LES DIFFÉRENTS SYSTÈMES DE L'ÉTAGE DE REMONTÉE
![]()
L'étage de remontée est conçu pour :
- fournir un environnement viable contrôlé aux deux astronautes pendant qu'ils sont séparés du CSM.
- fournir la visibilité nécessaire pour l'atterrissage, le séjour et l'ascension lunaire, ainsi que pour le rendez-vous et l'amarrage avec le CM.
- assurer le transfert des astronautes et de l'équipement entre le LM et le CM et entre le LM et la surface lunaire.
- protéger les astronautes et l'équipement contre la pénétration de micrométéorites.
L'ensemble ou une partie des sous-systèmes suivants sont contenus dans l'étage de remontée :
- système de contrôle du guidage et de la navigation (GN & C),
- provisions pour l'équipage, affichage (tableau de bord),
- système du contrôle de l'environnement,
- dispositifs électro-explosifs,
- instrumentation,
- source de puissance électrique,
- propulsion principale (moteur de remontée),
- contrôle d'attitude,
- communications.
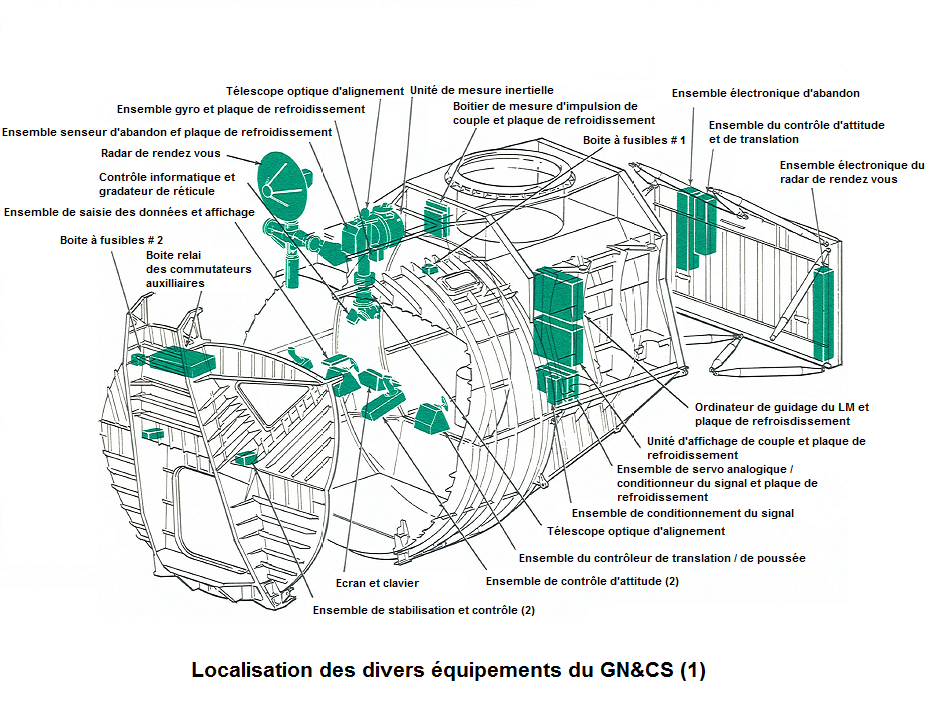
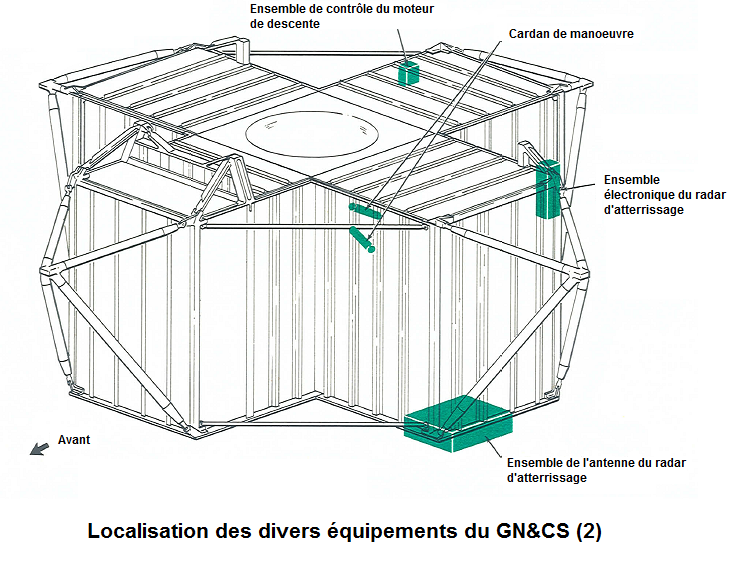
LE SYSTÈME GN&CS
La principale fonction du GN&CS (Guidance Navigation and Control Subsystem pour sous-système de guidage, de navigation et de contrôle) est l'accumulation, l'analyse et le traitement des données afin de garantir que le LM suit à tout moment un plan de vol prédéterminé. Pour remplir ces fonctions, la partie guidage doit connaître la position et la vitesse actuelles par rapport à l'objectif de guidage. Le GN&CS assure la navigation, le guidage et le contrôle du vol pour atteindre l'objectif de guidage spécifique.
 |
 |
LE LM GUIDANCE COMPUTER (LGC)
Petit rappel L'ordinateur et le système de navigation développés pour le programme Apollo sont utilisés à la fois à bord du module de commande (et de service), ou CSM, et à bord du module lunaire, ou LM. Pour les distinguer, l'ordinateur du module de commande est appelé CMC (Command Module Computer), celui du module lunaire est appelé LGC (Lunar-module Guidance Computer). |
Donc, tout comme le CMC, le LGC est le dispositif central de traitement des données du GN&CS. Il s'agit d'un ordinateur de contrôle doté de nombreuses caractéristiques d'un ordinateur à usage général. Il traite les données et émet des signaux de commande discrets pour divers sous-systèmes. En tant qu'ordinateur de contrôle, il aligne l'élément stable de l'IMU et fournit les commandes d'entraînement de l'antenne RR (Rendezvous Radar). Le LGC fournit également des commandes combinées aux LR (Landing Radar) et au RR, aux moteurs d'ascension et de descente, aux propulseurs RCS et aux affichages de la cabine. En tant qu'ordinateur à usage général, il résout les problèmes de guidage nécessaires à la mission. Par ailleurs, le LGC surveille le fonctionnement du PGNS.
Le LGC contient un minuteur, un générateur de séquence, un processeur central, un contrôle des priorités, une section d'entrée-sortie et une mémoire. Les principales fonctions du LGC sont mises en œuvre par l'exécution de programmes stockés dans la mémoire. Les programmes sont écrits dans un langage machine appelé instructions de base. Une instruction de base peut être un mot d'instruction ou un mot de données. Tous les mots du LGC ont une longueur de 16 bits.
Le LGC stocke les données relatives (position, vitesse et trajectoire) aux profils de vol en (re)montée et en descente que le véhicule doit adopter pour mener à bien sa mission. Il les utilise pour résoudre les équations de vol. Les résultats des différentes équations sont utilisés pour déterminer l'amplitude et la direction de la poussée nécessaire. Le LGC détermine les corrections à apporter. Les commandes de guidage et de direction sont transmises aux systèmes de propulsion au moment approprié, et les commandes d’orientation sont contrôlées par le LGC afin d’orienter le véhicule vers une nouvelle trajectoire, si nécessaire. L’IMU détecte les accélérations et transmet ces informations au LGC, qui les intègre pour calculer la variation de vitesse et la vitesse totale. Le LGC envoie des signaux d'entraînement aux CDU et aux gyroscopes de stabilisation de l'IMU afin d'aligner les angles de cardan. Les signaux de position provenant de l'élément stable sont transmis à l'ordinateur pour indiquer les changements d'attitude.
Le LGC fournit des signaux de commande au RR pour le positionnement de l’antenne et reçoit, via les unités de données de couplage (CDU), des informations sur l’angle de l’antenne. Il utilise ces informations dans les calculs de positionnement de l'antenne. Pendant les opérations d'alunissage, les informations relatives à l'observation des étoiles sont chargées manuellement dans le LGC, à l'aide du DSKY. Ces informations sont utilisées pour calculer les commandes d'alignement de l'IMU. L'ordinateur de guidage du LM et sa programmation permettent de répondre aux exigences fonctionnelles de la mission. Les fonctions exécutées au cours des différentes phases de la mission comprennent des opérations automatiques et semi-automatiques qui sont mises en œuvre principalement par l'exécution des programmes stockés dans la mémoire (ROM d'une capacité de 36 864 mots) du LGC. Le LGC contient également une petite zone effaçable (RAM) d'environ 2 048 mots pour stocker temporairement des variables.
En mémoire, les mots de données contiennent un bit de parité, 14 bits d'amplitude et un bit de signe. Un 1 binaire dans le bit de signe indique un nombre négatif ; un 0 binaire, un nombre positif. Les mots d'instruction contiennent un code d'adresse de 12 bits et un code d'ordre de trois bits. Normalement, le code d'adresse représente l'emplacement d'un mot dans la mémoire ou dans le processeur central. Le code d'ordre définit le flux de données au sein du LGC, et le code d'adresse sélectionne les données à utiliser pour les calculs. Le code d'ordre représente une opération à effectuer sur les données dont l'emplacement est représenté par le code d'adresse. Le code d'ordre de chaque instruction est entré dans le générateur de séquence, qui contrôle le flux de données et produit une séquence différente d'impulsions de commande pour chaque instruction. Chaque instruction est suivie d’une autre instruction. Pour spécifier l’ordre dans lequel des instructions consécutives doivent être exécutées, les instructions sont normalement stockées dans des emplacements mémoire successifs. L’adresse de l’instruction suivante est obtenue en ajoutant la quantité un à l’adresse de l’instruction en cours d’exécution. L’exécution d’une instruction est terminée lorsque le code d’ordre de l’instruction suivante est transféré au générateur de séquence et que l’adresse correspondante se trouve dans le processeur central.
Le processeur central effectue des opérations arithmétiques et des manipulations de données sur les informations provenant de la mémoire, des canaux d'entrée et du contrôle des priorités. Les opérations arithmétiques sont effectuées à l'aide du système de numérotation binaire en complément à 1. Le processeur central effectue toutes les opérations sous le contrôle des impulsions générées par le générateur de séquences.
Tous les mots lus à partir de la mémoire sont vérifiés pour la parité correcte, et un bit est généré dans le processeur central pour tous les mots écrits dans la mémoire. Le LGC utilise une parité impaire ; un nombre impair de 1 binaires, y compris le bit de parité, est associé à tous les mots stockés en mémoire. Le processeur central fournit également des données et des signaux de contrôle par l’intermédiaire des canaux de sortie et assure l’interface avec les différents sous-systèmes.
Le LGC fonctionne dans un environnement où de nombreux paramètres et conditions changent en permanence. Le LGC, cependant, fonctionne de manière incrémentielle, en ne traitant qu'un seul paramètre à la fois. Par conséquent, pour que le LGC puisse traiter les paramètres, le matériel du LGC est à temps partagé. Le partage du temps est réalisé en assignant des priorités aux fonctions de traitement du LGC. Ces priorités sont utilisées par le LGC de manière à ce qu'il traite d'abord la fonction de traitement ayant la priorité la plus élevée.
Le partage du temps est mis en œuvre par l'une des des méthodes suivantes :
- interruption de compteur (une fonction matérielle)
- interruption de programme (une fonction matérielle et un programme de contrôle de programme)
- traitement contrôlé par programme (fonction de contrôle du programme).
Chacune des fonctions susmentionnées a une priorité relative les unes par rapport aux autres ; dans chacune d'elles, il y a également un certain nombre de fonctions de traitement, chacune ayant un niveau de priorité par rapport aux autres fonctions de traitement au sein du groupe. La plupart des traitements effectués par le LGC appartiennent à la catégorie des traitements commandés par programme. Au cours de ce traitement, le LGC est contrôlé par le programme stocké dans sa mémoire.
LE SOFTWARE DU LGC Le logiciel est différent pour les deux ordinateurs, et chaque "édition" a un parcours de développement indépendant, avec des composants partagés. Il a en commun la gestion des différents programmes, ainsi que la gestion de la plate-forme inertielle et celle de l'interface vers l'équipage (appelée DSKY, pour Display and Keyboard). Par exemple, le logiciel du CMC se distingue par la présence du programme de contrôle et de commande du lanceur Saturn V (jamais utilisé dans ses fonctions de contrôle, l'ordinateur de Saturn V ayant toujours fonctionné de manière nominale). Il contient également des fonctions de pilotage pendant la manœuvre de la trajectoire translunaire, pendant le vol orbital et bien sûr pour la rentrée dans l'atmosphère terrestre. Le logiciel du LGC est différent pour les programmes de descente et d'atterrissage, et pour le programme d'ascension et l'insertion ultérieure en orbite lunaire. Une autre partie commune est consacrée aux manœuvres de rendez-vous, car les deux véhicules peuvent jouer un rôle actif dans le processus complexe d'amarrage en orbite. Le logiciel des deux véhicules diffère également dans la gestion des dispositifs de propulsion et des capteurs de navigation : alors que le CSM est équipé d’un sextant et d’un télescope, le LM ne dispose que d’un dispositif optique unique, présentant un comportement particulier, en raison de la taille réduite du LM et de la nécessité de maintenir la masse dans des limites strictes. LUMINARY est le nom du logiciel de mission exécuté sur le LGC, le programme est stocké dans la ROM (mémoire corde) de celui-ci. Pour être implanté au sein du LGC, il est nécessaire, tout comme le logiciel essentiel au CSM (Colossus), "d'assembler" son code source en langage machine binaire à l'aide d'un programme informatique appelé à l'origine YUL (puis remplacé par un programme appelé GAP). Sa fabrication prend des mois (le programme remplit environ 10 cm d'impression). Le logiciel doit donc être dans sa forme définitive plusieurs mois avant le lancement. Le programme LUMINARY se compose de nombreux sous-programmes organisés selon des niveaux de priorité, c'est à dire qu'ils s'exécutent à tour de rôle en fonction de leur priorité. Chaque programme déplace des données dans et hors de la très petite zone de mémoire effaçable. Le principal défi de débogage consiste à empêcher les programmes d'effacer ou de "superposer" les données d'un autre programme à des moments inappropriés. Si trop de tâches demandent du temps de calcul, l’ordinateur retarde ou abandonne l’exécution des tâches de plus basse priorité, émet une alarme et commence à traiter la nouvelle tâche. |
LE DSKY
Il y a quelques différences d'affichage sur le côté gauche du DSKY par rapport aux deux équipant le CM.
