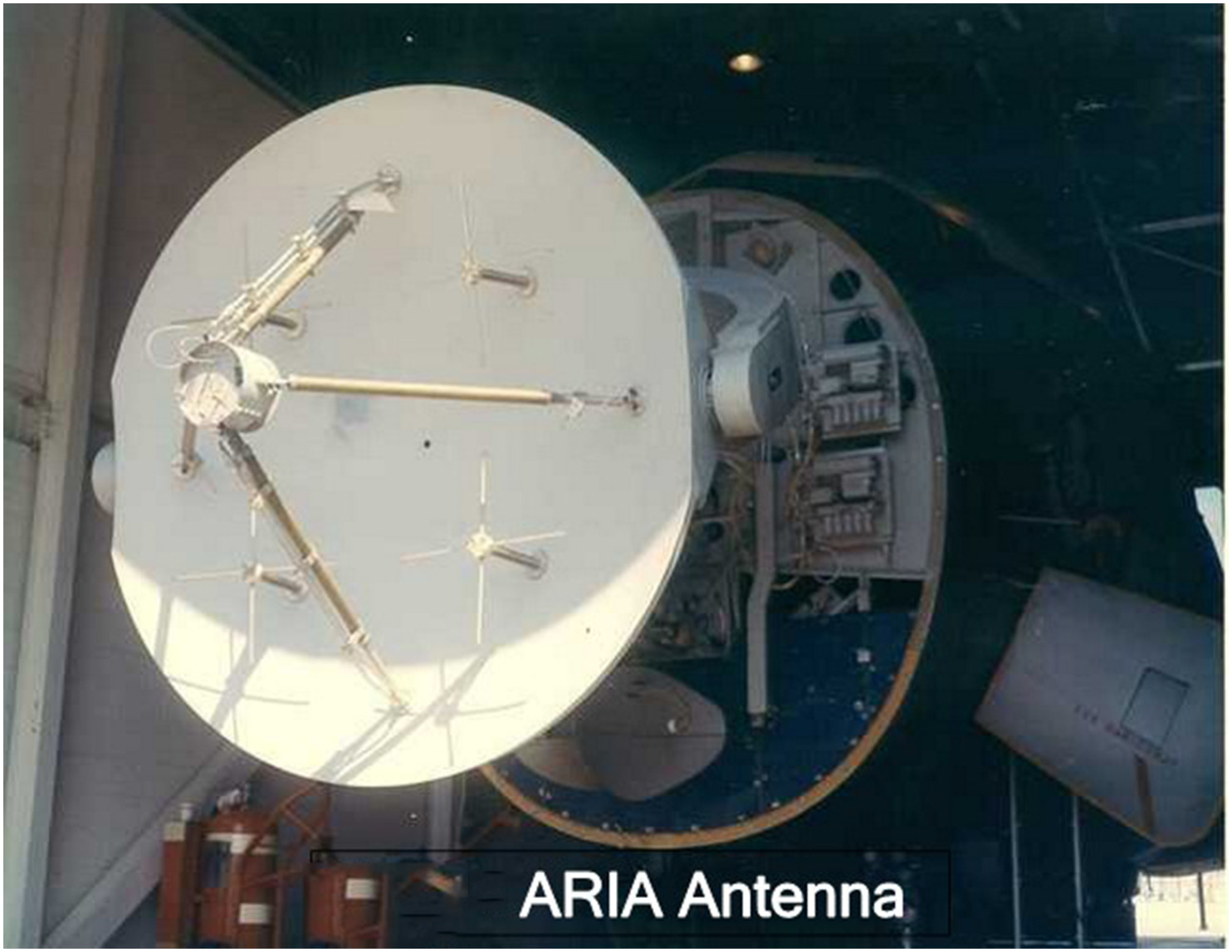 Vue de face de l'antenne radar |
 Mise en place de l'antenne radar (photo Gary Roland, restauration Colin Mackellar) |
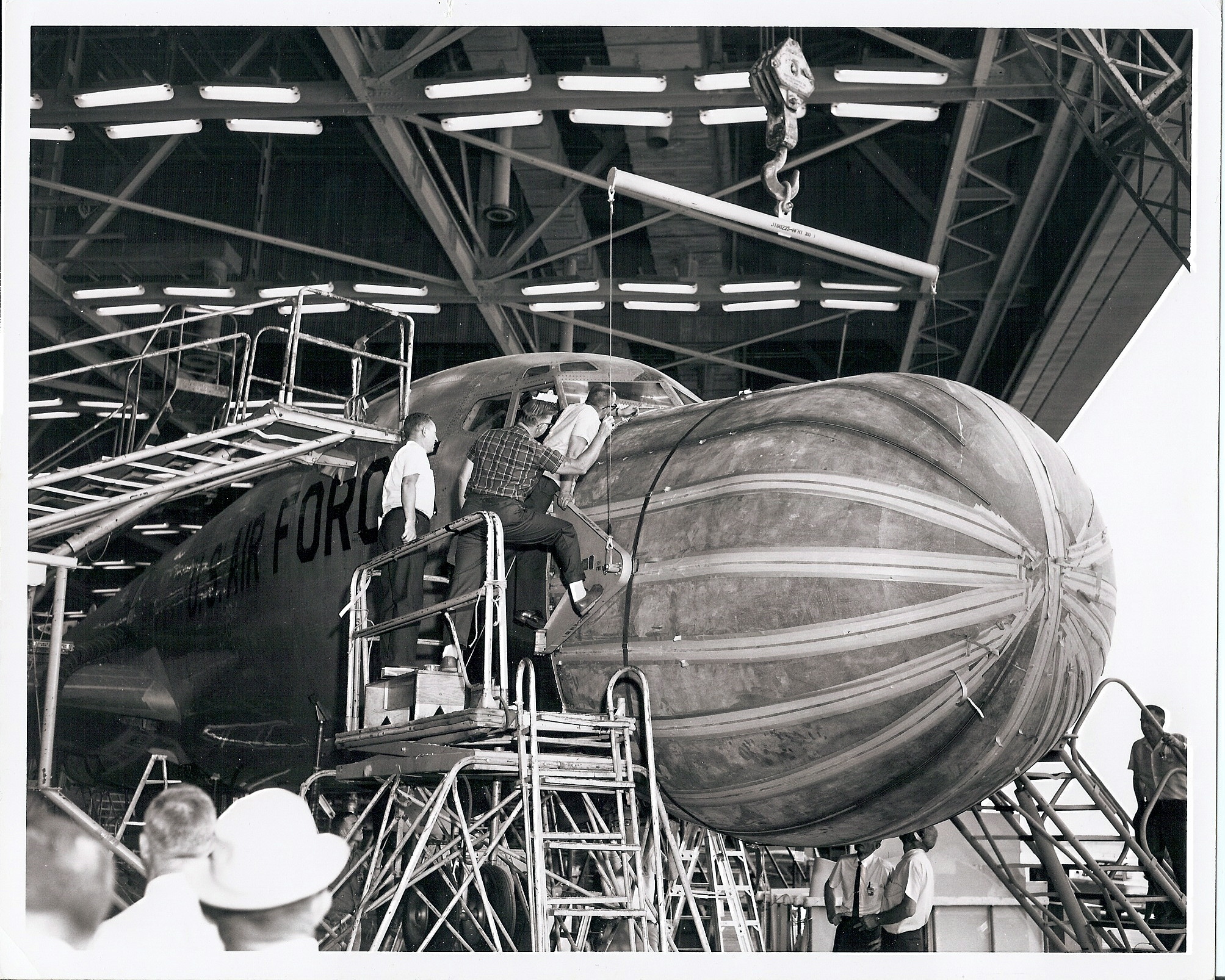 Fixation du nez (photo Gary Roland, restauration Colin Mackellar) |
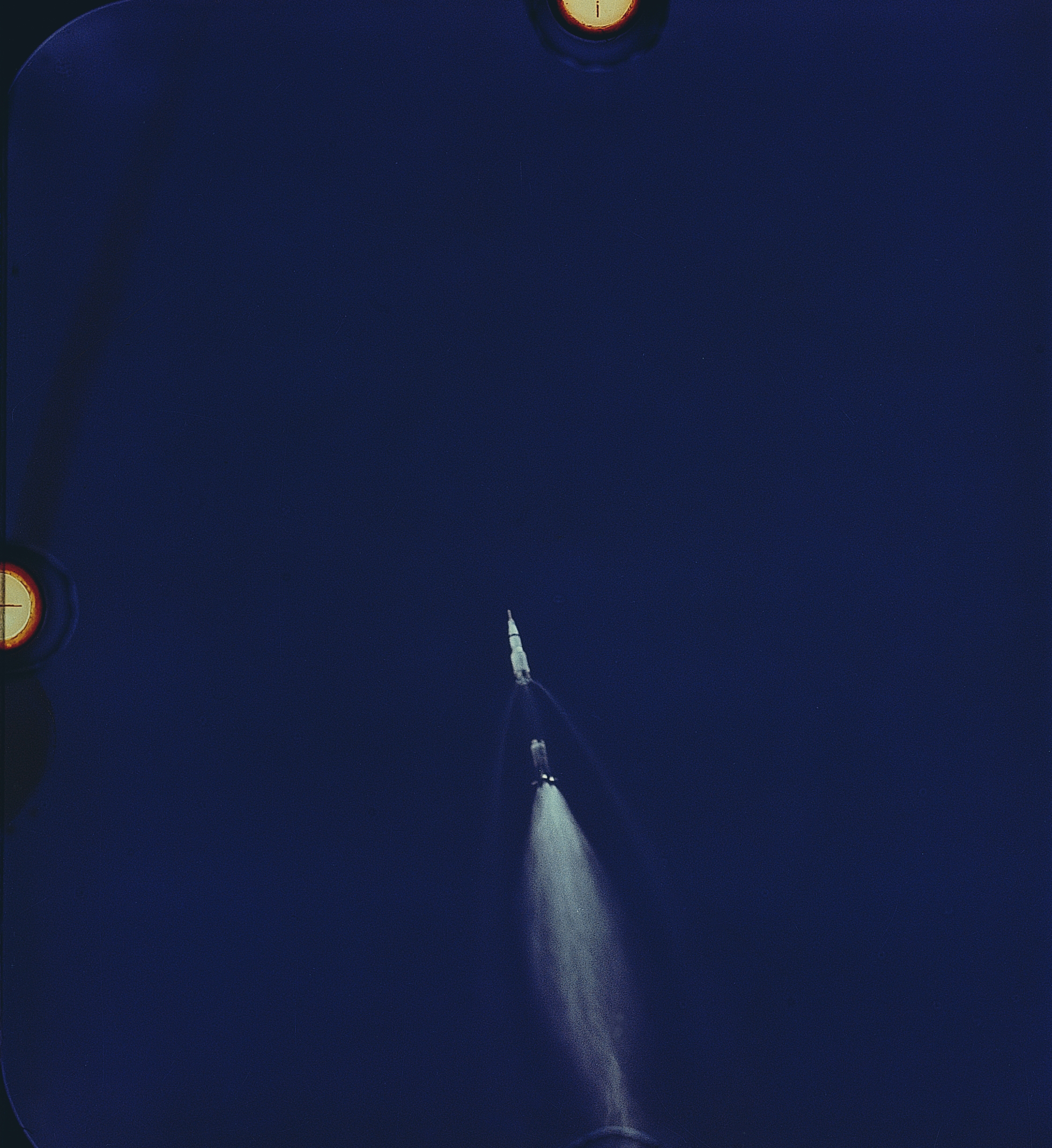
Quatre avions sont aussi modifiés pour utiliser une nacelle A-LOTS (Airborne Lightweight Optical Tracking System pour système aéroporté léger de suivi optique). Construites par la division Nortronic de la Northrop Corporation, elles sont livrées à l'Eastern Test Range en novembre 1965 et acceptées sur le plan opérationnel en décembre 1966. Ce système se compose d'une station de poursuite manuelle, d'une nacelle abritant un capteur optique et une caméra argentique de 70 mm