LE LRV (LUNAR ROVING VEHICLE ou véhicule itinérant lunaire)
![]()
Fiche d'identité
Nom : Lunar Roving Vehicle (acronyme : LRV ou MLRV pour Manned Lunar Roving Vehicle), également appelé jeep ou rover lunaire.
Fonction : véhicule bi-place destiné à l'exploration de la surface lunaire.
Donneur d'ordres : le gouvernement fédéral américain via la NASA (National Aeronautics and Space Administration).
Constructeur principal : Boeing Co., Aerospace Group, basé au Kent Space Center (près de Seattle), État de Washington.
Nationalité : Américaine.
Masse : 207,29 kg à vide (masse terrestre), 697,17 kg à pleine charge (489,88 kg de charge utile).
Coût du projet : $38 000 000.
Nombre de véhicules construits : 4 de vol (1 pour le vol Apollo XV, 1 pour le vol Apollo XVI, 1 pour le vol Apollo XVII, un qui servit comme pièces de rechange après l'annulation des nouvelles missions Apollo), et 8 véhicules de tests.
Date d'utilisation :
• Première utilisation lors du vol Apollo XV, les 31 juillet, 1er et 2 août 1971.
• Vol Apollo XVI les 21, 22 et 23 avril 1972.
• Enfin, le vol Apollo XVII, les 11, 12, 13 décembre 1972.
Véhicule au design apparemment simple, il est en réalité complexe, et représente également la "voiture" la plus coûteuse de son époque, avec un coût d'environ 9 500 000 $ par unité.
SON RÔLE
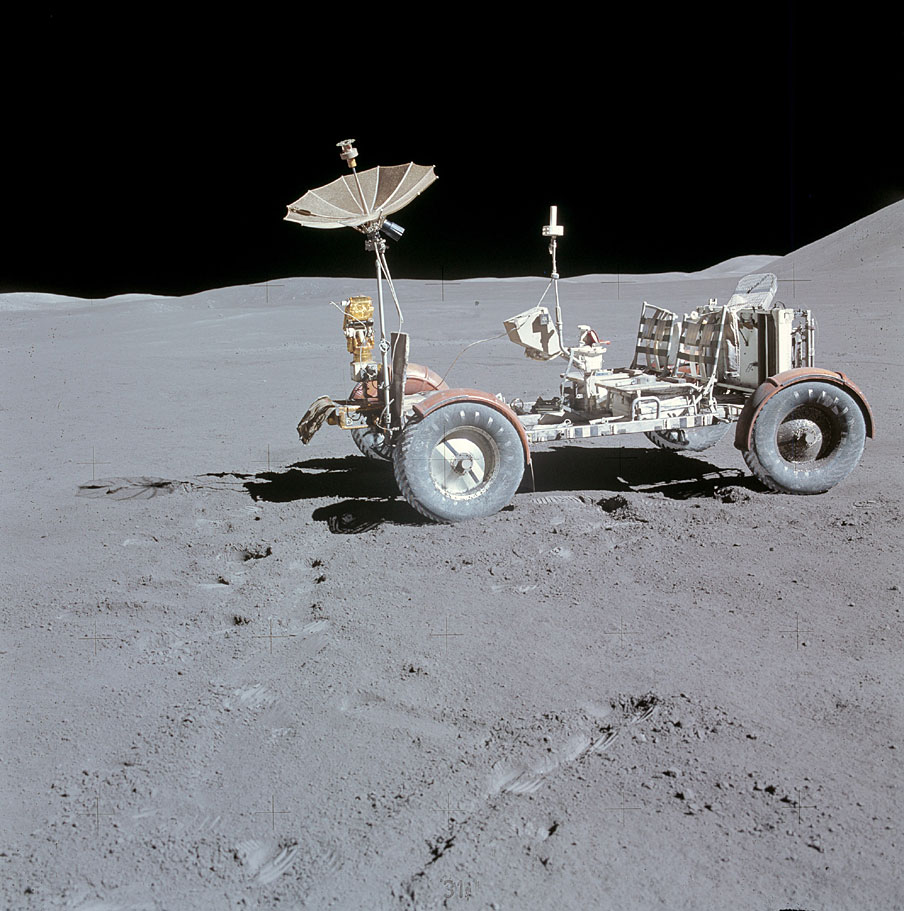
Le LRV, utilisé lors des trois dernières missions Apollo (missions de type J, longue durée), est un véhicule électrique conçu spécifiquement pour fonctionner dans l'environnement lunaire (vide spatial, températures extrêmes, faible gravité). Il permet aux astronautes de parcourir la surface de la Lune, étendant ainsi le champ de leurs activités extravéhiculaires.
SA TECHNOLOGIE
En général :
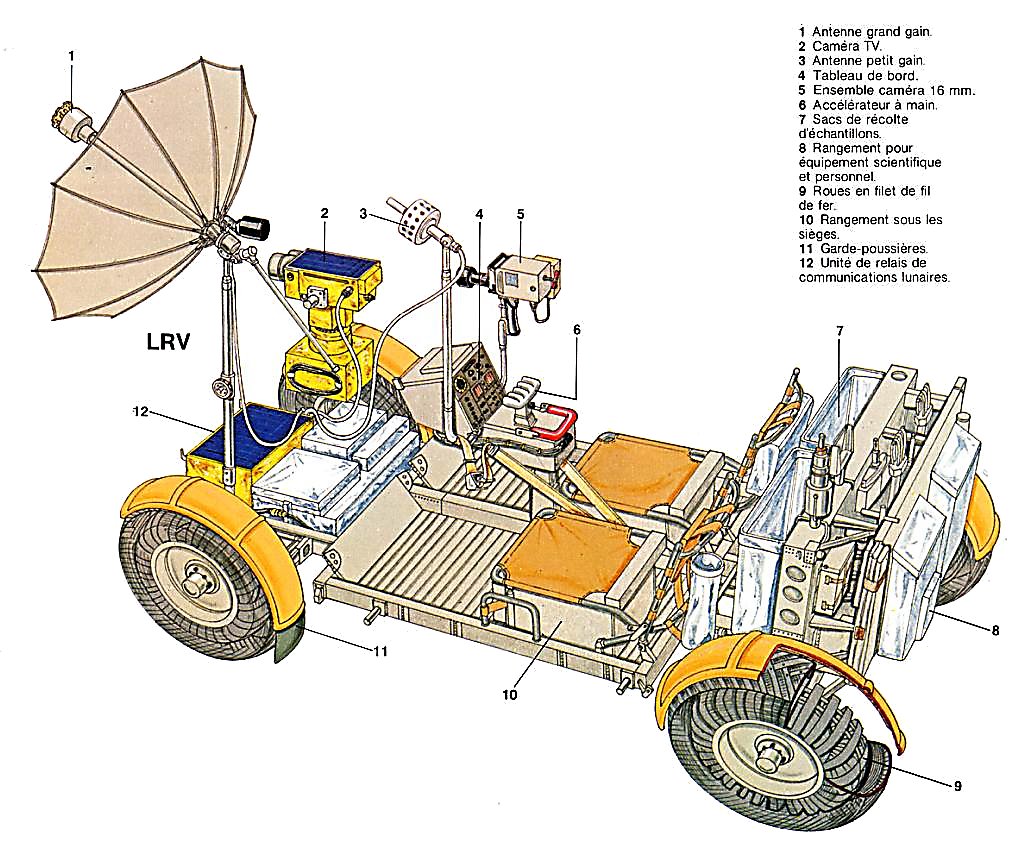
Le LRV est constitué de cinq systèmes principaux : la mobilité, la station d'équipage, la navigation, la puissance électrique, et le contrôle thermique. Les systèmes secondaires incluent le matériel de déploiement, l'équipement de fixation au LM et l'équipement de support au sol.