Les quatre voyants additionnels sont :
ALT et VEL : Ces voyants s'allument lorsque le radar d'atterrissage du LM ne parvient pas à verrouiller la surface lunaire et à déterminer l'altitude et la vitesse du LM. Lorsque le LM entame sa descente, ces voyants sont toujours allumés car le LM est trop haut pour obtenir un bon retour radar de la surface. Au fur et à mesure que l'altitude du LM diminue, il finit par obtenir un retour suffisamment bon pour déterminer son altitude et sa vitesse, et ces lumières s'éteignent. Les règles de la mission stipulent que si le LM descend à 3048 m (10 000 ft) d'altitude et que ces lumières sont toujours allumées, l'atterrissage doit être interrompu.
NO DAP : Ce voyant s'allume lorsque le pilote automatique numérique (DAP) du LM est éteint ou inactif.
PRIO DISP : Ce point nécessite quelques explications. L'affichage de l'AGC étant très limité, l'AGC ne peut pas afficher des données en même temps que l'équipage entre des données sur le clavier. Si l'équipage est en train d'entrer des données sur le clavier et que l'AGC a besoin d'afficher une donnée urgente à l'équipage (comme une alarme de programme), l'AGC allume le PRIO DISP (affichage prioritaire) pour faire savoir à l'équipage qu'il a quelque chose d'urgent à lui montrer. Le plus souvent, l'équipage annule ce qu'il était en train de faire pour que l'AGC puisse afficher les données urgentes.
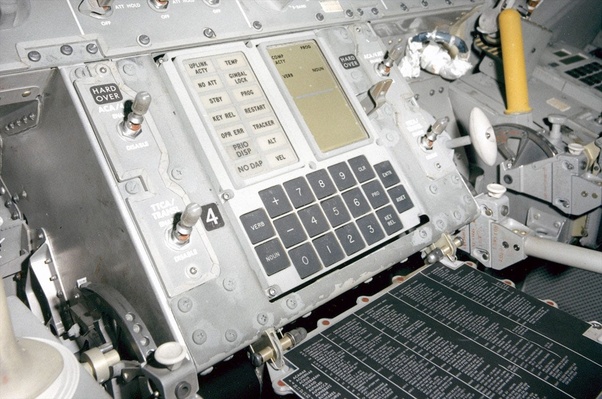
Notez que sur les premiers modèles des DSKY équipant le LM, les voyants NO DAP et PRIO DISP sont présents, mais n'ont pas d'étiquette. Sur ces DSKY, on a l'impression qu'il n'y a que 12 voyants, mais les 14 voyants sont en fait fonctionnels.

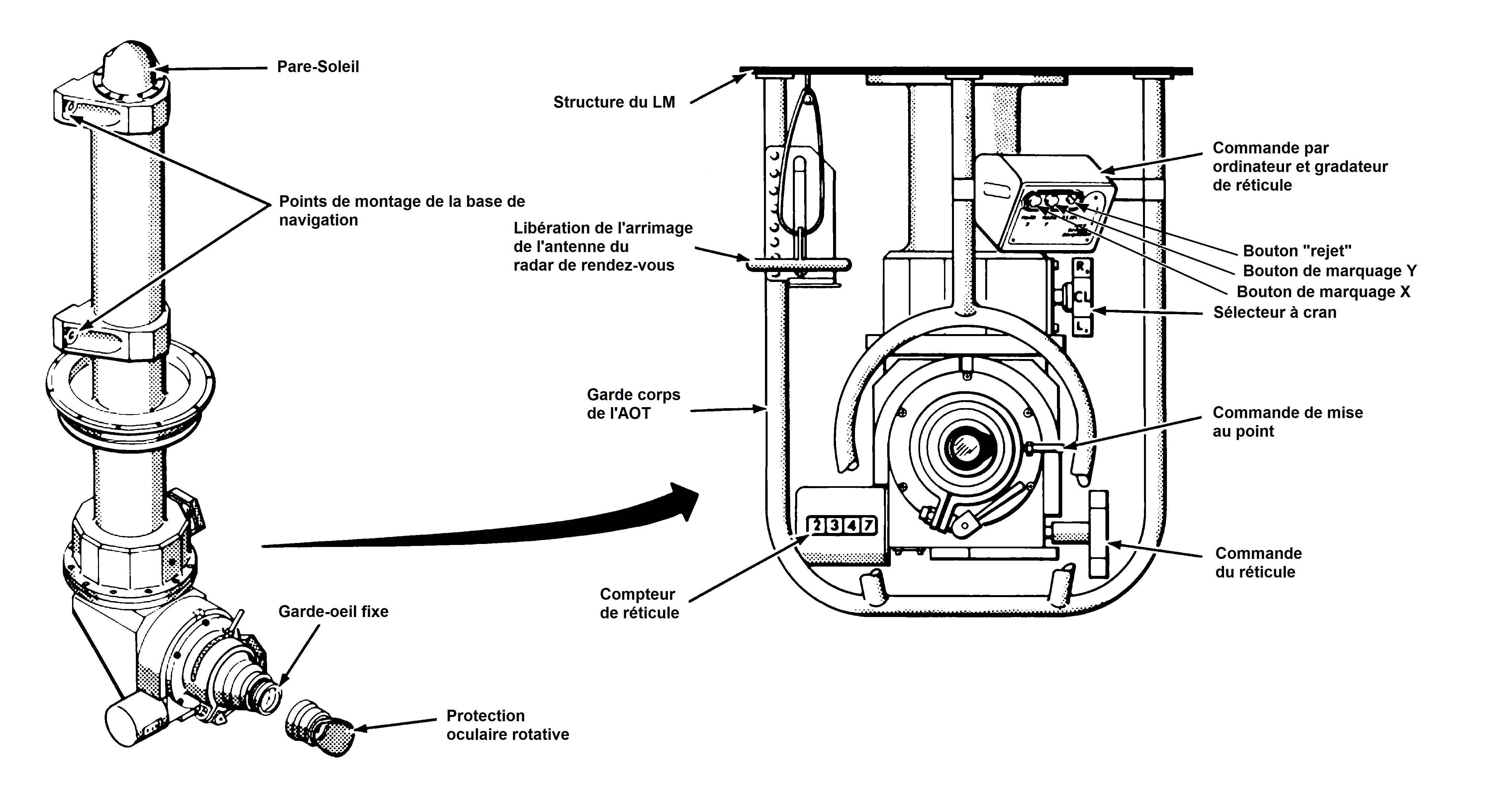
L'AOT
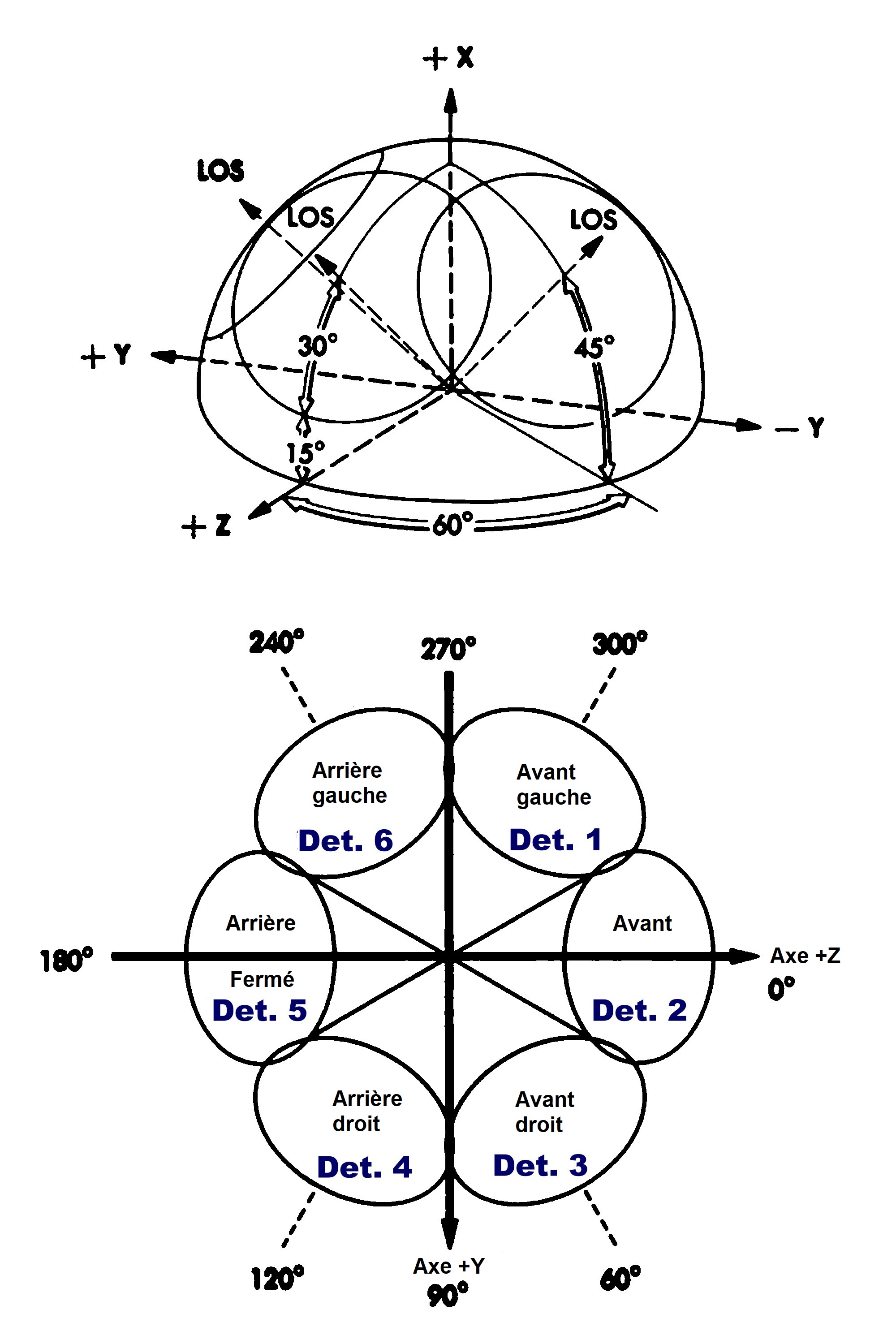
Le télescope optique d'alignement (Alignment Optical Telescope ou AOT), monté sur la base de navigation, est utilisé pour effectuer des mesures de visée stellaire dans le but de calibrer le système de guidage inertiel du LM par rapport à sa véritable orientation dans l'espace. Il s’agit essentiellement d’un dispositif de type périscope à puissance unitaire, avec un champ de vision conique de 60°. Il est actionné manuellement par les astronautes. Le télescope possède un axe d'arbre mobile, parallèle à l'axe X du LM, et une ligne de visée inclinée d'environ 45° par rapport à l’axe X, dans le plan Y -Z. Il mesure environ 91 cm (36 in) de long et se compose d'une section supérieure et d'un oculaire. Les composants structurels, tels que le boîtier et les supports, sont usinés en béryllium ; les entretoises et autres pièces similaires sont en aluminium. Un joint de pression est utilisé pour isoler la cabine de l'environnement spatial. Le boîtier intérieur, qui fait partie de la section supérieure et tourne dans un boîtier extérieur, contient les composants de la section optique de l'arbre. Les lentilles d'objectif et de relais ainsi qu'un prisme, sont alignés sur l’axe et situés axialement dans le boîtier intérieur.