à grande vitesse, ainsi que d'une console de commande. La cible est visuellement observée depuis un viseur de canon B-50 à travers un astrodôme transparent monté au sommet de l'avion. La nacelle est montée sur la porte de chargement du KC-135 et peut être adaptée à l'avion quand cela est nécessaire. Elle est asservie à la station de poursuite et contient essentiellement la caméra stabilisée orientable munie d'un énorme téléobjectif, capable de photographier des objets de 3 m à 320 km de distance. L'image initiale est visualisée au pupitre de commande sur un système de télévision en circuit fermé, dont le champ de vision est grossier. L'image est ensuite captée et suivie automatiquement ou manuellement, telle que visualisée sur un second moniteur vidéo dans un champ de vision plus fin. Cette caméra photographique fonctionne de 10 à 80 images par seconde pour enregistrer les événements tels que la coupure et la séparation du booster. Le panneau de commande de la caméra affiche la fréquence d'images et contient la commande de l'obturateur à distance. Le contrôle de l'obturateur permet des temps de réglage et d'exposition à ces fréquences d'images variables.
- Le poste de suivi manuel est situé à la station 480 du fuselage. Sur l'avion NKC-135 A-LOTS d'origine, elle était située à la station 710 du fuselage (photo ci-dessous à gauche). La bulle de l'A-LOTS a été déplacée vers l'avant, à la station 480. Cet emplacement place l'astrodôme et ses équipements associés à proximité de la porte cargo, regroupant ainsi les équipements A-LOTS dans une même zone.