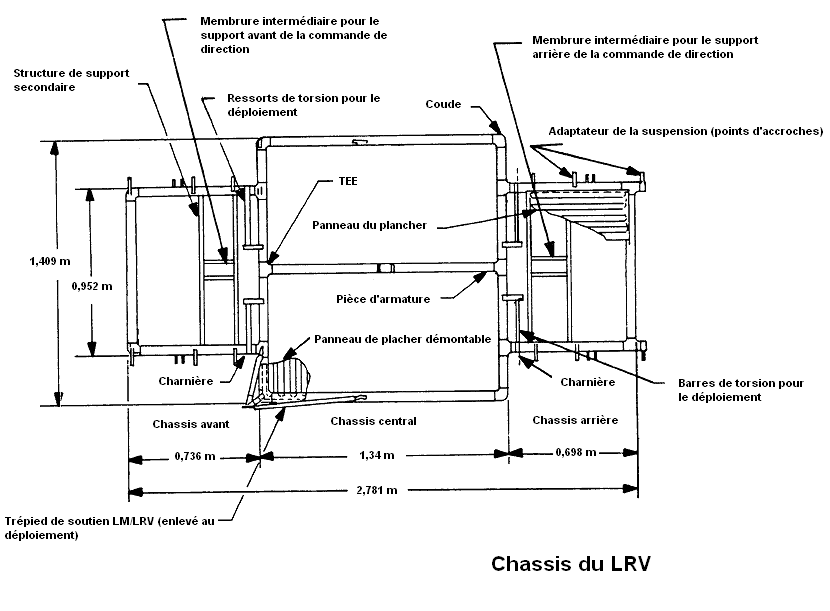
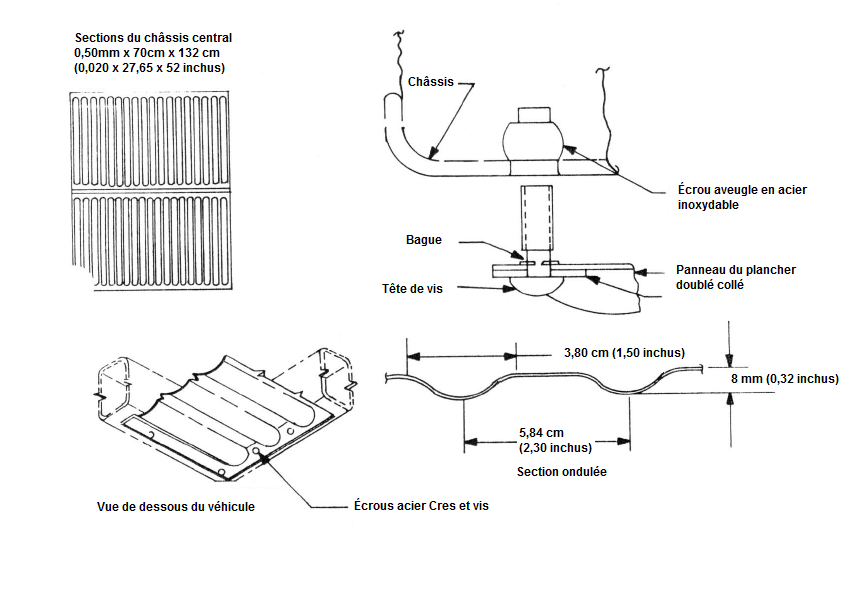
Tout d'abord le châssis. L’armature de celui-ci est réalisée à partir de tubes rectangulaires en aluminium de faible épaisseur, avec des crans dans certaines zones afin de réduire la masse.
Il est divisé en trois sections (avant, centrale, arrière) qui supportent les systèmes et l’ensemble des équipements. Les sections avant et arrière peuvent se replier sur la section centrale pour faciliter le stockage et la fixation sur le quadrant 1 (côté) de l'étage de descente du LM.
• La section avant : elle abrite les deux batteries.
• La section centrale : elle accueille la station d'équipage, avec les deux sièges, la console de commande et de visualisation (tableau de bord) ainsi que son contrôleur manuel.
• La section arrière : elle est dédiée au rangement de la charge utile scientifique.
Système de mobilité
Il s'agit du système principal du LRV, intégrant les roues, la commande de traction, la suspension, la direction ainsi que les sous-ensembles des circuits de commande d’entraînement. Le véhicule ne dispose pas de volant classique : la conduite s’effectue à l’aide d’un manche en forme de T, plus adapté à une utilisation avec des gants pressurisés (la poignée était initialement identique à celle du LM). Ce contrôleur est positionné devant la console de commande et de visualisation, entre les deux membres d’équipage. Il permet de manœuvrer le LRV vers l’avant, l’arrière, à gauche et à droite. Le LRV présente un dégagement au sol de 35,5 cm, un empattement de 2,28 m (90 in) et peut effectuer un virage avec un rayon de braquage de 3,05 m. Il est capable de gravir des pentes jusqu’à 25°, de franchir des obstacles de 30 cm ou des crevasses de 70 cm, et de s’incliner latéralement ou longitudinalement jusqu’à 45° sans basculer.