 |
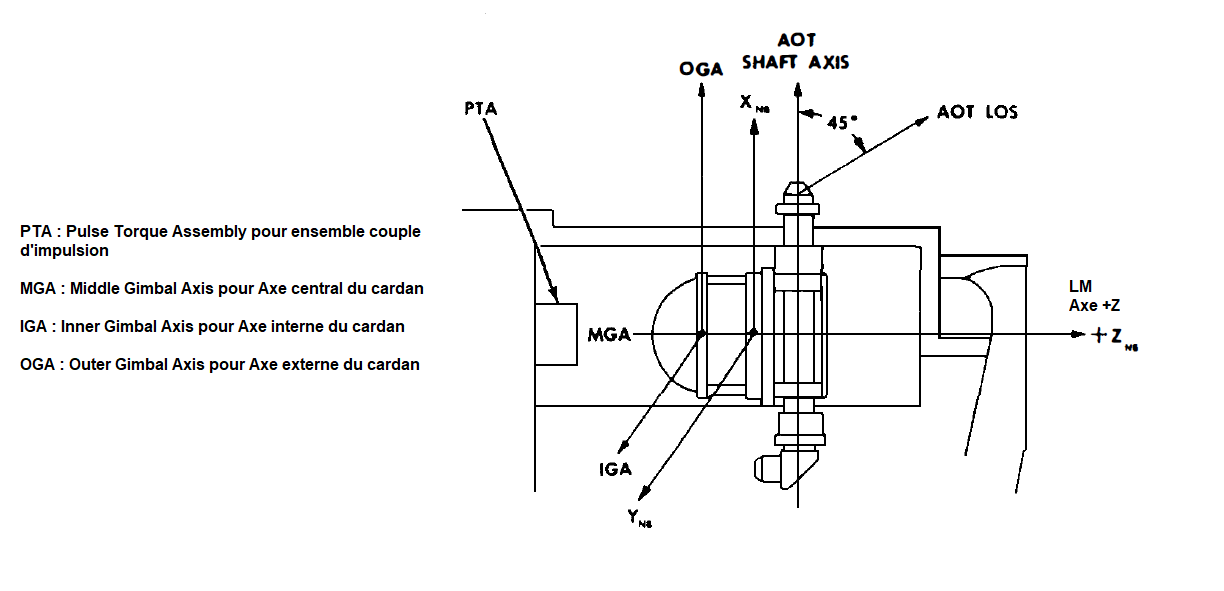 |
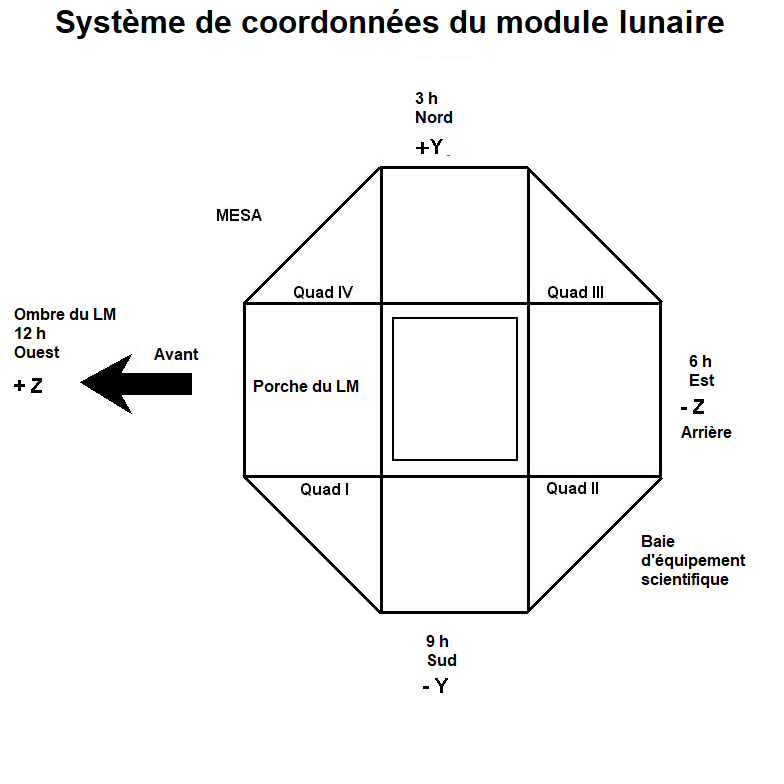
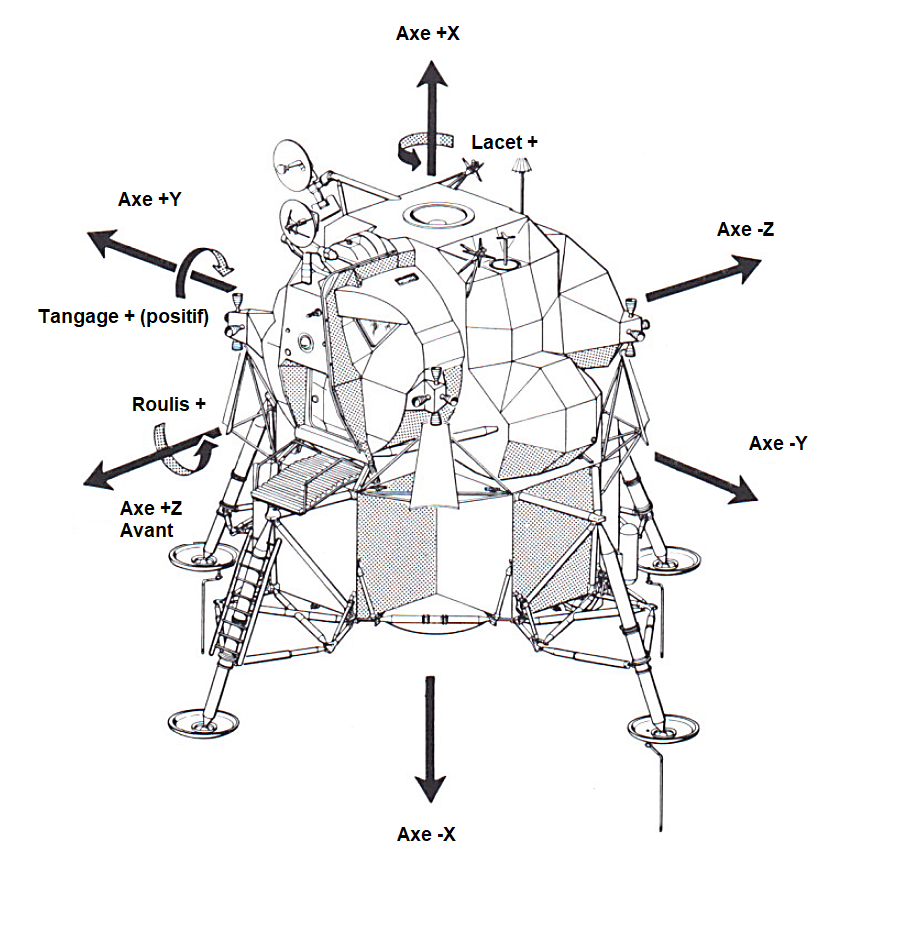
Bon à savoir : lorsqu’on parle du LM, l’axe X est l’axe de poussée et correspond approximativement à la direction verticale lorsque le LM est posé sur la surface lunaire. L’axe +Z est dirigé vers l’avant, en direction de l’écoutille EVA, qui se trouve approximativement à l’ouest lorsque le vaisseau spatial est posé sur la surface après un atterrissage depuis l’est. L’axe +Y pointe vers le côté droit du vaisseau spatial, qui se trouve approximativement au nord. Par conséquent, le plan X-Z est approximativement un plan vertical est-ouest ; le plan Y-Z est approximativement un plan vertical nord-sud ; et le plan X-Y est approximativement un plan horizontal.
 |
 |
La ligne de visée du télescope est fixe en élévation et mobile en azimut sur six positions. Celles-ci sont sélectionnées en tournant un bouton de sélection à crans situé sur le télescope ; elles sont espacées d'intervalles de 60°. La position avant (F), cran zéro, place la ligne de visée dans le plan X-Z, en regardant vers l'avant et vers le haut, comme on le ferait depuis l'intérieur du LM. La position droite (right/R) place la ligne de visée à 60° à droite du plan X-Z ; la position gauche (left/L), à 60° à gauche du plan X-Z. Chacune de ces positions maintient la ligne de visée dans le plan X-Z. Chacune de ces positions maintient la ligne de visée à 45° de l'axe LM+X.
Les trois autres positions correspondent à une inversion du prisme situé sur la partie supérieure du télescope. Ces positions sont : arrière-droite, fermée (closed/CL) et arrière-gauche. La position CL (180° par rapport à la position F) est la position replié. Les positions arrière droite et arrière gauche sont peu utilisées.
L'optique se compose de deux sections : l'optique de l'arbre et l'optique de l'oculaire. La section optique de l'arbre est un ensemble de puissance -5 qui offre un champ de vision de 60°. La section optique de l'oculaire est un ensemble de puissance +5 qui permet de mesurer les angles de l'arbre et du tourillon. Le réticule de l'optique de l'oculaire se compose d'un réticule et d'une paire de spirales d'Archimède. Le réticule vertical, une ligne d'orientation désignée ligne Y (l'ordonnée), est parallèle à l'axe X du LM lorsque le réticule est en position de référence 0°. Le réticule horizontal, une ligne auxiliaire appelée ligne X (l'abscisse), est perpendiculaire à la ligne d'orientation. Les spirales à un tour sont superposées du centre du champ de vision au sommet du réticule vertical.
Dix lampes rouges miniatures, montées autour du réticule, empêchent les fausses indications d’étoiles causées par les imperfections du réticule et assurent l’éclairage de son motif. Les étoiles apparaissent en blanc, les imperfections du réticule en rouge. Des éléments chauffants empêchent la formation de buée sur les surfaces optiques en raison de l’humidité et des basses températures rencontrées pendant la mission.
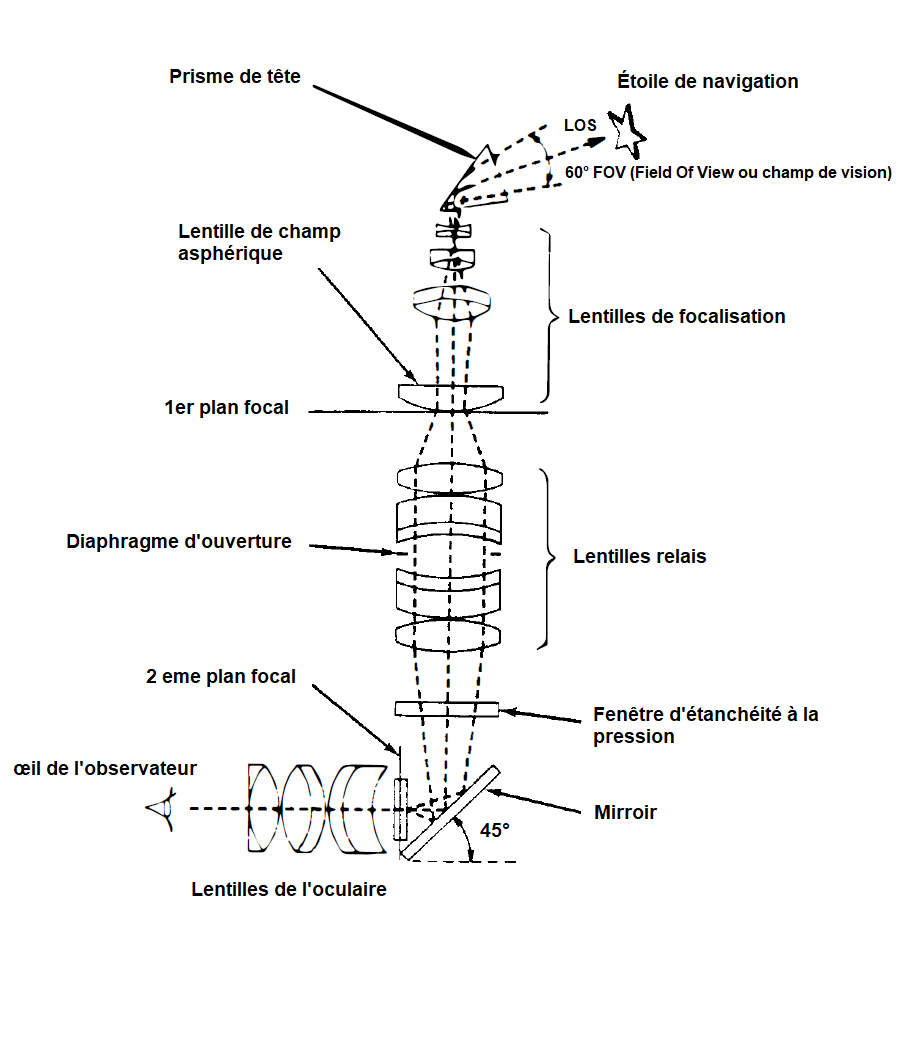
Une commande de réticule permet la rotation manuelle du réticule pour les alignements sur la surface lunaire. Un compteur, situé sur le côté gauche de l'appareil, fournit une lecture angulaire de la rotation du réticule. Le compteur se lit en degrés à ±0,02° (±72 secondes) près. La lecture maximale est de 359,88°, puis le compteur revient à 0°. L'interpolation est possible à ±0,01° près. Une protection oculaire rotative est fixée à l'extrémité de la section de l'oculaire. Elle est réglable axialement pour la position de la tête. Cette protection est utilisée lorsque l'astronaute effectue des observations avec son plastron ouvert. Ce protège-œil est retiré lorsque l'astronaute effectue des observations avec son plastron fermé ; un protège-œil fixe, collé de façon permanente au télescope, est utilisé à la place. Le protège-œil fixe empêche la plaque frontale d'être endommagée par l'oculaire. Une lentille filtrante à haute densité, fournie comme équipement auxiliaire, permet d'éviter d'endommager les yeux de l'astronaute en cas d'observation directe accidentelle du Soleil ou si l'astronaute choisit d'utiliser le Soleil comme référence.
L'AOT est utilisé pour les observations en vol et sur la surface lunaire. Pour les observations en vol, le télescope peut être placé dans n'importe laquelle des positions utilisables. Cependant, lorsque le LM est ammarré au CSM, seule la position avant est utilisée. L'astronaute sélectionne un cran et l'étoile particulière qu'il souhaite utiliser. Il manœuvre ensuite le LM de manière à ce que l'étoile sélectionnée se trouve dans le champ de vision du télescope. La position spécifique du cran et un code associé à l'étoile sélectionnée sont entrés dans l'ordinateur de guidage par l'astronaute à l'aide du DSKY. Le LM est ensuite manœuvré de manière à ce que l'image de l'étoile croise le réticule. Lorsque l'image de l'étoile coïncide avec la ligne Y, l'astronaute appuie sur le bouton-poussoir de marquage Y ; lorsqu'elle coïncide avec la ligne X, il appuie sur le bouton-poussoir de marquage X. L'astronaute peut procéder de cette manière dans les deux sens. L'astronaute peut procéder dans n'importe quel ordre et, s'il le souhaite, il peut effacer la dernière marque en appuyant sur le bouton de rejet. Lorsqu'il appuie sur un bouton-poussoir de marquage, un message discret est envoyé à l'ordinateur de guidage. L'ordinateur de guidage enregistre alors l'heure de la marque et les angles de cardan de la centrale de mesure inertielle au moment du repère.