- La console de commande est située sur le côté droit de l'avion, au poste 520. C'est le point central de distribution de toute l'alimentation électrique de l'avion vers l'A-LOTS. Elle contient également toutes les commandes et tous les indicateurs nécessaires au fonctionnement du système. Parmi ces derniers, on trouve deux écrans de télévision. L'un d'eux affiche le champ de vision grossier (cinq degrés et demi) et l'autre, le champ de vision fin (zéro degré, 39 minutes). Une commande proportionnelle permet de contrôler manuellement le cardan en cas de défaillance du système de poursuite.
L'alimentation électrique de l'A-LOTS a été modifiée afin qu'elle puisse fonctionner à partir de l'alimentation électrique de l'avion plutôt qu'à partir de sa propre source d'alimentation séparée.
- Le système de poursuite automatique et le système optique sont intégrés dans un ensemble unique contenu dans une nacelle, qui est montée à l'extérieur sur la porte cargo avant. Deux capteurs vidicon de poursuite et une caméra d'enregistrement sont intégralement fixés à un boîtier de télescope T/16 de 508 cm (200 in). L'ensemble est situé sur le cardan interne d'un système de cardan à deux axes logé dans une tourelle rotative servocommandée. Le système est capable de tourner de plus ou moins 90° en élévation et de plus ou moins 30° en azimut à partir de la position 9 heures, par rapport à l'avion.
 Une vue rapprochée d'une nacelle A-LOTS sur l'avion NKC-135 A-LOTS d'origine (photo Gary Roland, restauration Colin Mackellar) |