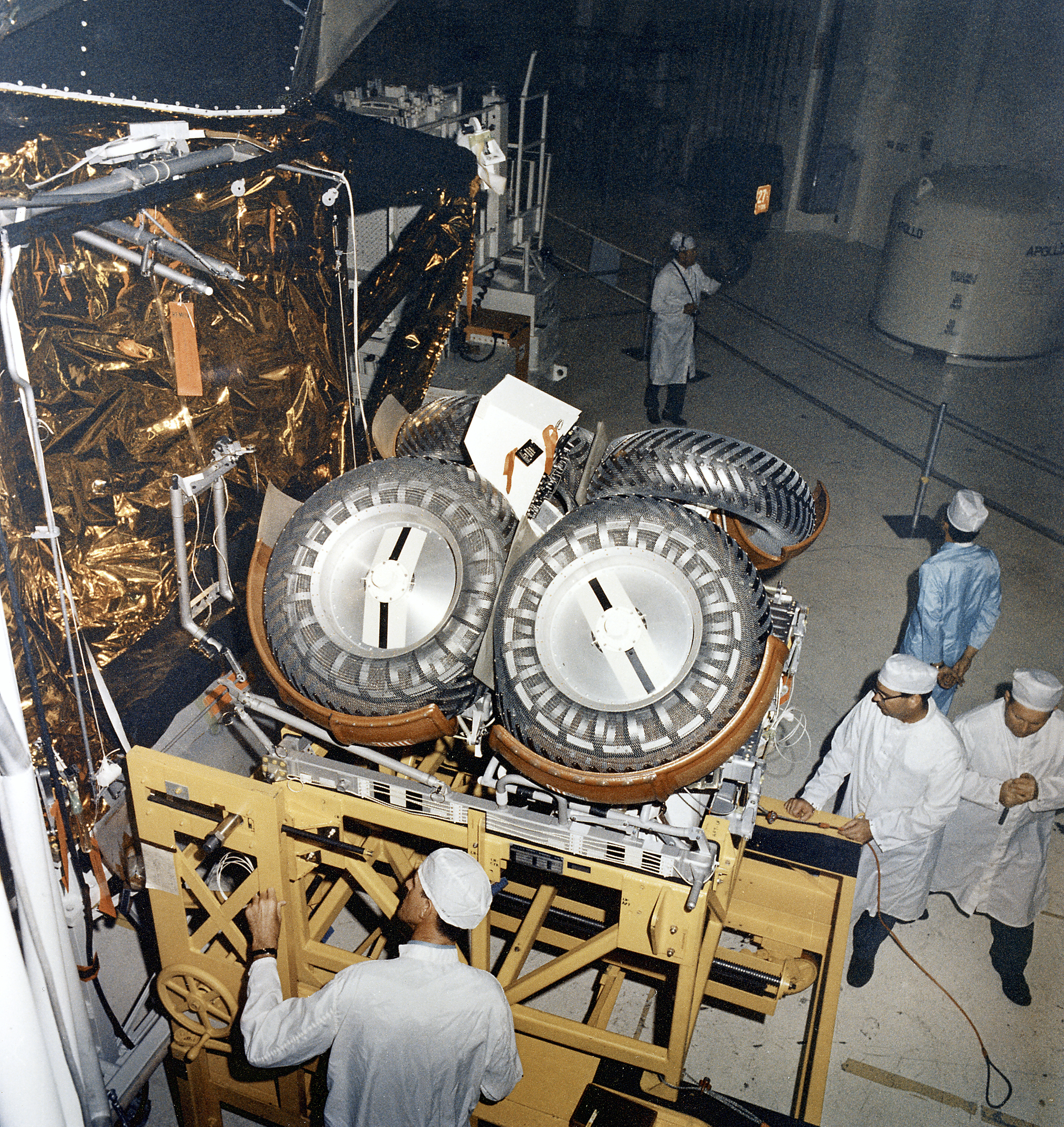
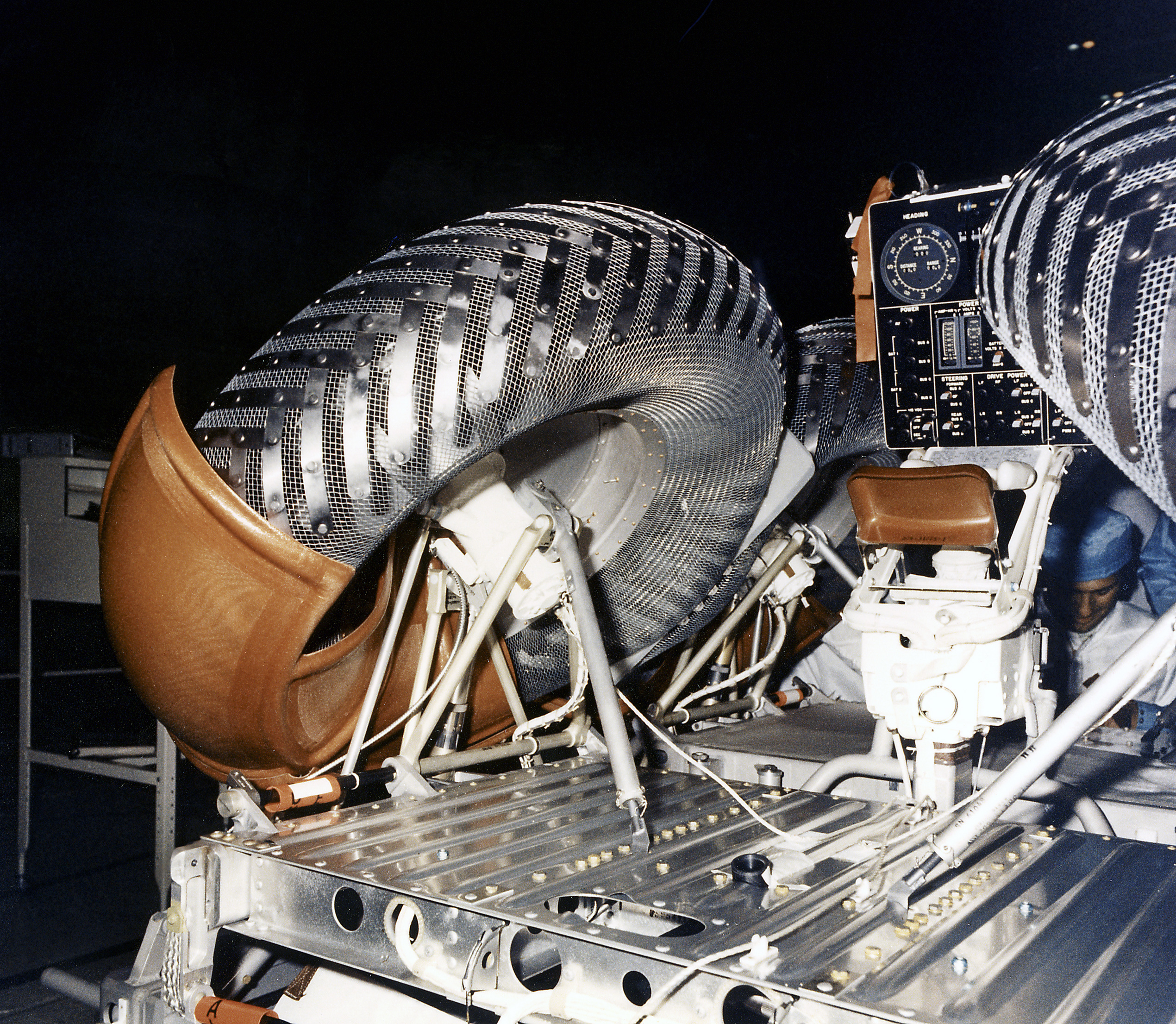
LES ROUES
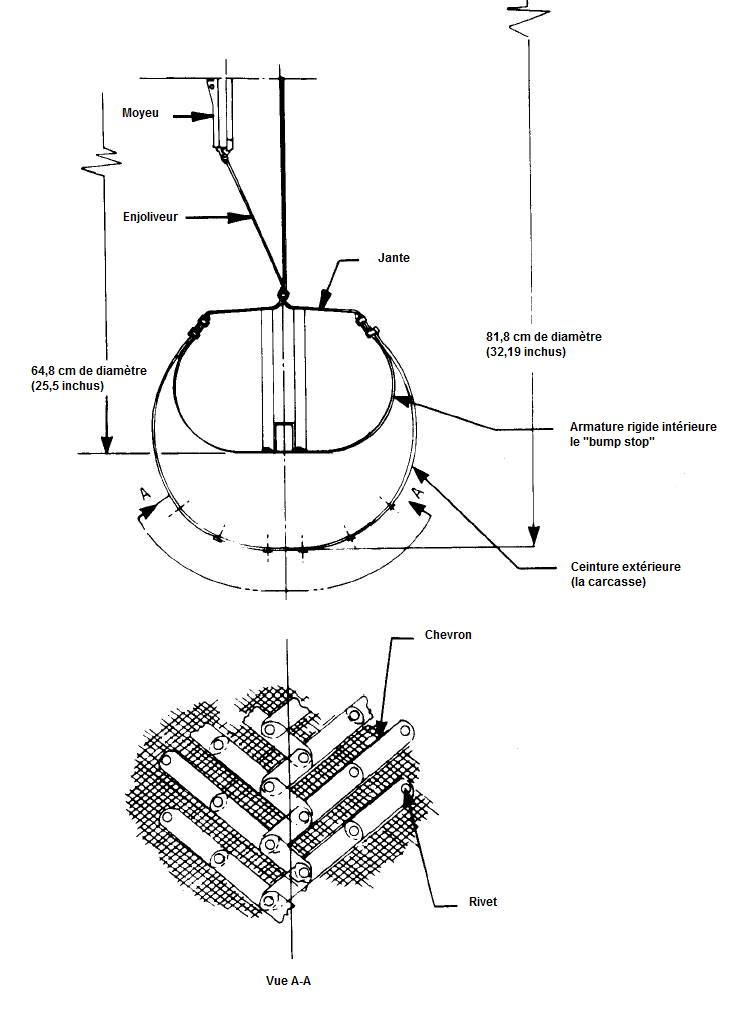
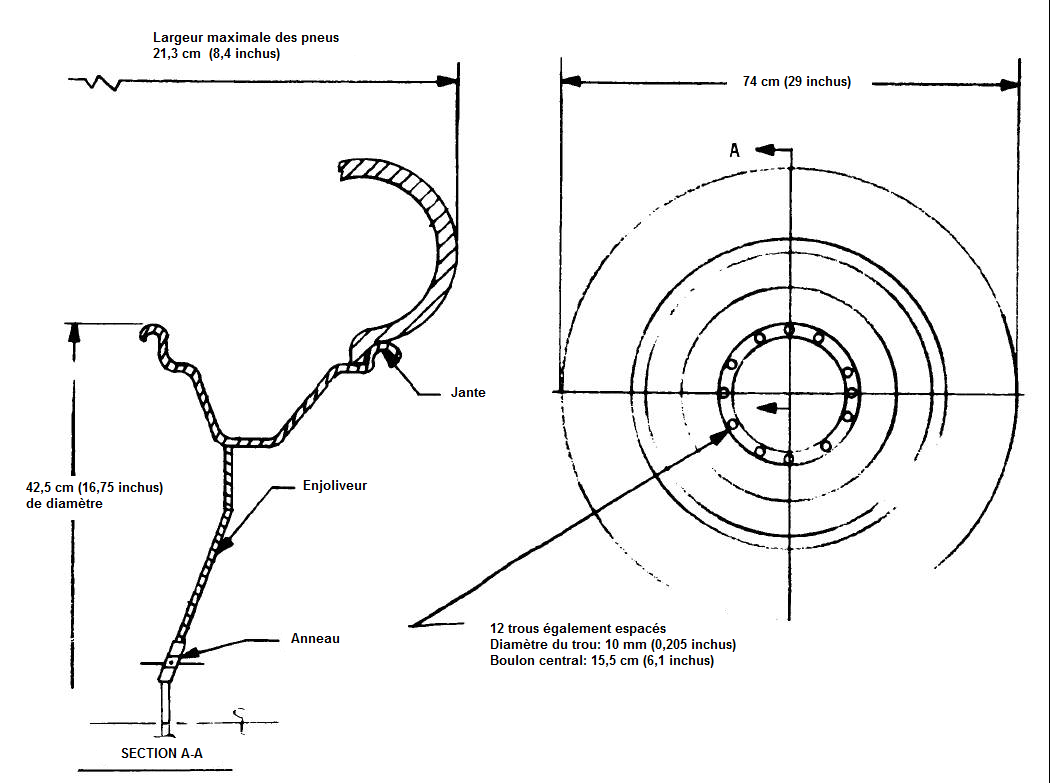
Pour répondre aux contraintes de masse et offrir la mobilité requise sur la surface lunaire, des roues d’un genre inédit ont été développées. En plus de jantes en titane et d’enjoliveurs en aluminium, elles ne comportent pas de pneus conventionnels : leur enveloppe extérieure est constituée d’un treillage métallique.