Computer Control and Reticle Dimmer Assembly (Commande par ordinateur et gradateur de réticule) Le CCRD (Computer Control and Reticle Dimmer Assembly) est monté sur la protection de l’AOT. Une molette sur ce boîtier de commande permet aux astronautes de régler la luminosité de la lampe du réticule de l’AOT lors de l’observation des étoiles. Les boutons-poussoirs MARK X et MARK Y, qui se trouvent également sur ce boîtier, sont utilisés par les astronautes pour envoyer des signaux discrets au LGC lors de l’observation d’étoiles pour un alignement en vol de l’IMU. Le bouton-poussoir REJECT est utilisé si une marque discrète invalide a été envoyée au LGC. L’ensemble achemine l’alimentation du chauffage vers l’AOT et alimente la lampe du réticule. Le circuit de gradation du réticule est constitué d’un potentiomètre commandé par une molette, de deux diodes, d’un transistor de commande et d’un transformateur. |
Le croisement d’une ligne de réticule par l’image de l’étoile définit un plan contenant l’étoile. Le croisement de l’autre ligne du réticule définit un autre plan contenant la même étoile. L’intersection de ces plans forme une ligne qui définit la direction de l’étoile. Pour définir l’orientation inertielle de l’élément stable, des visées sur au moins deux étoiles sont nécessaires. Chaque observation d’étoile nécessite la même procédure. Plusieurs croisements de réticules et leurs marques correspondantes peuvent être effectués sur l’une ou les deux étoiles afin d’améliorer la précision des observations. À l’issue des deuxièmes visées d’étoiles, le calculateur de guidage calcule l’orientation de l’élément stable par rapport à un système de coordonnées de référence prédéfini.
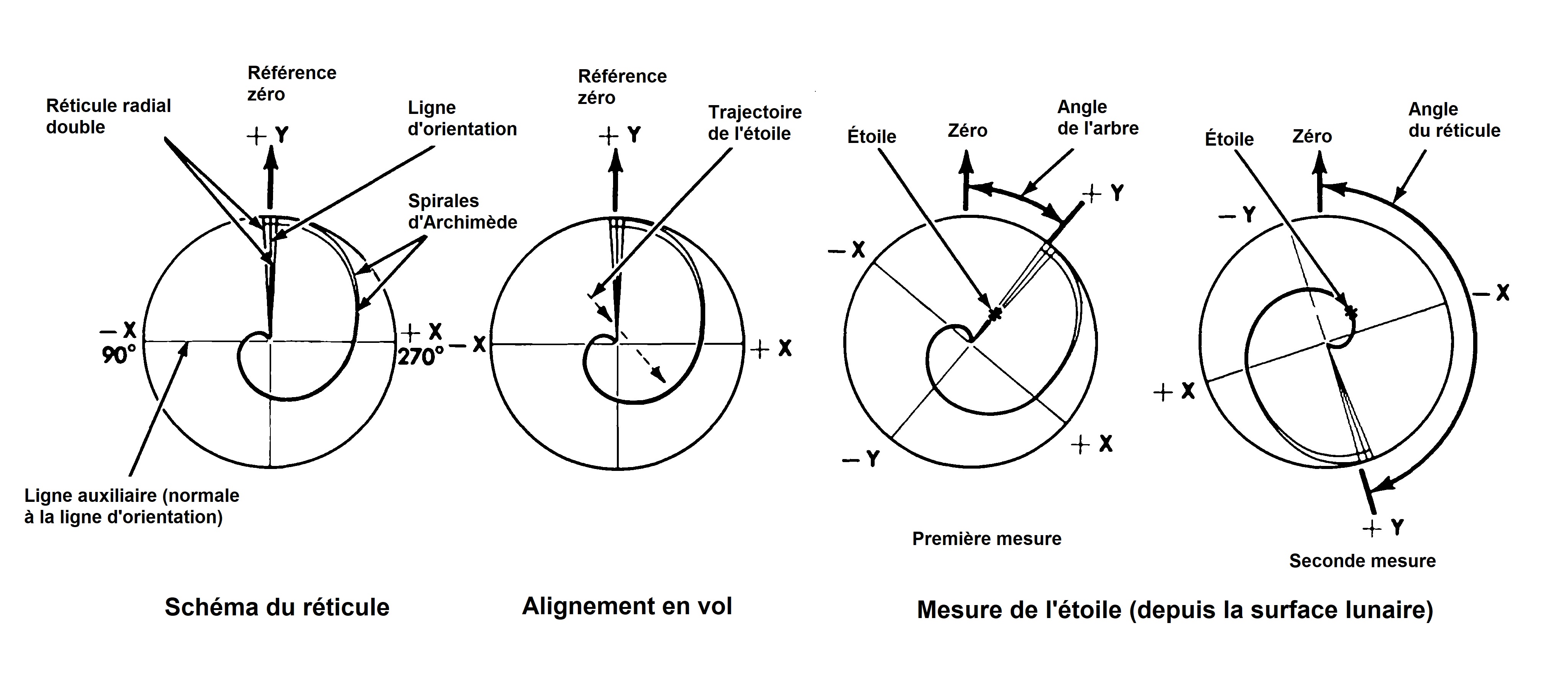
Sur la surface lunaire, le LM ne peut pas être manœuvré pour obtenir une image d’étoile qui croise le réticule. L’astronaute, à l’aide du bouton de commande du réticule, ajuste le réticule pour superposer la ligne d’orientation (Y) sur l’étoile cible. L’affichage de l’angle du réticule sur le compteur du réticule est ensuite introduit dans l’ordinateur par l’astronaute ; celui-ci fournit à l’ordinateur l’angle d’orientation de l’étoile (angle d’axe). L’astronaute continue ensuite à faire tourner le réticule jusqu’à ce qu’un point des spirales soit superposé à l’étoile cible. Cette deuxième lecture angulaire (angle du réticule) est alors entrée dans l’ordinateur avec la position du cran et le code de l’étoile observée. L'ordinateur peut alors calculer le déplacement angulaire de l'étoile par rapport au centre du champ de vision en calculant la différence entre les deux lectures du réticule. En raison des caractéristiques des spirales du réticule, l'angle delta est proportionnel à la distance de l'étoile par rapport au centre du champ de vision. En utilisant cet angle et une équation de proportionnalité, l'ordinateur peut calculer l'angle du tourillon. Au moins deux observations d'étoiles sont nécessaires pour déterminer l'orientation inertielle de l'élément stable.
L'AGS
Le système de navigation de sauvegarde
Le système de guidage d’abandon (Abort Guidance System, ou AGS) du LM représente la première utilisation opérationnelle d’un système inertiel à composants liés. Il est conçu et développé spécifiquement pour être utilisé dans le LM d’Apollo. L’AGS constitue la partie numérique d’un système de guidage et de contrôle hybride numérique/analogique et est configuré pour assurer le contrôle automatique d’un abandon de mission résultant d’un dysfonctionnement du système de guidage primaire (PGS). C’est un système de navigation et de pilotage de sauvegarde (backup) destiné à remplacer le système principal en cas de défaillance de celui-ci durant les phases de descente ou de remontée. Il faut savoir que l’activation de l’AGS entraîne automatiquement l’interruption de la mission, le largage de l’étage de descente si le LM est en cours d’atterrissage, et la traque du CSM en vue d’un amarrage d’urgence.
L’AGS doit son existence à la politique d’abandon de la NASA ; une interruption est ordonnée si une défaillance supplémentaire du système risque d’entraîner la perte de l’équipage. Dans sa conception d’origine, l’AGS n’était pas un ordinateur. C’était un séquenceur disposant seulement de 2 000 mots de mémoire fixe et qui ne possédait pas de fonctions de navigation. Sa tâche consistait simplement à lancer le LM sur une orbite « dégagée » (plus haute que n’importe quelle montagne lunaire), à partir de laquelle celui-ci attendrait le secours du CSM.
De manière plus anecdotique, l’AGS était à l’origine appelé « système de guidage de sauvegarde », ce qui donne en anglais Backup Guidance System ; toutefois, son acronyme (BUGS) n’a apparemment pas été jugé approprié.
Petit historique rapide Concepts préliminaires d'abandon du LM L'AGS a été conçu pour permettre à l'équipage d'abandonner en toute sécurité les phases de descente motorisée, de séjour sur la surface lunaire et d'ascension propulsée de la mission lunaire. Au cours de ces phases critiques, aucun soutien en temps réel provenant du CSM ou du contrôle mission n’est supposé pour assurer la sécurité de l’équipage après une défaillance du PGNCS. Les règles de base qui ont défini les concepts préliminaires du matériel AGS sont les suivantes. 1) La sécurité de l’équipage est primordiale. Cette règle de base implique que la mission sera interrompue si une défaillance supplémentaire entraîne la perte de membres d’équipage. Sur un véhicule équipé d’un PGS et d’un AGS, la défaillance de l’un ou l’autre entraînera l’abandon de la mission, car une défaillance supplémentaire du guidage ne permettra pas un rendez-vous sûr avec le CSM. Une modification des règles de base précédentes a été envisagée pour permettre l'utilisation d'un système de référence d'attitude plus simple, tel qu'une paire de gyroscopes à deux degrés de liberté. L’obligation pour le LM d’achever le rendez-vous avec le carburant embarqué aurait été modifiée afin que le LM s’établisse sur une périlune dégagée dans le plan de l’orbite du CSM. L’obligation pour le LM d’interrompre sa course vers une orbite dégagée aurait été modifiée pour placer le LM sur une trajectoire d’interception avec le CSM. Ces modifications des règles de base ont été examinées et rejetées, principalement en raison de l’augmentation de la consommation de carburant avec un système imprécis, de la charge accrue imposée au CSM et des trajectoires dangereuses impliquées. Choix préliminaire de la mécanisation La règle de base exigeant l’abandon du LM sur une orbite à périlune dégagée et nécessitant du carburant à bord pour compléter le rendez-vous rendait nécessaire un système de référence d’attitude de qualité inertielle. Une plate-forme inertielle à quatre cardans et une référence d’attitude à composants liés ont été envisagées. C’est le second choix qui a été retenu. Les risques de développement associés à un système inertiel à composants liés ont été compensés par la simplicité mécanique, la robustesse inhérente, la facilité de maintenance et le potentiel de ce système en tant que solution légère et fiable pour la mission d’abandon du LM et pour de futures applications spatiales. Au moment de l’évaluation, la masse des capteurs liés (gyroscopes et accéléromètres) était estimée à 7 kg (15 lb) ; l’électronique associée était estimée à 10,9 kg (24 lb). Un programmateur en boucle ouverte a été choisi pour assurer la direction de l’ascension nécessaire à une orbite lunaire dégagée. Un séquenceur d’une masse estimée à 9 kg (20 lb) était le dispositif éprouvé le moins complexe pour accomplir cette fonction, car la navigation AGS n’était pas requise à ce stade du concept. Le programmateur fournissait une séquence de tangage du véhicule basée sur l’heure de l’abandon et sur des constantes stockées, et produisait un signal de coupure de poussée basé sur la sortie de vitesse d’un accéléromètre monté le long de l’axe de poussée du véhicule. Un système de compensation a été intégré au programmateur pour corriger les tolérances inhérentes à la propulsion du véhicule. Le schéma de compensation comparait les lectures de vitesse de l’accéléromètre de l’axe de poussée, prises à des intervalles de temps spécifiés, avec les valeurs de vitesse nominale afin d’ajuster l’attitude de tangage et la vitesse à la coupure. Deux accéléromètres montés perpendiculairement à l’axe de poussée fournissaient une polarisation d’attitude destinée à corriger le mauvais alignement de la poussée du véhicule. Les sorties du système consistaient en des signaux d’erreur d’attitude pour le contrôle de l’attitude du véhicule, des signaux d’attitude totale pour l’affichage et un signal d’arrêt du moteur. Le programmateur était envisagé comme un dispositif disposant de 2 048 mots de mémoire fixe. Un panneau de commande pesant environ 4,5 kg (10 lb) complétait le concept préliminaire de mécanisation. |
À l'automne 1964, une série de réunions de redéfinition du programme du LM se sont tenues toutes les deux semaines afin de reconfigurer ses systèmes de guidage et de contrôle, y compris l'AGS. Plusieurs changements ont été apportés aux règles de base couvrant le design conceptuel existant. Il devient nécessaire de pouvoir "contacter" le CSM de manière plus sûre et automatique sans assistance extérieure. En conséquence, le fabricant TRW décide d’installer un ordinateur d'un peu plus de 4 000 mots de mémoire fixe.
1) L'AGS doit être capable d'effectuer un rendez-vous avec le CM dans les limites de carburant du LM, sans informations provenant de sources extérieures au LM. Mécanisation La révision des règles de base entraine l'abandon du concept de programmateur en boucle ouverte en raison de sa rigidité et de son inaptitude. Un ordinateur polyvalent contenant 4096 mots est choisi pour le remplacer. La capacité de navigation est ajoutée au logiciel et une loi de guidage explicite est sélectionnée pour effectuer le rendez-vous. Une interface directe entre le radar de rendez-vous et l'ordinateur est ajoutée pour les mises à jour de navigation, mais celle-ci est ensuite remplacée par une interface manuelle en raison de limitations mécaniques. Une connexion est ajoutée entre la liaison descendante de télémétrie numérique du PGS et l'ordinateur AGS pour obtenir les informations d'initialisation du vecteur d'état pour la navigation ; cet ajout étend l'interface d'alignement existante pour l'alignement de référence d'attitude avec le PGS. Une liaison descendante de télémétrie numérique est également ajoutée à partir de l'AEA. Aux affichages d'attitude totale et d'erreur d'attitude existants s'ajoutent des interfaces pour afficher l'altitude, le taux d'altitude et la vitesse latérale afin de surveiller le PGS. |
L'AGS devient donc un système de guidage complet. Après l'alignement du PGS avec les informations d'attitude et après l'initialisation avec les données de position, de vitesse et de temps d'époque du LM et du CSM, l'AGS calcule en continu l'attitude du LM, la position et la vitesse du LM et du CSM, et les trajectoires d'abandon pour des conditions d'insertion orbitale prédéterminées ou pour des transferts orbitaux vers le CSM.
Bon à savoir : l'AGS est un système complètement distinct de l'AGC, avec une architecture différente, un jeu d'instructions différent et un logiciel d'exécution différent. Il fonctionne en totale indépendance et en parallèle du PGS du LM.