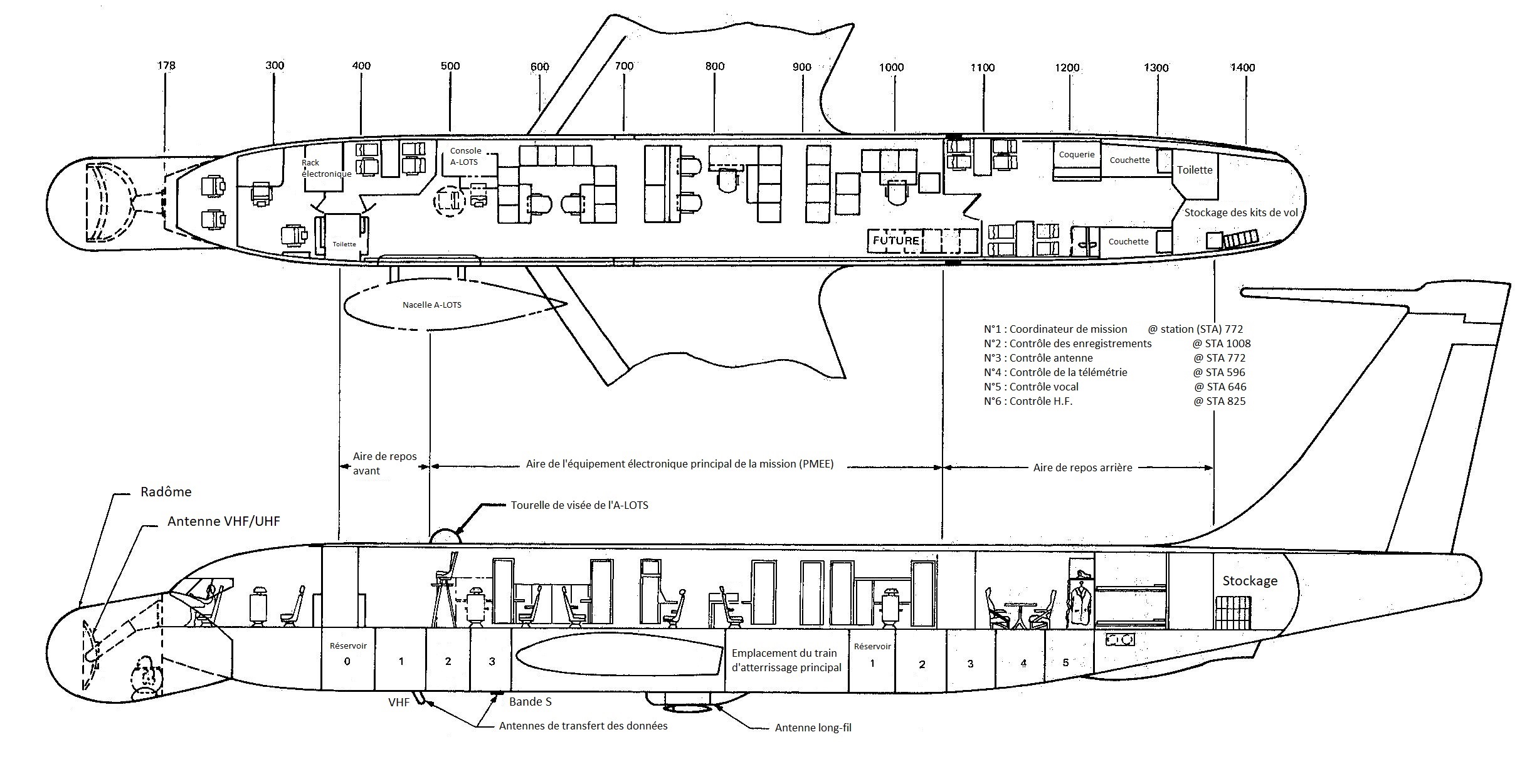 Vue de l'aménagement interne de l'A/RIA avec la nacelle A-LOTS et ses équipements regroupés |
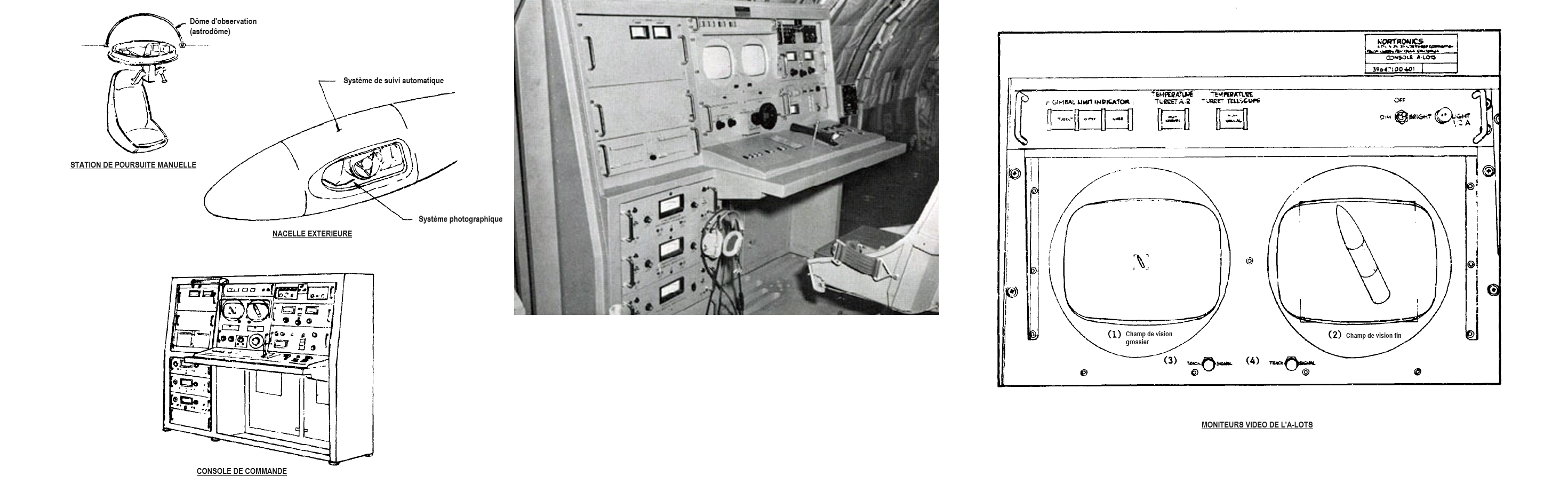 Les différents éléments du système A-LOTS |
Deux systèmes A-LOTS sont disponibles. Ils peuvent être installés, sous 48 heures, sur deux des quatre avions modifiés à cet effet. Néanmoins, l'ajout du système A-LOTS nécessite le retrait d'environ 3175 kg (7000 lb) de carburant pour rester dans la limite de masse maximum de l'avion. Son installation limite également l'altitude maximum que peur atteindre l'avion. Le centre de gravité de l' A/RIA et du système A-LOTS installé reste toutefois dans les limites précisées dans les spécifications techniques de l'appareil. La nacelle A-LOTS est fixée à la porte cargo par une entretoise inférieure et deux entretoises supérieures. La porte cargo C-13SA d'origine est conçue pour être remplaçable et non interchangeable. C'est pourquoi quatre portes cargo A/RIA sont modifiées pour accepter l'ensemble nacelle et jambe de force GFAE-A-LOTS. La modification de la porte consiste à fixer quatre supports GFAE à la structure verticale intérieure de la porte standard du C-135A. Des attaches de peau sont ajoutées pour accepter un kit de carénage aérodynamique (voir photo ci-dessous à droite) lorsque la nacelle n'est pas installé. Les carénages n'interfèrent pas avec le fonctionnement normal de la porte.