Séquence vidéo (sans son) sur la fabrication des roues |
Séquence vidéo sur les tests des roues du LRV. |
Cette résille (ou treillage, remplaçant le caoutchouc) forme la carcasse externe, autrement dit la nappe ceinture du pneu proprement dit. Elle est constituée de 800 brins de fil d'acier hypereutectoïde, zingué et tissé à la main. Chaque brin mesure 81,3 cm de long pour un diamètre de 0,8 mm. Ils présentent une ondulation régulière tous les 4,7 mm et sont inspectés par radiographie avant leur montage.
Le saviez vous ?? Les ingénieurs qualifient l’aspect de cette structure de pantographe, en raison de sa ressemblance avec l'instrument de dessin. L’effet visuel est produit par le tissage alterné des fils (dessus, dessous, dessus, dessous..).

Sur cette carcasse sont rivetées des plaquettes en titane qui composent la bande de roulement. Celles-ci dessinent un motif en chevrons couvrant 50 % de la surface de contact afin d’assurer la transmission de l’effort de traction.
À l’intérieur du pneu se trouve une butée (bump stop) : une armature interne rigide en titane de forme annulaire de 64,8 cm de diamètre, qui limite l’enfoncement excessif de la carcasse extérieure en cas de fortes charges d’impact. Cette pièce est positionnée au-dessus de la jante et reliée à celle-ci par 20 bandes cintrées régulièrement réparties, assurant une liaison élastique entre la butée et la jante (voir schéma). En situation d’urgence, lorsque la carcasse externe est fortement endommagée, le véhicule peut poursuivre sa progression en s’appuyant uniquement sur cette structure interne. Chaque pneu est conçu pour fonctionner normalement même si jusqu’à 10 % des fils de la résille sont rompus. Dans ce cas, les fils sectionnés peuvent toutefois constituer un danger potentiel pour un astronaute évoluant à proximité de la roue. L’ensemble, protégé par un enjoliveur en aluminium 2024, préserve le moyeu en aluminium filé lors des franchissements d’irrégularités du terrain. Chaque roue pèsent 5,4 kg sur la Terre et est conçue pour parcourir au moins 180 kilomètres. Elle mesure 81,3 cm de diamètre pour 22,9 cm de large. Le coût unitaire est estimé à 85 000 dollars.
 |
 |
 |
 |
 |
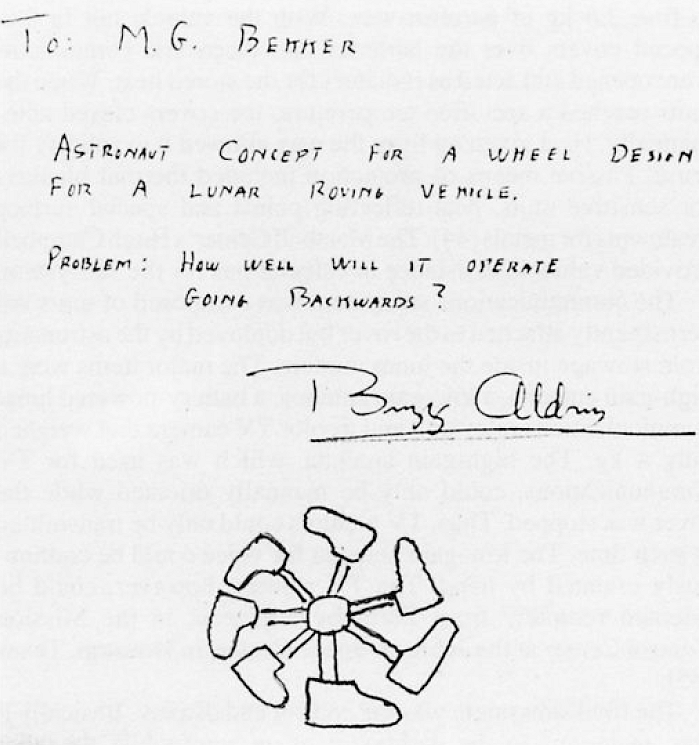 Concept de roue selon Buzz Aldrin à l'attention du docteur M.G. Bekker |
Chaque roue peut également être désaccouplée de son entraînement de traction au moyen de deux mécanismes dédiés, permettant un fonctionnement en roue libre indépendant de la transmission. Dans cette configuration, la roue peut parcourir jusqu’à 100 km sur la surface lunaire et peut ensuite être réaccouplée à l’entraînement. Le désaccouplement entraîne toutefois l’inopérabilité du frein et de l’odomètre associés à la roue concernée. L’opération peut être réalisée à l’aide de l’un des repose-pieds extérieurs du véhicule.
Pour limiter la projection de poussière, des garde-poussière orange sont fixés aux roues afin d’éviter que les astronautes ne soient aspergés par les jets balistiques de régolithe.
Le saviez-vous? Le premier brevet de roue métallique a été déposé en 1858 par un mécanicien anglais, Thomas Rickett.
LA SUSPENSION
Le système de suspension est conçu pour absorber les irrégularités du relief lunaire. Le châssis est suspendu à chaque roue par une paire de bras triangulaires parallèles (suspension à double triangulation) comportant un amortisseur hydraulique à huile de silicone pour limiter les mouvements verticaux. Chaque amortisseur est connecté entre le châssis et le bras de suspension supérieur, et les charges sont transmises au châssis par l'intermédiaire de chaque bras de suspension à une barre de torsion distincte pour chaque bras. Les barres de torsion supérieures servent principalement à déployer les roues à partir de l'état arrimé. Déployées, elles supportent environ 15 % de la charge de chaque roue, tandis que les barres de torsion inférieures supportent les 85 % restants.
Le débattement vertical et la vitesse de déplacement des roues sont limités par un amortisseur linéaire entre le châssis et chaque bras de suspension supérieur, qui limite la course verticale et transfère la chaleur générée à l'huile de silicone (47 cc) puis vers les parois de l'amortisseur pour dissipation. L'amortisseur limite le débattement vertical des roues à 15,2 cm (6 in) de rebond et à 10,2 cm (4 in) de rebond dans des conditions de charge nominales. La déflexion du système de suspension et des pneus permet d'obtenir une garde au sol de 35,6 cm (14 in) lorsque le LRV est entièrement chargé et de 43,2 cm (17 in) lorsqu’il est vide. L’ensemble de la suspension peut pivoter d’environ 135° pour permettre le pliage et le stockage du véhicule dans la structure du module lunaire (LM).