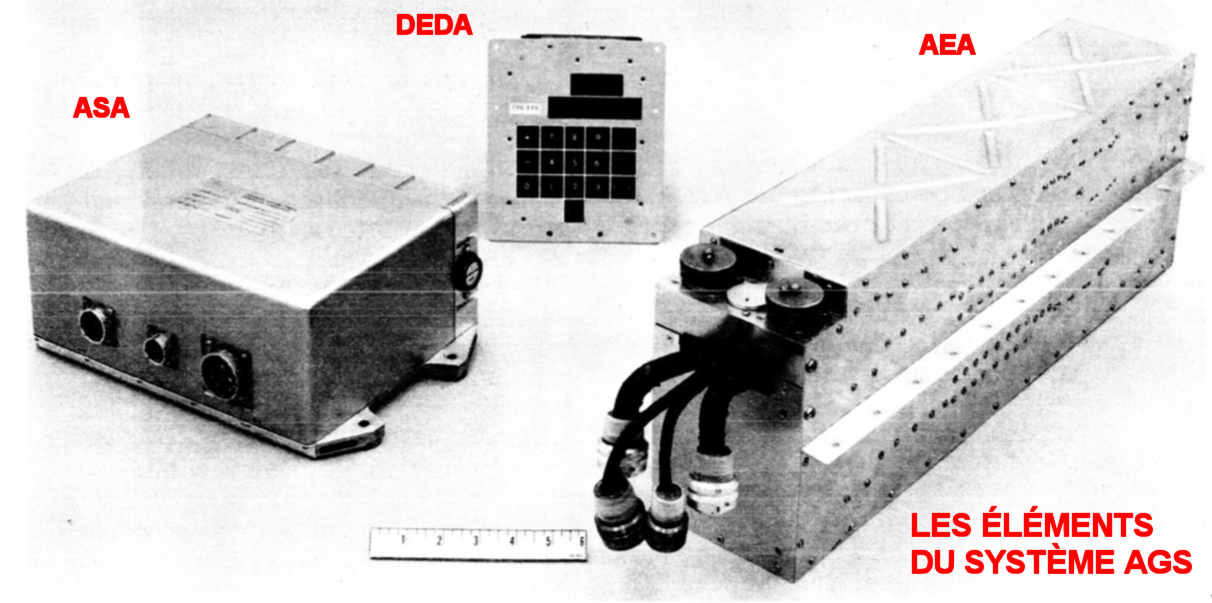
L'AGS se compose de trois sous systèmes :
- son propre ordinateur AEA (Abort Electronics Assembly),
- un simple système inertiel, ASA (Abort Sensor Assembly),
- sa propre console d'affichage et de saisie DEDA (Data Entry and Display Assembly), plus rudimentaire que le DSKY.
L'AEA
L'ordinateur de l'AGS est probablement le système de calcul le moins connu de tout le programme Apollo. Le Abort Electronics Assembly (AEA) a été conçu et développé par TRW, et non par le MIT Instrumentation Laboratory qui a développé l’AGC. Il n’y a donc pas eu de chevauchement de personnel entre les deux équipes. De plus, les techniques d’ingénierie utilisées étaient pratiquement indépendantes, à l’exception de la contrainte commune d’utiliser la technologie disponible à l’époque, notamment la mémoire à noyaux de ferrite.
L'ordinateur construit pour le système AGS est le MARCO 4418 (MARCO stands for Man Rated Computer, ordinateur qualifié pour le vol habité). Il est situé dans le compartiment arrière du LM. Ordinateur numérique polyvalent, il comprend une mémoire centrale, une logique de commande et arithmétique, des circuits d’entrée/sortie, et une alimentation électrique. Ses dimensions sont 12,7 × 20,3 × 60,33 cm, sa masse est de 14,8 kg, et sa consommation électrique maximale est de 90 W.
L’AEA traite les informations provenant de l’ASA, du DEDA et du PGS, il effectue l’alignement de la référence d’attitude, l’initialisation du vecteur d’état, le calibrage des biais des accéléromètres en vol et sur la surface lunaire, les autotests, le maintien de la référence d’attitude, les calculs de navigation, la sélection des modes, les calculs de guidage, l’émission des commandes de direction et moteur, le traitement de la télémétrie, et fournit des sorties pour la surveillance en vol.
Sa mémoire contient 4096 mots : les 2048 mots supérieurs constituent la mémoire fixe (ROM) et les 2048 mots inférieurs la mémoire effaçable (RAM). La mémoire fixe et la mémoire effaçable sont construites de manière similaireafin de permettre un rapport variable entre les deux, facilitant une adaptabilité à de futures applications. Cinquante-trois points d’échappement existent dans la mémoire fixe afin de permettre des corrections si nécessaire.
La mémoire utilise des noyaux de ferrite de 0,76 mm (30 mil) câblés en matrice de 64 par 64, un plan par bit. Les mots ont une longueur de 18 bits, composés d’un bit de signe et de 17 bits de magnitude. Les instructions sont codées sur 18 bits et comprennent un code d’ordre et une adresse d’opérande unique. La mémoire effaçable est une mémoire centrale parallèle à courant coïncident, à accès aléatoire, dont le temps de cycle est de 5 µs (microseconde). Les fonctions nécessitant les calculs les plus rapides ou indépendantes de la mission, telles que les routines de cosinus directeurs et de tangente, sont placées en mémoire fixe ; les fonctions dépendantes de la mission, telles que les équations de guidage et le filtre radar, sont placées en mémoire effaçable.
Le cycle de calcul principal dure 2 secondes. Il est divisé en 100 segments de 20 ms, utilisés pour les calculs devant être recalculés toutes les 20 ms, tels que le traitement des signaux de l’IMU, la mise à jour des données de liaison descendante du PGNCS et la mise à jour des cosinus directeurs. D’autres calculs sont effectués toutes les 40 ms, notamment les commandes moteur, l’échantillonnage des signaux externes et le contrôle d’attitude.
Les calculs effectués toutes les 2 secondes sont répartis sur le temps inutilisé des segments de 20 ms, par exemple le traitement des données radar, le calcul des paramètres orbitaux, la séquence de rendez-vous et l’étalonnage des capteurs inertiels. La section arithmétique est parallèle, en complément à deux fractionnaires. Le temps d’addition est de 10 µs et le temps de multiplication de 70 µs.
- La section de calcul de stabilisation et d’alignement assure la stabilisation et l’alignement en fonction des signaux de mode générés par le DEDA (maintien de l’attitude, orientation de guidage, orientation de l’axe Z, alignement PGS-to-AGS, alignement lunaire, étalonnage des gyroscopes et des accéléromètres, et alignement de l’axe du corps). Ces signaux déterminent le fonctionnement de cette section conjointement avec les sections de calcul de navigation et de guidage. Les signaux d’erreur d’attitude référencés au corps et les signaux sinus et cosinus d’attitude totale sont utilisés pour le contrôle du FDAI. Les données de cosinus de direction sont acheminées vers la section de calcul de navigation, où elles sont utilisées pour calculer les données de vitesse latérale et d'accélération inertielle.
- la section de calcul de navigation utilise les entrées des accéléromètres fournies par l'ASA, via les circuits logiques d'entrée de l'AEA, pour calculer la position et la vitesse du LM dans le référentiel inertiel. Elle fournit aux circuits logiques de sortie des données de vitesse totale, d'altitude et de taux d'altitude, ainsi que des données de vitesse latérale dans le référentiel du LM. Ces données sont transmises au DEDA, les données de vitesse d'altitude sont acheminées vers l'indicateur ALT RATE (panneau 1), et les données de vitesse latérale sont acheminées vers les indicateurs X-pointer (panneaux 1 et 2). Les données de vitesse et de position sont acheminées vers la section de calcul du guidage, pour le calcul des paramètres orbitaux du LM.
- La section de calcul de guidage assure le calcul et la sélection de la trajectoire, le calcul de la direction et la correction à mi-course. Elle reçoit les vecteurs d’état du LM et du CSM, fournis par le LGC ou par une autre source externe via la logique de sélection d’entrée de l’AGS. Le vecteur d'état est l'attitude et la vitesse du véhicule pour un temps de mission donné. Les erreurs de direction par rapport au corps sont reçues de la section de calcul de stabilisation et d'alignement, pour le calcul de la trajectoire. Le problème de guidage d'abandon du LM consiste à résoudre les équations de la manœuvre de guidage sélectionnée, y compris les calculs de direction, d'attitude et de contrôle du moteur. Les sorties de la section de calcul du guidage comprennent , par l'intermédiaire des circuits logiques de sélection des sorties, les signaux de mise en marche et d'arrêt du moteur vers le CES (Control Electronics Section), et la vitesse à gagner, sélectionnable par la lecture du DEDA.
L'AEA exécute 27 instructions de base et fonctionne à une fréquence d’horloge de 1,024 MHz. Une liaison descendante de télémétrie numérique de 50 mots est émise par l’AEA à raison d’une fois par seconde.
Les circuits intégrés, les réseaux à couches minces et les cartes de circuits imprimés multicouches sont largement utilisés pour minimiser sa taille et sa masse. Tous les sous-ensembles, à l'exception de l'alimentation électrique, sont emballés en groupes de cartes multicouches interconnectées par une matrice de câblage. Les cartes multicouches sont connectées à la matrice au moyen d'un câblage à broches multiples. La matrice transporte toutes les lignes de signaux entre la mémoire centrale, la logique arithmétique et de commande, et les circuits d'entrée/sortie. L'alimentation est distribuée par des barres de bus laminées encapsulées dans la matrice de câblage. Les modules d'alimentation utilisent une construction en bois de corde. Les plaques latérales de l'AEA sont fixées à des rails froids sur lesquels il est monté dans la baie d'équipement arrière du LM. L'AEA dissipe 81 watts de puissance. Sa plage de température de fonctionnement est de -1,1° à 48,8°C (30 à 120 °F).
L'AEA peut traiter les données du radar de rendez-vous mais pas celles du radar d'atterrissage, ce qui est cohérent avec sa fonction d’abandon. Il n'y a pas d'interaction entre les systèmes AGS et AGC, autre qu'une liaison descendante permettant à l'AGS d'obtenir les informations d'initialisation du vecteur d'état pour sa propre navigation, évitant ainsi la saisie manuelle de ces données.
Le logiciel de l'AEA
Les premières idées de conception du système de guidage d'abandon n'incluaient pas l'utilisation d'un ordinateur, mais reposaient sur un séquenceur sans aucune capacité de navigation.
Le logiciel AGS est écrit en langage d'assemblage LEMAP qui utilise 27 instructions et un ensemble de pseudo-opérations employées par l'assembleur. Le format d'instruction de l'AEA se compose d'un code d'instruction à cinq bits, d'un bit d'index et d'une adresse à 12 bits.
Le développement du logiciel comprend la formulation des exigences de base et des procédures de développement, les méthodes de vérification et l'utilisation du logiciel.
Description fonctionnelle du logiciel
Les exigences de base suivantes de la mission ont régi le développement du logiciel.
1) L'insertion orbitale doit être réalisée dans une périlune supérieure à 9144 m (30 000 ft).
2) L'abandon vers un rendez-vous à partir de n'importe quel point de la mission du LM doit être accompli dans les limites de carburant du LM. La vitesse différentielle totale de remontée (Δv) est de 1946 m/sec (6386 ft/sec), dont 7,6 m/sec (25 ft/sec) sont réservés à l'amarrage.
3) L'erreur de navigation maximale encourue pendant la descente motorisée, le vol stationnaire et la remontée motorisée ne doit pas dépasser 762 m (2500 ft) en position et 1,2 m/sec (4 ft/sec) en vitesse.
4) L'AGS doit amener le LM à l’intérieur d’une sphère de 9,3 km (5 milles nautiques) autour du CSM, avec une erreur de vitesse de navigation inférieure à 9 m/sec (30 ft/sec).
La contrainte de carburant s'avère variable, car le Δv disponible diminue à mesure que la masse du véhicule augmente au cours du programme. Le Δv disponible pour le rendez-vous après l'insertion, la considération principale, diminue de 155 m/sec (509 ft/sec) à 106 m/sec (349 ft/sec) au cours du programme. Pour satisfaire aux exigences du logiciel, les capacités suivantes sont nécessaires.
1) Navigation des véhicules LM et CSM
2) Initialisation des vecteurs d'état du LM et du CSM
3) Alignement de la référence inertielle sur un système de coordonnées sélectionné
4) Maintien des informations d'attitude du véhicule par rapport à l'espace inertiel
5) Direction du véhicule
6) Calibrage et compensation des paramètres du gyroscope et de l'accéléromètre
7) Résolution de l'équation de guidage
8) Génération de données de surveillance pour les affichages et la télémétrie
9) Vérification automatique en vol de la mémoire et de la logique de l'ordinateur.
Pour répondre à ces exigences, les fonctions de navigation, d'alignement, de calibration, de traitement des données radar, ainsi que les routines de guidage, de contrôle d'attitude et de commande moteur sont mises en œuvre.
Un programme livrable, comprenant les constantes de mission et les constantes de compensation matérielle de l'ASA, est établi pour chaque vol pour les 2048 mots câblés de la mémoire de l'AGS. Les programmes de vol individuels sont des versions modifiées d'un DMCP livré en mars 1967. Ce programme, bien que n'étant pas un programme de vol, est utilisé dans l'installation de simulation à six degrés de liberté du contractant pour vérifier les performances de l'AGS pour la mission de référence et pour satisfaire la responsabilité du contractant concernant le système AGS.
Le développement du logiciel, prévu au début du programme, est basé sur une série de cinq rapports de conception espacés de 11 mois, fournis par le fournisseur du logiciel en réponse à trois paquets de données provenant du MSC et entrelacés avec ceux-ci. Les cinq rapports de conception comprennent les documents suivants :
- rapport de conception (Design Report ou DR) 1
- rapport d'analyse préliminaire : DR 2
- spécification du programme et plan d'essai des équations : DR 3
- résumé des résultats de la simulation des équations, document sur les équations, procédures d'exploitation, plan de vérification du programme et rapport d'analyse des performances : DR 4
- résumé des résultats des essais de vérification du programme, document sur les équations programmées, rapport d’examen de l’analyse des performances, liste des programmes, jeux de cartes binaires et symboliques, et bande du programme : DR 5
Les trois paquets de données du MSC contiennent les exigences spéciales de la mission et la trajectoire de mission affinée, comprenant la trajectoire de référence préliminaire de la mission, la trajectoire de référence et la trajectoire opérationnelle. La spécification de performance et d'interface du logiciel AGS contient toutes les autres informations nécessaires au développement du logiciel.