 A/RIA en vol, noter la nacelle A-LOTS |
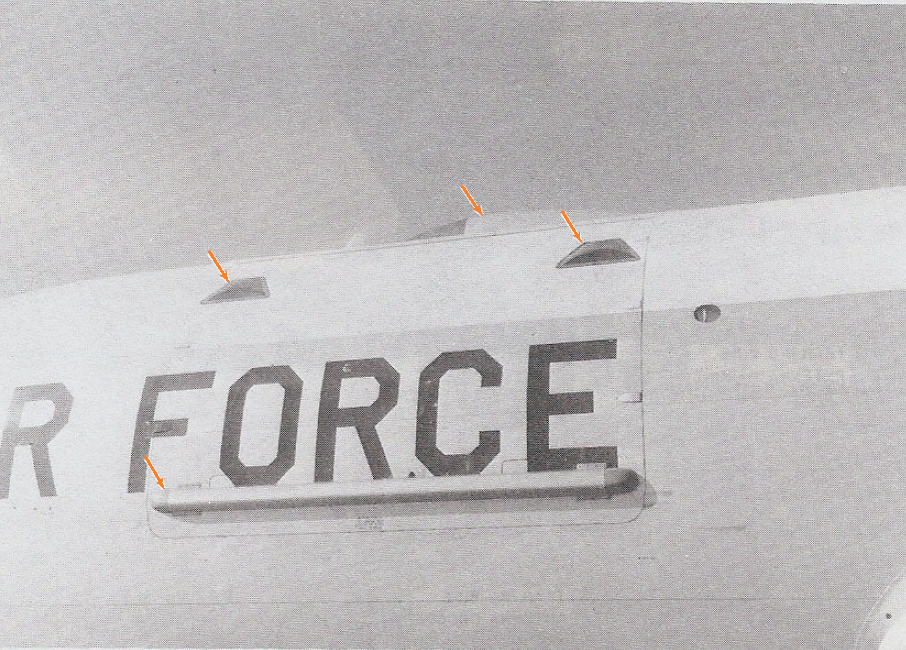 Vue rapprochée sur les carénages aérodynamiques |
Le tracking (suivi en temps réel) : c'est le processus pour déterminer l'emplacement et le mouvement d'un véhicule pendant toutes les phases de vol. C'est une communication uni ou bi-directionnelle entre les stations et le vaisseau permettant de déduire la position et la vitesse du mobile. La mesure de distance est basée sur la mesure du temps aller-retour du signal radar et la vitesse se déduit de l'effet Doppler.
L'acquisition de données : c'est la réception par une station au sol des données scientifiques et techniques produites par un vaisseau spatial. Le processus de convoyage des données du vaisseau spatial à la Terre par l'intermédiaire des ondes radio s'appelle la radiotélémétrie.
Le guidage du vaisseau Apollo
Il existe deux phases dans l'opération de guidage.
Phase 1 dite propulsive :
Sur le lanceur Saturn V, l'IU (Instrument Unit fabriqué par IBM) calcule, grâce à sa plateforme inertielle, la position, la vitesse ainsi que l'attitude du lanceur et retransmet par radio ces données à Houston pour les comparer avec celles calculées au sol (radar). L'attitude en temps réel du véhicule est comparée avec l'attitude désirée préenregistrée dans la mémoire du LVDC. L'IU calcule également les corrections nécessaires de pilotage des moteurs du lanceur (calcul local).
Toutes ces mesures sont contrôlées et envoyées par le MSFN à deux gros calculateurs (1 en secours) qui évaluent la route, la position, la vitesse tout en comparant ces mesures avec celles envoyées par le lanceur.
- Toutes les 1/2 s, mesure position, vitesse par le radar de Cap Canaveral
- Toutes les 1/2 s, mesure position, vitesse par les bateau du réseau de tracking.
- Toutes les secondes par le lanceur Saturn V lui même.
- Toutes les 2 s par le module de commande.
Les différences de fréquence de mesure s'expliquent par la puissance des ordinateurs et des chaines de transmission (radio).
Attention en cas de doute Houston peut téléguider (à l'aide de ses ordinateurs) le lanceur.
Dans le pire des cas, et si la fusée est déjà loin du sol, les astronautes peuvent la piloter eux même en s'aidant d'abaques et du chronomètre (cas extrême).
Pendant la phase d'accélération en plus de la mesure de position et vitesse par radar du Eastern Test Range, Goldstone fait une mesure Doppler et seul Goldstone a des oscillateurs (récepteurs radio) assez stables pour faire cette mesure.