LES MOTEURS
Les quatre roues motrices et directrices 2 à 2 sont actionnées individuellement par un moteur électrique situé dans leur moyeu. Ce moteur à courant continu à balais développe 0,18 kilowatt (1/4 CV) et fonctionne à partir d'une tension d'entrée nominale de 36 V. Chacun est équipé d'un réducteur à engrenage à onde de déformation (harmonic drive) servant d'élément de transmission mécanique et permettant de réduire la vitesse du moteur à un rapport de 1/80 pour un fonctionnement continu à toutes les vitesses, sans changement de mécanisme. La transmission est lubrifié avec de l'huile Krytox 143AZ. La régulation de la vitesse des moteurs est assurée par la modulation de largeur d'impulsion à partir du boîtier électronique du régulateur d'entrainement.
Chaque moteur est instrumenté pour la surveillance thermique. Une sortie de température analogique provenant d'une thermistance située dans l'enroulement de champ est transmise pour être affichée sur le panneau de commande et d'affichage. En outre, chaque moteur est équipé d'un interrupteur thermique qui se ferme en cas de température excessive, fournissant ainsi un signal d’entrée au système d’avertissement et de mise en garde pour actionner le drapeau d’avertissement. Si nécessaire, un des moteurs peut être débrayé manuellement, laissant la roue libre.
Chaque unité de traction est équipée d'un frein mécanique actionné par un câble relié à une tringlerie dans la commande manuelle. Le freinage s'effectue lorsque le LRV est en marche avant ou arrière, en tirant la dite commande vers l'arrière autour du point de pivot du frein. Les freins sont effectivement verrouillés lorsque l'angle atteint 12°. L'inhibition de la puissance motrice est actionnée par un interrupteur à 15°. Le découplage d'une roue entraîne également le découplage du frein de cette roue.
Chaque unité de traction (traction drive) est également équipée d’un odomètre intégré fournissant des impulsions pour le système de navigation, et l’ensemble de l’unité est scellé hermétiquement à environ 7,5 PSIA afin de protéger les engrenages et les balais dans le vide lunaire.
LA DIRECTION
La direction du LRV est assurée par un système à géométrie Ackermann pour les roues avant et arrière, ce qui permet un rayon de braquage très court de 3,10 m (122 in). Le déplacement de la commande manuelle vers la gauche ou la droite alimente des moteurs électriques distincts pour les roues avant et arrière et fournit, par l’intermédiaire d’un servo-système, un angle de braquage proportionnel à la position de la commande.
Chaque moteur de direction est couplé à un réducteur de vitesse qui entraîne un engrenage sectoriel droit. Celui-ci actionne à son tour la tringlerie de direction pour produire le changement d’angle des roues. La course maximale du secteur permet d’obtenir un angle de 22° pour la roue extérieure et de 50° pour la roue intérieure. La vitesse de braquage est telle que le passage du blocage à droite au blocage à gauche peut être effectué en environ 5 s.
Les ensembles de direction avant et arrière sont mécaniquement indépendantss. Si une seule direction Ackermann est souhaitée, ou en cas de panne d’un moteur ou d’un réducteur de vitesse, la tringlerie de direction peut être désengagée d’un secteur. Les roues peuvent peuvent alors être recentrées et verrouillées manuellement, et les opérations peuvent se poursuivre en utilisant l’ensemble de direction encore actif. Le réengagement de la direction avant ne peut pas être réalisé par un membre d’équipage. La direction arrière, quant à elle, peut être réengagée à l’aide d’un outil spécial rangé sur le châssis arrière, conçu pour escamoter la goupille de verrouillage du secteur de direction.
DIRECTION ÉLECTRIQUE
Le système électrique de direction est un servosystème. Un signal généré par la déviation de la commande manuelle est couplé au servoamplificateur d'entrée en tant que signal d'erreur via un pont. Ce signal d'erreur est amplifié et appliqué aux bobines de champ du moteur de direction dans une orientation déterminée par la polarité du signal d'erreur d'entrée, elle même fonction du sens de déviation de la commande manuelle. Le pont de rétroaction est entraîné par le moteur de direction jusqu'à ce que sa position annule précisément le signal d'erreur d'entrée initial en équilibrant le pont. Le déplacement angulaire des roues reste alors constant tant que le contrôleur manuel n’est pas déplacé vers une nouvelle position.
Les deux moteurs de direction sont alimentés par des disjoncteurs distincts, reliés à des bus électriques sélectionnables, afin d’assurer la redondance.
La direction Ackermann simple peut être sélectionnée en centrant les roues, puis en coupant l’alimentation électrique de la direction avant ou arrière. Cette procédure peut nécessiter un recentrage ponctuel de la direction désactivée, en activant brièvement sa puissance d’entraînement avec la commande manuelle en position centrale.
LE SOUS-SYSTÈME ÉLECTRIQUE DU LRV
Il comprend deux batteries, des câbles de distribution, des connecteurs, des interrupteurs, des disjoncteurs, ainsi que des compteurs destinés au contrôle et à la surveillance de l’énergie électrique.