Le nombre de rapports de conception s'avère difficile à gérer et trop long, les cinq rapports sont alors regroupés en trois. Le calendrier de développement est ensuite révisé, comme suit, en termes de temps avant le lancement :
1) À 12,5 mois avant le lancement, le paquet de données 1 du MSC, contenant la trajectoire de référence préliminaire et les exigences de la mission, est livré au sous-traitant.
2) 11 mois avant le lancement, le DR 1 du sous-traitant, contenant la spécification du programme et l'analyse préliminaire des performances de la mission AGS, est remis au MSC.
3) 10,5 mois avant le lancement, le MSC effectue une revue critique de la conception du DR 1.
4) 8 mois avant le lancement, le paquet de données 3 du MSC, contenant la trajectoire de référence de la mission, est livré au sous-traitant.
5) 7 mois avant le lancement, le DR 2 du sous-traitant, comprenant les résultats des tests d'équation, un plan de test de vérification et un programme préliminaire, est remis au MSC.
6) 6,5 mois avant le lancement, le MSC effectue l'inspection de la configuration du premier article (First Article Configuration Inspection ou FACI) de DR 2.
7) 5 mois avant le lancement, le DR 3 du sous-traitant, qui comprend un programme de vol vérifié et la documentation connexe, est remis au MSC.
8) 4,5 mois avant le lancement, le MSC effectue une revue de préparation à l'acceptation par le client (Customer Acceptance Readiness Review ou CARR) du DR 3.
9) 3 mois avant le lancement, le paquet de données 3 du MSC, contenant la trajectoire de vol opérationnelle, est livré au sous-traitant.
10) 2 mois avant le lancement, le sous-traitant effectue l'analyse finale des performances sur la base du paquet de données 3, et le SMC effectue la revue de préparation au vol (Flight Readiness Review ou FRR).
11) 1,5 mois avant le lancement, le sous-traitant livre la bande des constantes finales du programme pour le chargement sur ordinateur.
Après la livraison du programme de base, la procédure de développement pour le reste des programmes de vol est raccourcie pour commencer 9 mois avant le lancement et simplifiée comme suit.
1) 9 mois avant le lancement, le paquet de données du MSC, contenant les exigences de la mission et la trajectoire de référence, est livré au sous-traitant.
2) 8 mois avant le lancement, le rapport de conception provisoire du sous-traitant, contenant l'état du programme, le plan des essais de vérification et le plan des essais d'analyse des performances, est remis au MSC.
3) 7,5 mois avant le lancement, le MSC effectue la revue FACI du rapport de conception provisoire.
4) 6 mois avant le lancement, le sous-traitant fournit les modifications préliminaires de l'organigramme, les modifications des procédures d'exploitation et la spécification finale du programme informatique. Le programme non vérifié est livrable à ce moment-là pour être incorporé dans le FMES du maître d'œuvre et dans la simulation hybride du MSC.
5) 5 mois avant le lancement, le sous-traitant livre le programme, y compris les résultats des essais de vérification, les résultats de l'analyse des performances, le document des équations programmées, le manuel d'exploitation et un rapport de conception. Le programme est livré sous la forme d'un jeu et d'un listing binaire, d'une bande de chargement de l'équipement de test au banc et d'une bande d'équipement de contrôle d'acceptation (ACE) pour l'utilisation du véhicule.
6) 4,5 mois avant le lancement, le MSC effectue un CARR du programme livré.
7) 8 semaines avant le lancement, la trajectoire opérationnelle, les données de mission et les constantes du MSC sont fournies au sous-traitant.
8) 5 semaines avant le lancement, le sous-traitant livre le programme de vol final avec les constantes mises à jour au format ACE et l'analyse finale des performances. Un FRR est effectué au MSC. Le comité de révision du logiciel du sous-traitant approuve la version. Avant la soumission de la documentation par le sous-traitant, un comité interne d'examen des logiciels du sous-traitant approuve la version.
Le matériel de l'AGS évoluant tout comme celui du PGNCS, son logiciel doit être également revu plusieurs fois pour en corriger les erreurs et pour en réduire la taille. A l'image des problèmes de mémoire du PGNCS, en 1966, deux années complètes avant la première mission active utilisant le LM, il ne reste plus que 20 mots sur les 4000 de la mémoire de l'AGS. La gestion minutieuse de la mémoire devient la priorité de TRW et de la NASA. Les changements doivent tous être effectués dans la partie effaçable, car la partie fixe a été programmée tôt et est restée réglée pour économiser de l'argent. Cependant, la modification de la mémoire effaçable s’avère très coûteuse et complexe, les développeurs se battant pour libérer de l’espace un emplacement à la fois. Certaines décisions logicielles doivent être révisées pour éviter des effets potentiellement désastreux.
Le programme de redémarrage du PGNCS a été décrit : un redémarrage efface toutes les combustions du moteur. Les premières versions du logiciel de l’AGS provoquaient également l’arrêt du moteur et la mise en attente de l’attitude lors d’un redémarrage. Cela pouvait être dangereux si un redémarrage se produisait alors que le LM était proche de la surface lunaire. La solution consistait à confier à l’équipage la responsabilité de rallumer manuellement les moteurs lors d’un redémarrage si nécessaire. Certaines versions connues du logiciel sont utilisées pour des tests sans équipage et avec équipage.
Anecdote : L'une des méthodes de vérification du logiciel était originale. Pour simuler le mouvement et fournir des entrées plus réalistes à l'ordinateur, les planificateurs utilisaient une camionnette contenant le matériel et le logiciel. Les techniciens conduisaient la camionnette autour de Houston avec les programmes en cours d'exécution à l'intérieur.
L'ASA (Abort Sensor Assembly)
L'ASA est un système inertiel à composants liés (strapped-down), fixé à la structure du LM et orienté de manière à ce que les axes de référence des coordonnées correspondent aux axes du véhicule. Cet appareillage pèse 9,4 kg (20,7 livres) et ses dimensions sont de 12,9 par 22,8 par 29,2 cm (5,1 par 9 par 11,5 in). Sa puissance dissipée de l'ASA est de 74 watts. La précision de montage nécessaire de l'ASA est obtenue mécaniquement à 2 minutes d'arc près grâce à quatre pieds usinés montés sur la base de navigation du LM à l'extérieur et au-dessus de la cabine du LM.
L'ASA détecte et mesure les accélérations et les rotations angulaires autour des axes du LM, convertit ces mouvements en incréments discrets et transmet ces incréments sous forme d'impulsions à l'AEA pour traitement. L'ASA comprend :
• trois gyroscopes flottants, équilibrés par impulsions, à un seul degré de liberté et à intégration de fréquence ;
• trois accéléromètres pendulaires amortis par fluide et l'électronique de torsion d'impulsion associée ;
• un sous-ensemble de décompte de fréquence ;
• des unités de contrôle de température grossière et fine ;
• une alimentation électrique ;
• et une électronique d'interface.
L'ASA utilise un couple d'impulsions de courant pour rééquilibrer la sortie des capteurs. Les mouvements du véhicule détectés par les capteurs sont convertis en tensions AC (courant alternatif) proportionnelles à la magnitude et à la phase du mouvement. La sortie de chaque gyroscope est appliquée à un servoamplificateur à couple pulsé (Pulse Torquing Servoamplifier, PTSA) qui quantifie les signaux et fournit des impulsions de sortie à l'AEA à 64 000 impulsions/seconde ainsi qu'au capteur pour le rééquilibrage du couple à 1 kilohertz. Les gyroscopes utilisés dans l'ASA sont spécifiquement développés pour l'utilisation en mode strapped-down (sanglé). Les accéléromètres sont des unités 2401, remplaçant les Bell VII en raison de contamination. Les capteurs et leur électronique sont montés orthogonalement sur un bloc de béryllium pour le contrôle thermique. La température de fonctionnement est maintenue par une commande à point unique, assurée par deux dispositifs : une commande de préchauffage rapide pour réduire le temps de montée en puissance, et une commande de température fine pour maintenir la température de fonctionnement critique de 322 K (120' F). Deux capteurs, placés mécaniquement dans les pieds diagonaux d'un pont, détectent les variations de température.
Les gyroscopes et les accéléromètres fonctionnent sur le principe de l'équilibre des couples et utilisent des servoamplificateurs communs à couple d'impulsion. Le courant modulé dans le temps compense les vitesses angulaires et les accélérations d'entrée via un système de torsion à impulsions à cycle limite forcé. Le couple binaire utilisant des périodes alternées de courant positif et négatif plutôt que des impulsions discrètes fournit un taux d'information angulaire élevé et un faible taux de commutation. Les impulsions des servoamplificateurs de couple à impulsions vers l'AEA sont quantifiées à 2-16 rad/impulsion pour les gyroscopes et à 0,000952 m/sec/impulsion (0,003125 ft/sec/impulsion) pour les accéléromètres et sont fournies à un taux maximum de 64 000 impulsions/sec.
Étant donné la nature fixe d'un système de guidage à composants liés, les étalonnages complets nécessitant une rotation ne peuvent être effectués dans un véhicule. Cependant, un programme d'étalonnage prélancement sur Terre (Earth Prelaunch Calibration ou EPC) utilisé dans l'AEA permet de déterminer la dérive du gyroscope lorsque l'azimut et la latitude du véhicule sont connus.
LE DEDA
Le DEDA (Data Entry and Display Assembly) est l’interface par laquelle les astronautes communiquent avec l’AEA. Il sert à la saisie et à la lecture des données de l’AGS. Plus petit et moins polyvalent que le DSKY, il est situé sur le côté droit du panneau de contrôle du LM, devant le pilote. Le DEDA se compose de deux ensembles principaux :
• un panneau de commande abritant l'affichage numérique électroluminescent (EL) et les boutons poussoirs de saisie de données ;
• d'un boîtier logique, hermétiquement scellé, contenant neuf cartes de circuits imprimés multicouches avec circuits plats et réseaux à couches minces, ainsi que circuits de commande, circuits d’entrée/sortie, et circuits de conditionnement de puissance.
Le DEDA a accès à 452 des 4096 emplacements mémoire de l'AEA. La saisie manuelle s'effectue à l'aide de 4 boutons poussoirs :
- "effacer" Clear (CLR) efface l'écran des saisies et le voyant OPR ERR),
- "lire" (READOUT) : pour lire les données à partir de l'adresse indiquée et affiche les données rafraîchies toutes les 0,5 s,
- "entrer" (ENTER) pour saisir les entrées données/adresses,
- "maintenir" (HOLD) : pour stopper la sortie en continu de données.
En outre, 10 boutons poussoirs pour les chiffres de 0 à 9 et 2 autres pour les signes arithmétiques (+ et -) sont disponibles. Un voyant OPR ERR signale une erreur opérateur. Ses dimensions sont 14 x 15 x 13 cm et sa masse est de 3,4 kg. Certaines fonctionnalités du système ont été intégrées dans le DEDA, contrairement au DSKY utilisé par AGC. Sa puissance de fonctionnement est 10 watts fournie par l'AEA. Le DEDA est monté sans rails froids dans la cabine du LM.
L'affichage consiste en un écran EL à neuf fenêtres. Trois chiffres sont utilisés pour afficher, sous forme octale, l'adresse de l'emplacement mémoire dans lequel l'information doit être insérée ou à partir duquel l'information doit être extraite. Six chiffres, dont le premier est le signe arithmétique, sont utilisés pour afficher des informations numériques. Le transfert d'informations du DEDA vers l'AEA s'effectue au moyen d'un mot numérique série de 36 bits. Les paramètres d'affichage de l'AEA sont mis à jour deux fois par seconde.
LE TABLEAU DE BORD
Les commandes et les affichages permettent aux astronautes de surveiller et de gérer les sous-systèmes du LM et de le contrôler manuellement pendant la séparation, l'amarrage et l'atterrissage.
Tout comme dans le CM, une approche standard est utilisée pour l'emplacement et la disposition des D&C (Displays and Controls) dans le LM. Les affichages et les commandes de vol, en raison de leur nature critique inhérente et de leur utilisation fréquente, sont placés dans les panneaux principaux. Les affichages et les commandes de tous les autres systèmes de l'engin spatial sont généralement regroupés par système et placés en fonction de leur criticité, de leur fréquence d'utilisation, du partage des tâches entre les membres de l'équipage et de l'utilisation la plus efficace de l'espace disponible sur les panneaux. L'attribution des D&C à (et parfois entre) des membres d'équipage particuliers, en général, sont instituée selon les pratiques aérospatiales standard. Cependant, certains éléments sont situés de manière à ce que les membres d'équipage puissent y accéder mutuellement ou sont dupliqués au poste de vol du LMP afin de mettre en œuvre la responsabilité du copilote. Les postes LMP disposent également de D&C de gestion des sous-systèmes qui reflétent les responsabilités supplémentaires de mécanicien naviguant du LMP.
Les affichages annonciateurs s’allument en cas de dysfonctionnement des sous-systèmes du LM ; en même temps, deux voyants d’alarme principale clignotants et une tonalité d’alarme (dans les casques des astronautes) sont activés. Les affichages numériques et analogiques fournissent aux astronautes des informations sur l’état des sous-systèmes, telles que les quantités de gaz et de liquide, les pressions, les températures et les tensions.