Phase 2 dite navigation non propulsée : C'est toujours le MSFN et les ordinateurs de Houston qui suivent avec précision le CM-LM et assurent le suivit du plan de vol. Pour un bon contrôle d'attitude du CM-LM, la plateforme inertielle avec gyroscopes (CM) doit être recalée régulièrement. Les astronautes doivent faire ce recalage manuellement à l'aide du télescope optique pour viser l'horizon terrestre et d'un sextant pour mesurer un angle avec une étoile connue (souvent Canopée, dans l'hémisphère Sud). Dans la phase de pilotage du LM seul un télescope permet de recaler la plateforme inertielle. Bien entendu dans toutes ces phases le chronométrage est très important.
En résumé, c'est Houston avec le MSFN qui assure la navigation du vaisseau Apollo sauf en orbite lunaire où le CM-LM à une plus grande autonomie (derrière la Lune) pour manœuvrer. L'effet Doppler n'est pas la mesure principale de vitesse et donc de position, mais il intervient tout de même comme un des éléments d'évaluation.
La navigation Apollo, c'est la somme (statistique) de toutes ces mesures retransmises grâce au MSFN.
Le réseau de communication de la NASA (NASCOM, exemple du vol Apollo XI)
Le réseau de communication NASCOM est un réseau très étendu, à la pointe de la technologie (de l'époque), couvrant l'intégralité du globe et reliant toutes les stations de suivi et de poursuite, les navires de poursuite, les avions ARIA, les centres de la NASA jusqu'au Goddard Space Flight Center et ensuite jusqu'à Houston.
Le système se compose de plusieurs canaux de communication à acheminement diversifié loués sur des satellites de communication, des systèmes de communications communs (compagnies téléphoniques) et des installations radio haute fréquence lorsque cela est nécessaire pour fournir des liaisons d'accès. Il comprend également des canaux à bande étroite et à bande large, ainsi que certains canaux de télévision. Parmi ces canaux, on trouve une variété de systèmes télégraphiques, vocaux et de données (numériques et analogiques) offrant plusieurs débits de données numériques. Les systèmes à large bande n'offrent pas de couverture outre-mer. Des itinéraires alternatifs ou une redondance permettent d'accroître la fiabilité.
Un centre de commutation principal et des points de commutation et de contrôle intermédiaires permettent une gestion centralisée, un contrôle technique et des opérations de commutation sous contrôle direct de la NASA. Le centre de commutation principal se trouve au Goddard Space Flight Center, à Greenbelt, dans le Maryland. Les centres secondaires sont situés à Canberra, Madrid, Londres, Honolulu, Guam et au centre spatial Kennedy.
Ce dernier est directement relié au centre de contrôle de mission, à Houston, via le système de données de lancement Apollo et au centre de vol spatial Marshall, à Huntsville, en Alabama, par une installation d'échange d'informations sur le lancement. Après le lancement, toutes les données de suivi et de télémétrie du réseau sont centralisées au GSFC pour être transmises au MCC de Houston via deux circuits de 50 000 bits par seconde utilisés pour la redondance et en cas de débordement des données.
Deux satellites de communication Intelsat sont utilisés pour Apollo XI. Celui positionné au dessus de l'océan Atlantique dessert la station "bande-S Unifiée" (USB) de l'Île d'Ascension, le navire USNS Vanguard et le site des Canaries. L'autre, au dessus du Pacifique dessert le site USB de Carnarvon (Australie) et les navires de l'océan Pacifique. Toutes ces stations seront capables de transmettre simultanément par le satellite à Houston via Brewster Flat, état de Washington et le Centre de vol Spatial Goddard à Greenbelt dans le Maryland.