LES BATTERIES
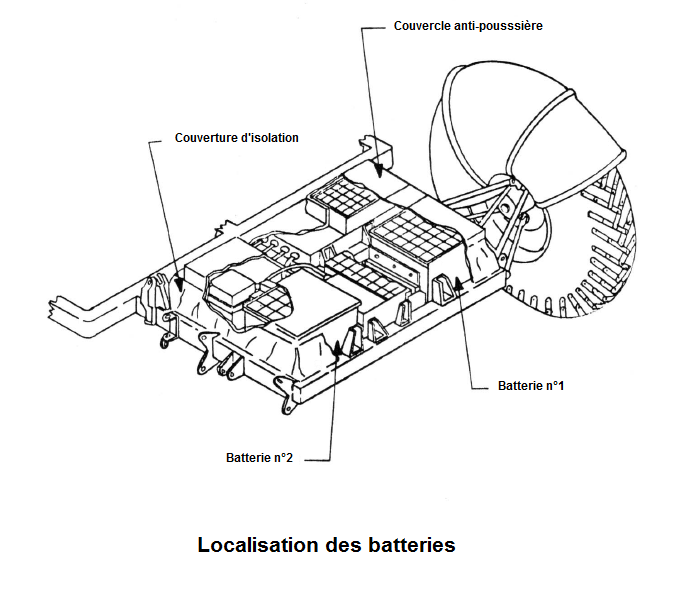
Le Lunar Roving Vehicle (LRV) est équipé d’un sous-système de puissance électrique entièrement autonome, basé sur deux batteries principales argent‑zinc, chacune délivrant une tension nominale de 36 V (+5 / −3 V) et une capacité de 115 ampères‑heures. Ces batteries non rechargeables, à structure cellulaire en plexiglas, sont installées dans la partie avant du châssis. Le couple électrochimique argent‑zinc fonctionne dans un électrolyte composé d’hydroxyde de potassium et d’eau. Chaque batterie comprend 23 cellules et pèse 26,76 kg. Elles sont placées dans des compartiments en magnésium, protégées par une couverture thermique et recouvertes d’un capot anti-poussière.
Les deux batteries sont généralement utilisées simultanément, avec une répartition approximative de la charge grâce à la sélection de différentes combinaisons de connexion au bus, effectuée via les disjoncteurs et les réglages de la console de contrôle et d’affichage. Chaque batterie est capable de fournir seule l’ensemble de la charge électrique du LRV en cas de panne de l’autre, assurant ainsi une redondance complète du système.
Chaque batterie est également intégrée thermiquement aux unités de navigation :
• La batterie n°1 (à gauche) est thermiquement couplée à l’unité de traitement des signaux de navigation (SPU – Navigation Signal Processing Unit) et joue un rôle partiel de radiateur.
• La batterie n°2 (à droite) est thermiquement connectée à l’unité gyro‑directionnelle de navigation (DGU – Navigation Directional Gyro Unit), à laquelle elle sert de dissipateur thermique.
Les valeurs de tension, courant de sortie et température des batteries peuvent être surveillées via la console de contrôle et d’affichage, afin de garantir un fonctionnement sûr tout au long de la mission. Pour la sécurité interne, chaque batterie est protégée contre une surpression grâce à une soupape calibrée pour s’ouvrir entre 3,1 et 7 PSI, ce qui permet de relâcher la pression interne et de prévenir tout dommage structurel ou électrochimique.
 |
 |
Les batteries sont installées dans le LRV en configuration opérationnelle sur l’aire de lancement. Leur tension et leur température sont surveillées jusqu’à environ T-18 heures dans le compte à rebours. Une fois sur la surface lunaire, la surveillance porte sur la tension, la température, le courant de sortie et les ampères-heures restants. Ces données sont affichées sur le panneau de commande et d’affichage. Les batteries sont fabriquées par Eagle-Picher Industries, Division électronique, à Joplin (Missouri).
L’énergie fournie par les deux batteries principales argent-zinc du LRV est distribuée via un bus 36 VDC principal vers tous les sous-systèmes du véhicule, incluant les moteurs de traction des quatre roues, les moteurs de direction, les circuits électroniques de navigation et d’instrumentation, ainsi que les prises utilitaires pour équipements auxiliaires. La distribution passe par des interrupteurs et disjoncteurs situés sur la console de contrôle et d’affichage, permettant de connecter ou isoler des charges selon les besoins et de protéger le système contre les surcharges. Les câbles et connecteurs sont dimensionnés pour supporter les charges variables tout en tenant compte des contraintes de gravité lunaire et thermiques. Le système est conçu de manière à ce que n’importe quelle charge puisse être alimentée par l’une ou l’autre des batteries, assurant ainsi une redondance complète en cas de panne. Certaines charges non critiques, telles que les circuits auxiliaires, peuvent être déconnectées pour économiser l’énergie lors d’arrêts prolongés, tandis que les systèmes de navigation restent toujours alimentés.
Les batteries et le bus principal sont surveillés en continu depuis la console de contrôle et d’affichage, où les astronautes peuvent visualiser les paramètres électriques essentiels, notamment la tension, le courant de sortie, la température et la capacité restante de chaque batterie, garantissant un fonctionnement sûr tout au long de la mission. La console, thermiquement isolée et ergonomiquement conçue, permet un accès simultané depuis les deux postes de l’équipage. Les marquages luminescents au Prométhium‑147 assurent une lecture facile même dans l’ombre. Des schémas et repères standardisés sur la console facilitent l’interprétation rapide des instruments et la prise de décision en situation opérationnelle ou d’urgence.
LA STATION D'ÉQUIPAGE
Elle comprend les sièges, les repose-pieds, les poignées intérieures et extérieures, le repose-bras, les panneaux du plancher, les ceintures de sécurité, les garde-poussière et les prises.
Les sièges : ce sont des cadres tubulaires (tube rond) en aluminium recouverts d'une toile en nylon. Ils sont positionnés à plat sur le châssis central pour le lancement et érigés dans leur position opérationnelle par l'équipage après le déploiement du LRV sur la surface lunaire. Le dossier du siège sert d’appui et de retenue latérale du PLSS. Le bas du siège comporte une découpe pour permettre l'accès aux valves de contrôle de flux du PLSS, ainsi que des dispositifs de support vertical. Un espace de rangement est prévu sous chaque siège.
Un espace de rangement est prévu sous chaque siège, pouvant accueillir des sacs ou équipements légers (stowage bags).
Les repose-pieds : stockés sur le plancher du châssis central et maintenus par deux sangles en velcro, ils sont ajustés avant le lancement selon la taille de chaque membre d’équipage et déployés une fois sur la surface lunaire.
Les poignées intérieures : réalisées en tube d'aluminium, elles permettent d’aider l’équipage à monter et descendre du véhicule. Elles servent également de point d’attache pour les réceptacles de la caméra 16 mm destinée à l’acquisition de données et pour l’antenne LCRU à faible gain.
Les poignées extérieures : intégrées au châssis, elles assurent la stabilité et le confort des astronautes lorsqu’ils sont assis, et permettent la fixation des ceintures de sécurité.
Le repose-bras : il sert de support pendant la conduite avec le manche en T.