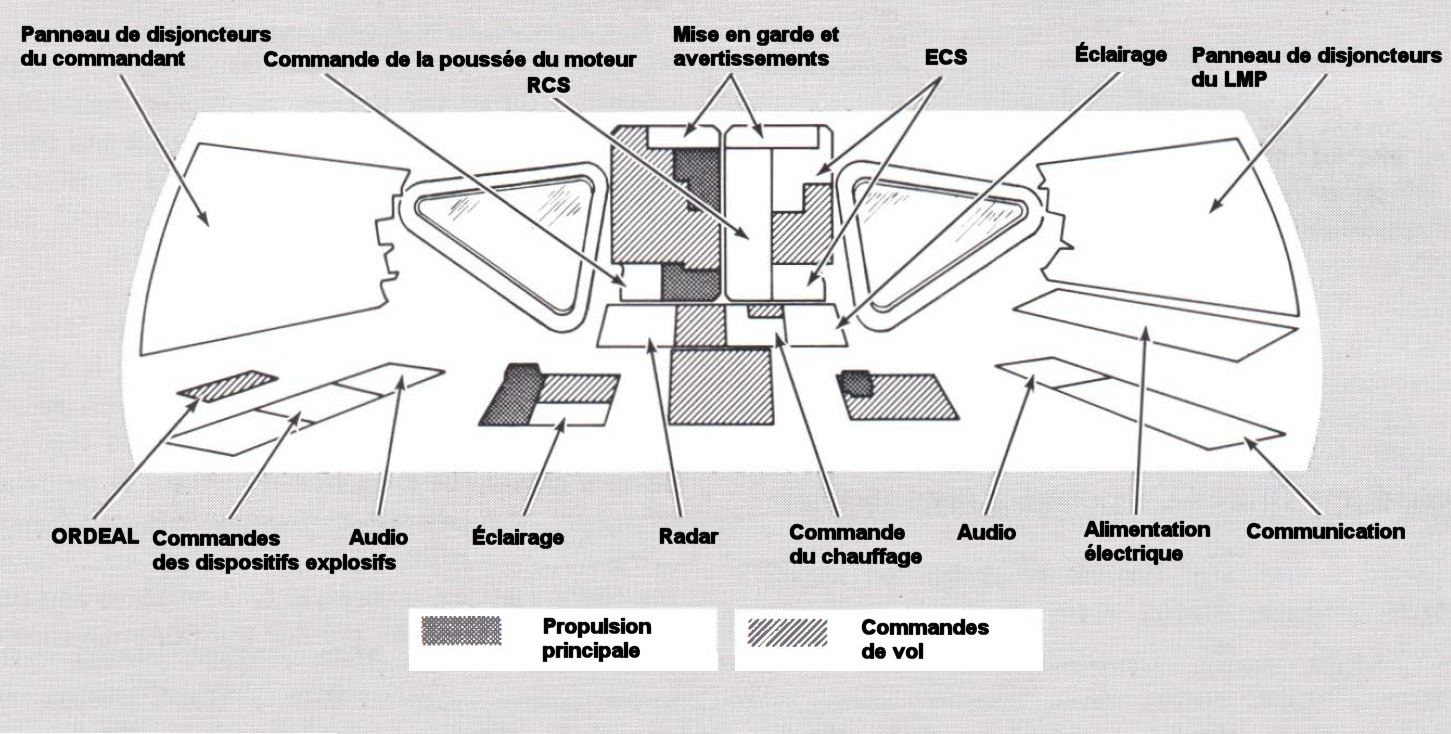
Il y a 12 panneaux de commande et d'affichage. Les principaux panneaux de commande et d'affichage (1 et 2) sont inclinés et centrés entre les stations de vol. Les panneaux 3 et 4 se trouvent sous ces panneaux, à portée de main et de regard des deux astronautes. Les panneaux 5, 8 et 11 sont destinés à être utilisés par le commandant. Les panneaux 6, 12, 14 et 16 sont destinés à être utilisés par le pilote LM.
Le panneau 1, directement face au commandant, contient diverses commandes et affichages, notamment des voyants d’avertissement, des compteurs numériques, des instruments de navigation, des interrupteurs de commande de la poussée du moteur et des indicateurs de moteur, de carburant et d’altitude.
Le panneau 2, directement en vue du pilote LM, contient des voyants d’avertissement, des indicateurs de contrôle de réaction, des indicateurs de contrôle environnemental, des instruments de navigation et divers autres indicateurs et interrupteurs.
Le panneau 3 contient des commandes et des affichages pour le radar, la stabilisation et le contrôle, le contrôle du chauffage, une minuterie d’événement et l’éclairage. Le panneau 4 contient un ensemble écran et clavier. L’écran et le clavier (DSKY) assurent une liaison de communication bidirectionnelle entre les astronautes et l’ordinateur de guidage du LM. Le panneau contient des voyants lumineux, des boutons-poussoirs, des affichages de données et des interrupteurs à bascule. Devant les postes du commandant et du pilote, à hauteur de la taille, se trouvent les panneaux 5 et 6, respectivement. Le panneau 5 contient les commandes d’éclairage et de minuterie de mission, les boutons-poussoirs de démarrage et d’arrêt du moteur, ainsi qu’un bouton-poussoir de translation en X. Les commandes de guidage d’abandon se trouvent sur le panneau 16.
 Localisation des panneaux de commandes dans l'habitacle |
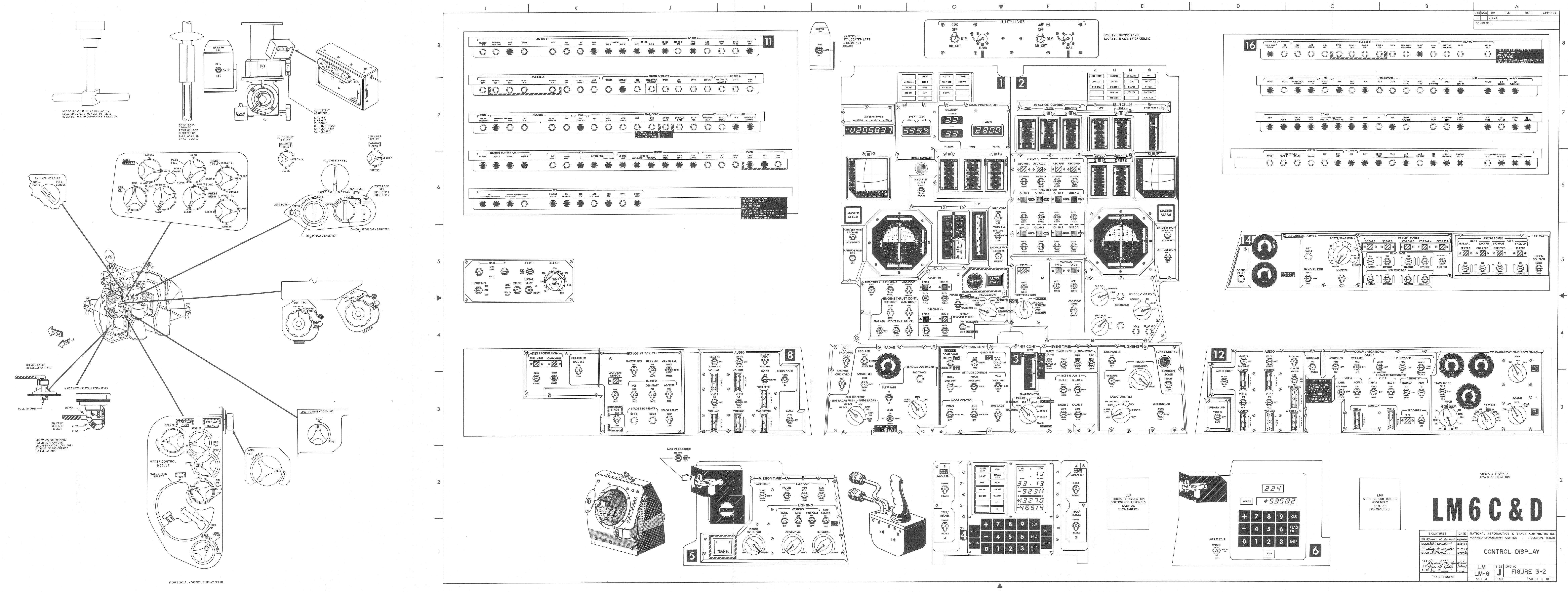 Vue d'ensemble des différents panneaux |
À gauche du poste du commandant se trouve le panneau 8, qui est incliné vers le haut de 15° par rapport à l'horizontale. Ce panneau contient les commandes et les affichages des dispositifs explosifs et de la propulsion de descente, ainsi que les commandes audio. Le panneau d'affichage du taux d'orbite terrestre et lunaire (ORDEAL pour Orbital Rate Display - Earth and lunar), situé à l'arrière et au-dessus du panneau 8. Le panneau 11, directement au-dessus du panneau 8, comporte cinq surfaces angulaires qui contiennent des disjoncteurs. Chaque rangée de disjoncteurs est inclinée de 15° par rapport à la ligne de visée, de sorte qu'une bande blanche autour des disjoncteurs est visible lorsque les disjoncteurs sont ouverts.
L'ORDEAL est un dispositif électromécanique qui offre une alternative à l'affichage du tangage de l'indicateur d'attitude du directeur de vol. Il produit un affichage de l'indicateur d'attitude du directeur de vol de l'affichage de l'indicateur d'attitude vertical local de l'ordinateur de l'attitude verticale locale calculée pendant les orbites circulaires terrestres ou lunaires. |
À droite de la station du pilote se trouve le panneau 12, qui est incliné vers le haut de 15° par rapport à l’horizontale. Ce panneau contient les commandes et les affichages de l’audio, des communications et de l’antenne de communication. Directement au-dessus de celui-ci se trouve le panneau 14. Il est incliné vers le haut de 36,5° par rapport à l’horizontale et contient des commandes et des affichages pour la distribution et la surveillance de l’énergie électrique. Le panneau 16, directement au-dessus du panneau 14, comporte quatre surfaces inclinées qui contiennent des disjoncteurs. Ainsi, une bande blanche est visible autour des disjoncteurs lorsque ceux-ci sont ouverts.
À droite de chaque station de vol se trouve une poignée-pistolet (ensemble de contrôle d’attitude), utilisée pour contrôler les changements d’attitude du LM. À gauche de chaque station de vol se trouve une commande à poignée en T (ensemble de commande de poussée/translation). Cet ensemble, un contrôleur intégré de translation et de poussée, est utilisé pour commander les translations du véhicule en actionnant les propulseurs du RCS et pour accélérer le moteur de descente. Un télescope optique d’alignement est situé entre et au-dessus des stations de vol ; il s’agit d’un dispositif de type périscope à commande manuelle et à puissance unique. Il est utilisé pour déterminer la position du LM à l’aide d’un catalogue d’étoiles stocké dans l’ordinateur de guidage du LM et des mesures célestes effectuées par les astronautes. Une commande de lumière utilitaire, centrée au-dessus des postes de vol, comprend deux interrupteurs et deux luminaires portables, un pour le commandant et un pour le pilote du LM.
Les commandes du sous-système de contrôle environnemental sont regroupées sur la cloison arrière, derrière le pilote du LM.
Le saviez-vous ? Le LM, tout comme le CM, est conçu pour pouvoir être piloté en cas d'urgence par un seul membre d'équipage. Le fonctionnement normal, cependant, exige un équipage de deux personnes, avec le commandant (CDR) en position gauche et le pilote du LM (LMP) en position droite.
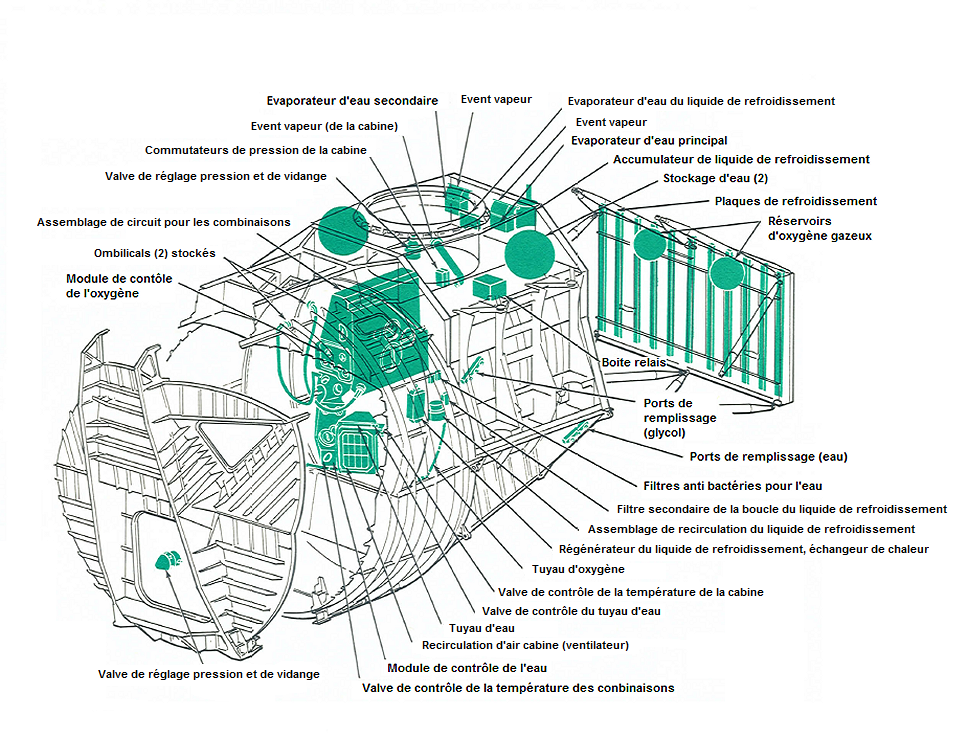
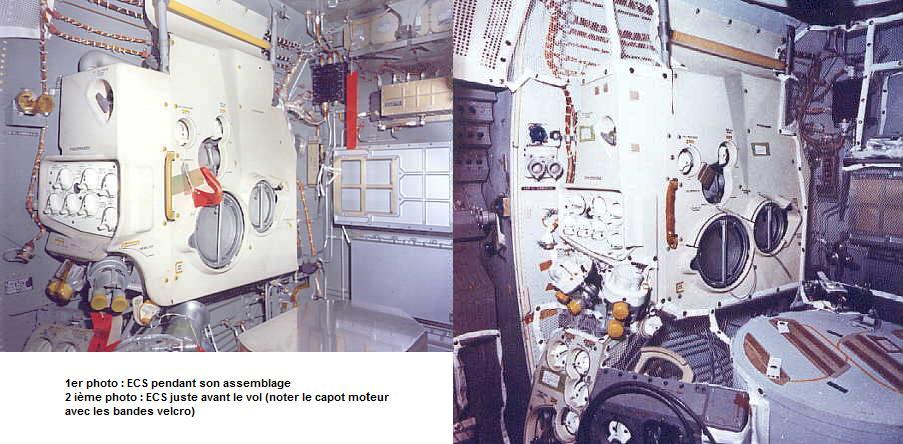
L'ECS
Le sous-système de contrôle environnemental (ECS) fournit un environnement habitable pour deux astronautes pendant que le LM est séparé du CSM, et permet aux astronautes de décompresser et de repressuriser la cabine conformément aux exigences de la mission. Il contrôle également la température des équipements électroniques et fournit de l'eau pour la boisson, le refroidissement, l'extinction des incendies et la préparation des aliments. Le côté droit de la section médiane du LM contient la plupart des commandes de l'ECS et la majeure partie de la tuyauterie eau-glycol de la section de transport de chaleur. Les vannes de commande de l'ECS sont facilement accessibles depuis le compartiment de l'équipage.