 Photo de Intelsat III |
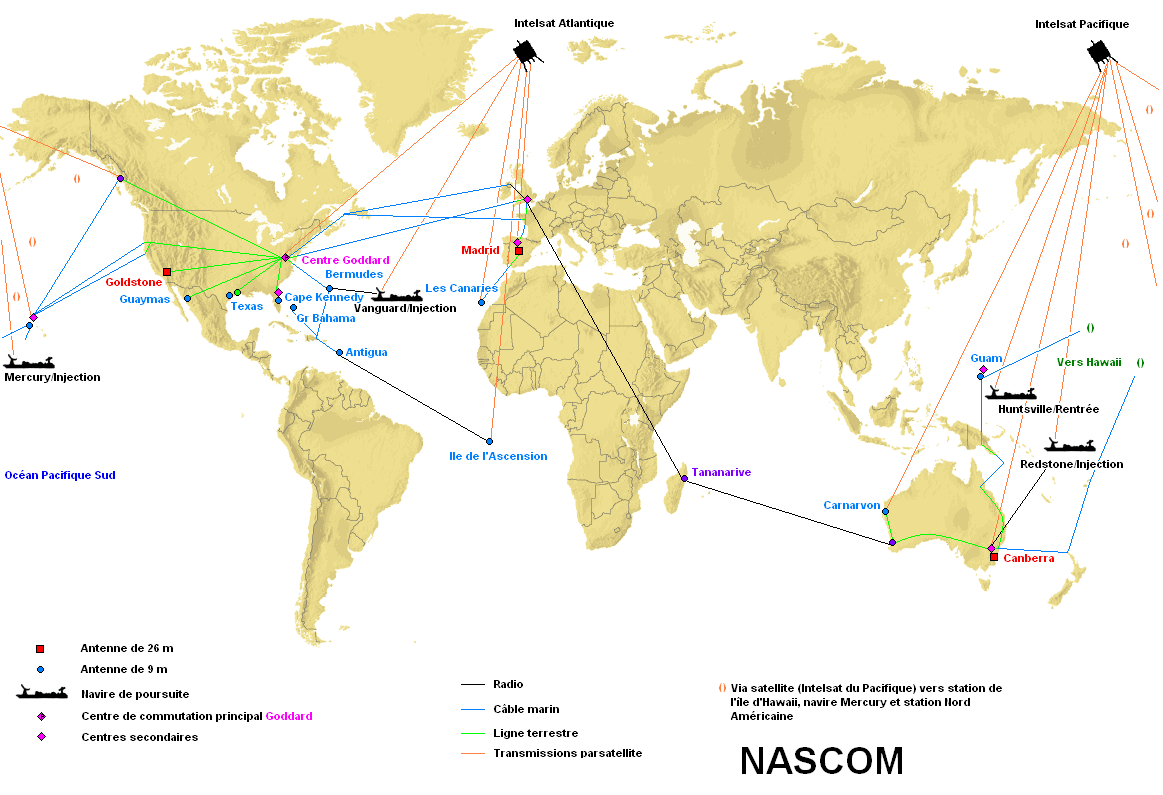 Carte du réseau NASCOM |
 La station "USB" de l'île de l'Ascension |
Cartes d'aprés les originales de la NASA.
Le réseau informatique
En une fraction de seconde, les systèmes de traitement numérique du réseau, avec le centre des vols spatiaux habités de la Nasa comme noeud central, se "parlent" entre eux ou au vaisseau spatial.
Les ordinateurs ultra-rapides des sites distants (navires de suivi inclus) émettent des commandes ou transfèrent des données telles que le contrôle de la pression cabine, des commandes d'orientation en orbite, ou des indications "go / no-go" pour certaines opérations.
Quand l'information provient de Houston, les ordinateurs se référent à leurs informations préprogrammées pour s'assurer de leur validité avant de transmettre les données requises au vaisseau spatial. Ces informations "montantes" (up-link) sont communiquées par ondes radio UHF à la vitesse de 1200 bits par seconde. La communication entre les sites terrestres distants, via des lignes de communication à grande vitesse, se fait au même taux. Houston lit les informations de ces sites à 2400 bits par seconde, tout comme celle des sites distants à 100 mots par minute.
Les systèmes informatiques exécutent beaucoup d'autres fonctions, comme par exemple :
- Garantir la qualité des lignes de transmission en exerçant continuellement les chemins de données.
- Vérification de l'exactitude des messages par des opérations répétitives.
- Mise à jour constante du statut de vol.
Pour les informations "descendantes" (down link), des capteurs intégrés dans le vaisseau spatial échantillonnent continuellement la température de la cabine, la pression, des informations physiques sur les astronautes comme leur rythme cardiaque et leur respiration.
Ces données sont transmises aux stations terrestres à 51,2 kilo-octets (12800 bits) par seconde.
Les ordinateurs du MCC :
- Détectent et sélectionnent des changements ou des déviations, les comparent avec leurs programmes enregistrés, et indiquent les zones problématiques ou les données pertinentes aux contrôleurs de vol.
- Génèrent l'affichage au personnel de mission.
- Rassemblent les données de sortie aux formats appropriés.
- Enregistrent les données sur bande magnétique afin que les contrôleurs de vol puissent les consulter ultérieurement.
- Donnent l'heure de référence.
Textes traduits de l'anglais, sources : "NASA Historical data book: volume III", article de W. Stevenson Bacon pour Popular Science "Fabulous floating control center will guide us to the Moon". Texte de Paul Cultrera, tous droits réservés.