L'ECS assure la stabilité thermique de l'équipement électronique du GN&CS, sensible à la température. L'équipement électronique (à l'exception de l'IMU) est monté sur des plaques et des rails froids dans lesquels le liquide de refroidissement ECS (solution d'éthylène glycol et d'eau) est acheminé pour évacuer la chaleur. Pour refroidir l'IMU, le liquide de refroidissement traverse son boîtier. La chaleur qui est retirée de l'équipement est évacuée à l'extérieur par les sublimateurs ECS.
ARS : section/système de revitalisation de l'atmosphère (Atmosphere Revitalization Section).
OSCPCS : section de contrôle de l'alimentation en oxygène et de la pression cabine (Oxygen Supply and Cabin Pressure Control Section).
WMS : système de gestion de l'eau (Water Management Section).
HTS : système de transport et évacuation de la chaleur (Heat Transport Section).
 |
 |
L'ARS purifie et conditionne l'oxygène de la cabine et des combinaisons spatiales. Pour cela, il se compose d'un ensemble de circuit pour les combinaisons, d'un ensemble de refroidissement liquide pour combinaison et d'un conduit flexible de vapeur menant à un évent. L'ensemble du circuit pour combinaison est un système de recirculation en boucle fermée qui refroidit et ventile les ensembles de vêtements sous pression (PGA's), maintient un niveau souhaitable de dioxyde de carbone dans l'atmosphère, élimine les odeurs, les particules, les gaz nocifs et l'humidité excessive, permet de contrôler la température du flux d'oxygène vers les PGA's et, si nécessaire, isole automatiquement les PGA's du système. L'ensemble de refroidissement liquide pour combinaison fait circuler l'eau et contrôle sa température dans le vêtement refroidi par liquide (LCG), fait circuler l'air de la cabine, si nécessaire, et élimine la poussière lunaire de la cabine pendant l'ascension depuis la surface lunaire. Le conduit flexible de vapeur transporte la vapeur évacuée par le sublimateur d'eau du circuit des combinaisons, lorsqu'il fonctionne, vers le vide ambiant. La circulation de l'oxygène est maintenue par des ventilateurs centrifuges. Le chauffage et le refroidissement sont eéalisés en faisant passer l'oxygène à travers des échangeurs de chaleur, où la chaleur est soit cédée, soit récupérée du liquide de refroidissement du HTS. Les séparateurs d'eau éliminent l'excès d'humidité après la phase de refroidissement.
L'OSCPCS stocke l'oxygène gazeux et maintient la pression de la cabine et des combinaisons en fournissant l'oxygène à l'ARS. Les pertes dues à la consommation métabolique de l'équipage et aux fuites de la cabine ou des combinaisons sont ainsi compensées. Il y a quatre réservoirs d'oxygène : deux, dans l'étage de descente, fournissant l'oxygène pendant les phases de descente et de séjour lunaire de la mission ; deux, dans l'étage de remontée, utilisés pendant les phases de remontée et de rendez-vous.
Le WMS fournit de l'eau potable, de refroidissement, pour lutter contre d'éventuel incendie, pour la préparation des aliments, pour le remplissage du réservoir d'eau de refroidissement des PLSS. Il prévoit également la fourniture d''eau provenant des séparateurs d'eau de l'ARS aux sublimateurs du HTS ainsi que des réservoirs d'eau à l'ARS et aux sublimateurs du HTS.
Le LM est alimenté par des batteries plutôt que par des piles à combustible. Il n'est donc pas possible de produire de l'eau à partir d'une pile à combustible embarquée. L'eau potable, chargée avant le lancement, est stockée dans trois réservoirs, un réservoir de 151 kg dans l'étage de descente et deux réservoirs de 19 kg dans l'étage de remontée. Le réservoir de l'étage de descente fournit toute l'eau nécessaire à la descente en orbite lunaire et à l'exploration de la surface lunaire. Les réservoirs de l'étage de remontée fournissent l'eau pendant les phases d'ascension, de rendez-vous et de d'ammarrage. Pour les missions Apollo 15, 16 et 17, qui comportaient des séjours lunaires prolongés, un réservoir supplémentaire de 151 kg a été installé dans l'étage de descente. Le système d'eau du LM est pressurisé par de l'azote gazeux à 3,1 x 105 N/m² (45 psi). Cette pression est transmise à l'eau par des vessies en caoutchouc de silicone (Silastic) ® dans chacun des réservoirs d'eau. Le refroidissement du LM est assuré par un sublimateur à eau. Ce dispositif, dont le fonctionnement est similaire à celui du CM, sublime la glace dans le vide spatial par l'intermédiaire d'une plaque de nickel fritté. Comme dans le CM, l'eau d'alimentation est fournie par le système d'eau potable du vaisseau spatial. L'exigence de minimiser les solides est encore plus stricte pour le fonctionnement du sublimateur du LM. Par conséquent, de l'eau distillée a été introduite dans les réservoirs afin de réduire au minimum le risque d'obstruction des petits pores de la plaque de nickel du sublimateur. Le risque potentiel de connexion croisée entre le condensat d'humidité et le système d'eau potable a nécessité l'utilisation d'un système de désinfection de l'eau dans le LM ainsi que dans le CM.
L'iode a été choisi comme biocide pour le système de gestion de l'eau du LM parce qu'il a été constaté que le chlore causait des problèmes de fonctionnement avec les unités de sublimation. Les spécifications de la NASA en matière d'eau potable exigent que la concentration résiduelle minimale d'iode soit de 0,5 mg/litre. Environ 7 jours avant le décollage, à l'aide de l'équipement de soutien au sol, le système de gestion de l'eau est rempli d'eau contenant une solution d'iode de 30 mg/litre pour la désinfection. Après trois à quatre heures de contact, environ un quart de l'eau chargée est vidangé et de l'eau non iodée est ajoutée. Ce processus a permis d'obtenir une concentration finale d'iode de 11 à 13 mg/litre. Il n'a pas été prévu d'ajouter de l'iode aux réservoirs de stockage de l'eau pendant le vol. Dans la plupart des cas, la vitesse de dégradation de l'iode dans le système était telle que les concentrations initiales de la charge étaient suffisantes pour assurer une action biocide pendant toute la durée de la mission du LM.
Les concentrations d'iode ont été vérifiées trois fois avant le décollage et des courbes d'épuisement ont été tracées à partir des données. Le taux d'épuisement, prévu pour la durée du vol, devait être suffisamment faible pour qu'une concentration d'iode d'au moins 0,5 mg/litre soit maintenue pendant la période d'occupation du module lunaire. Lorsque les données avant le vol indiquaient un taux d'épuisement trop rapide pour maintenir un résidu d'iode adéquat pendant la mission, un filtre bactérien a été installé dans la conduite juste en amont de l'orifice d'utilisation de l'eau.
La qualité chimique avant vol de l'eau chargée par l'équipement de soutien au sol du module lunaire et de l'eau du système du vaisseau spatial ont montrées des résultats "hors limites". Comme pour le CM, la comparaison de ces données avec les exigences des spécifications montre que la plage supérieure de certains paramètres dépassait légèrement les limites des spécifications. Il s'agit de la turbidité du point d'essai 2 et du nickel dans les échantillons du point d'essai 3. Ces dépassements n'ont pas été considérés comme médicalement significatifs. Aucune donnée n'a été recueillie pour déterminer la qualité de l'eau potable du LM en vol.
Le saviez vous ?? L'eau utilisée pour remplir l'équipement de soutien au sol avant le chargement du vaisseau spatial provient des ressources de la ville de Cocoa, en Floride. L'eau de la ville est filtrée à travers des filtres à particules, des filtres à charbon et deux échangeurs d'ions à lit mixte. Cette eau, qui doit répondre à des critères précis de qualité, est ensuite passée à travers des filtres bactériens de 0,22 μm avant d'être introduite dans les unités d'équipement au sol du CM et du LM. Cette eau répond aussi à des exigences en matière de qualité chimique.
Le HTS est constitué d'une boucle principale de refroidissement et d'une boucle de refroidissement secondaire. La boucle secondaire sert de boucle de sauvegarde ; la boucle de refroidissement secondaire, n'est utilisée seulement que si la boucle principale est inopérante. Un mélange eau/glycol circule dans chaque boucle. La boucle principale fournit le contrôle de température pour les batteries, l'équipement électronique qui exige un contrôle thermique actif ainsi que pour l'oxygène qui circule dans la cabine et les combinaisons spatiales. Le rejet de chaleur résiduelle en vol des deux circuits de refroidissement est réalisé par le sublimateur principal et secondaire, qui l'évacue "par dessus bord". Un ensemble de pompe de recirculation du liquide de refroidissement contient toutes les pompes de refroidissement du HTS associées avec des soupapes de contrôle et de sûreté. Le débit du liquide de refroidissement de l'ensemble est réalisé par le biais de circuits parallèles aux plaques froides pour le matériel électronique et des échangeurs de chaleur oxygène/gycol dans l'ARS.
DONNÉES DE RÉFÉRENCES RAPIDES SUR L'ECS
ARS
Pression cabine : 4,8 ± 0,2 psia (normal, état stable).
Pression circuit des combinaisions :
- mode cabine : 4,8 ± 0,2 psia (peut excéder 5,0 psia au cours de vol propulsé).
- mode sortie :
3,8 ± 0,2 psia (4,7 psia au cours de vol propulsé).
Variations de température d'admission des combinaisons : avec la valve de contrôle de température de la combinaison en position froide maximum, on obtient des gammes de température allant de 3,3°C à 18,3°C ; en position chaude maximum, 5,5°C à 37,5°C.
Température cabine : de 12,7°C à 32,2°C.
Humidité relative : 40 % à 80 %.
Débit du flux dans le circuit des combinaisons :
- à 4,8 psia - 18 kg par heure (minimum).
- à 3,8 psia - 14,2 kg par heure (minimum).
OSCPCS
Augmentation de pression des combinaisons : la première augmentation de 1 psi est atteinte en moins d'une seconde. Par la suite, il faut au moins 8 secondes pour toute nouvelle augmentation de 1 psi.
Repressurisation de la cabine et taux d'approvisionnement de la valve d'oxygène de secours :
- mode descente : 2 kg par minute (maximum).
- mode remonté : 4 kg par minute à 700 psia.
Recharge des PLSS : environ 400 gr /recharge à 850 psia.
Volume de la cabine : 6,65 m3.
Efficacité du filtre anti bactérien de la valve de vidange : supprime 95% de toutes les bactéries de plus de 0,5 micron.
Taux de vidange manuel de la pression cabine (sans apport d'oxygène) : valve de vidange dans l'écoutille avant, avec filtre anti bactérien, de 5,0 psia à 0,08 psia en 310 secondes; écoutille supérieure, sans filtre, en 180 secondes; les deux valves, sans filtre, 90 secondes (filtre anti bactérien seulement volé sur Apollo XI).
Nombre de repressurisation de la cabine : 4 à 3,3 kg chacune.
Temps de repressurisation cabine : 2 min.
Positionnement des commutateurs de pression cabine :
- lorsque la pression dans la cabine est en baisse de 3,7 à 4,45 psia : contacts fermés.
- lorsque la pression dans la cabine augmente de 4,4 à 5 psia : contacts ouverts.
Capacité du réservoir d'oxygène de l'étage de descente : 21,7 kg à 2730 psia et 21°C (oxygène résiduel : 500 g).
Pression d'éclatement : 4500 psia.
Capacité des réservoirs d'oxygène de l'étage de remontée : 1,100 kg (dans chaque réservoir) à 854 psia et 26,7°C, oxygène résiduel : 63,50 g (chaque réservoir) à 50 psia et 22,1°C.
Pression d'éclatement : 1500 psia.
Soupape de sûreté Bypass :
- pression : 3,03 psig (minimum) à 23,9°C.
- pression de fissuration : 2,875 psig (maximum) à 23,9°C.
- pression : 2,85 psig (minimum) à 23,9°C.
Petit rappel :
PSIA pour pression absolue = l'indication du manomètre affiche la pression atmosphérique en plus de la pression du système où il est branché. Donc le manomètre indiquera environ 15 psia dans l'atmosphère terrestre.
PSIG pour pression indiquée sans tenir compte de la pression atmosphérique environnante. Ce qui veut dire que le manomètre indiquera 0 psi dans l'atmosphère terrestre.
Sources, PDF : LM AGS Flight Equations Narrative Description, Apollo experience report-guidance and control systems : LM Abort Guidance System, Apollo Handbook Lunar Module LM 10 and subsequent Vol 1 subsystems data. Textes de Paul Cultrera, tous droits réservé