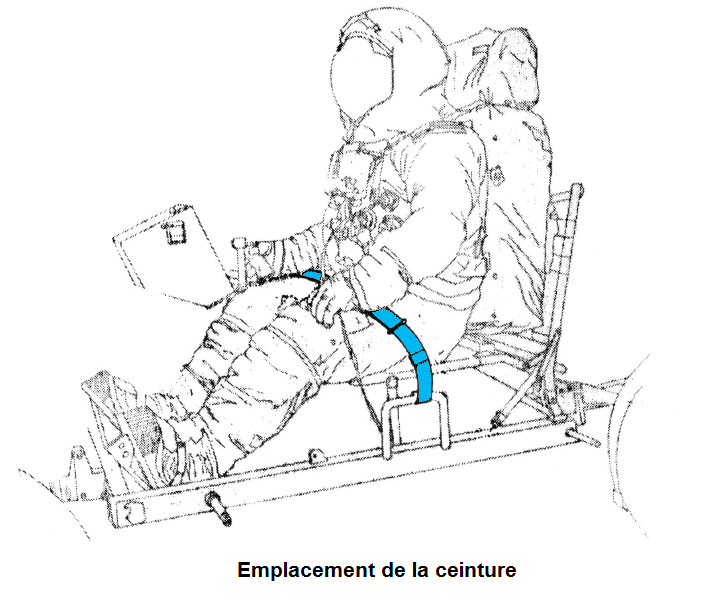
Les ceintures de sécurité : présentes sur chaque siège, elles sont fabriquées en sangle de nylon. Leur extrémité est équipée d’un crochet fixé à la poignée extérieure. La longueur est ajustée par une boucle, et une portion permet l’accrochage et le décrochage normal de la ceinture.
Les "garde-poussière" : la partie déployable de chaque garde-poussière est positionnée manuellement par un astronaute lors du déploiement du LRV.
Les prises : au nombre de deux, une de chaque côté du véhicule, elles assistent l'équipage pour s’installer ou descendre du LRV. Elles correspondent aux « toeholds » des manuels NASA, insérées dans des réceptacles du châssis pour former les points de support opérationnels.
Les panneaux du plancher : situés dans la zone de la station d’équipage, ils sont en aluminium ondulé et dimensionnés pour supporter la masse totale des astronautes en gravité lunaire.
LE CONTRÔLE THERMIQUE
Le contrôle thermique du Lunar Roving Vehicle (LRV) combine des moyens passifs et actifs destinés à dissiper l’excès de chaleur produit par les équipements situés à l’avant du châssis, à maintenir les conditions de fonctionnement des instruments de la console de contrôle et d’affichage (Control and Display Console, CDC), ainsi qu’à évacuer la chaleur générée au niveau de la station d’équipage. Il repose sur l’utilisation de revêtements et d’isolants thermiques, de surfaces radiantes, de miroirs thermiques, de ponts thermiques et de blocs de paraffine jouant le rôle de puits de chaleur. L’ensemble du système est conçu pour maintenir tous les composants sensibles dans leurs limites thermiques opérationnelles, y compris durant les périodes d’inactivité et d’exposition prolongée au Soleil lunaire. Un indicateur visuel permet de signaler une température excessive des batteries ou des moteurs.
• Le contrôle thermique de la partie avant du châssis est assuré par des couvertures thermiques multicouches, des miroirs thermiques, des ponts thermiques en aluminium, des blocs de paraffine servant de puits de chaleur et des couvercles anti-poussière. Ces dispositifs protègent de la surchauffe les principaux composants sensibles, à savoir l’électronique de commande de conduite (Drive Control Electronics, DCE), l’unité de traitement des signaux de navigation (Signal Processing Unit, SPU), le gyroscope directionnel de navigation (Directional Gyro Unit, DGU), ainsi que les batteries n° 1 et n° 2. Les couvertures thermiques sont constituées de quinze couches de mylar aluminisé séparées par quatorze couches de filet en nylon, avec une couche externe en tissu Bêta. Les ponts thermiques en aluminium assurent le transfert de la chaleur produite par le DCE, le SPU et le DGU vers les batteries ou vers les blocs de paraffine, où cette chaleur est temporairement stockée.
Deux compartiments distincts contiennent la paraffine. En fonctionnement, la chaleur générée par les équipements provoque la fusion de la paraffine, qui absorbe l’énergie thermique tout en maintenant une température relativement stable. À l’arrêt, les astronautes ouvrent les couvercles des radiateurs, permettant à la chaleur accumulée d’être évacuée par rayonnement vers l’espace pendant que la paraffine se solidifie, ce qui rend le système de nouveau opérationnel pour une utilisation ultérieure. Les radiateurs ne sont exposés qu’entre deux sorties extravéhiculaires et ne le sont jamais lorsque le rover est en mouvement, afin de limiter la contamination par le régolithe lunaire.
Des miroirs thermiques en silice fondue sont disposés au-dessus des batteries n° 1 et n° 2, du SPU et du DCE. Ils facilitent l’évacuation de la chaleur provenant des batteries et des puits de chaleur lorsque les couvercles des radiateurs sont ouverts. Les couvercles anti-poussière, réalisés en fibre de verre et situés au-dessus des deux batteries et du SPU, sont ouverts manuellement par l’équipage et se referment automatiquement grâce à un vérin bimétallique. Le couvercle du SPU est mécaniquement couplé à celui de la batterie n° 1, de sorte que les deux s’ouvrent et se ferment simultanément.
• Le contrôle thermique du châssis central est obtenu par l’anodisation des accessoires qui le composent, notamment les poignées, les repose-pieds, les sections tubulaires des sièges ainsi que les panneaux centraux et arrière du plancher. Les instruments de la console de contrôle et d’affichage sont montés sur une plaque en aluminium, elle-même isolée du reste du véhicule par des supports en fibre de verre. Les surfaces externes de la console sont recouvertes d’une peinture thermorésistante de type Dow-Corning 92-007, tandis que la plaque frontale reçoit un traitement anodisé noir permettant à la fois de limiter les reflets gênants pour les astronautes et de contribuer à la régulation thermique.
La chaleur produite par les ensembles d’entraînement par traction et par les amortisseurs linéaires est dissipée par rayonnement thermique vers l’espace, respectivement à travers le disque de moyeu et le carter. Le gaz pressurisé contenu dans chaque ensemble d’entraînement participe également à cette dissipation thermique. Toutes les surfaces exposées sont conçues de manière à maximiser l’émission thermique tout en limitant l’accumulation de poussière lunaire, assurant ainsi le maintien des performances thermiques du LRV dans l’environnement lunaire.
PRÉSENTATION DE LA CONSOLE D'AFFICHAGE ET DE CONTRÔLE
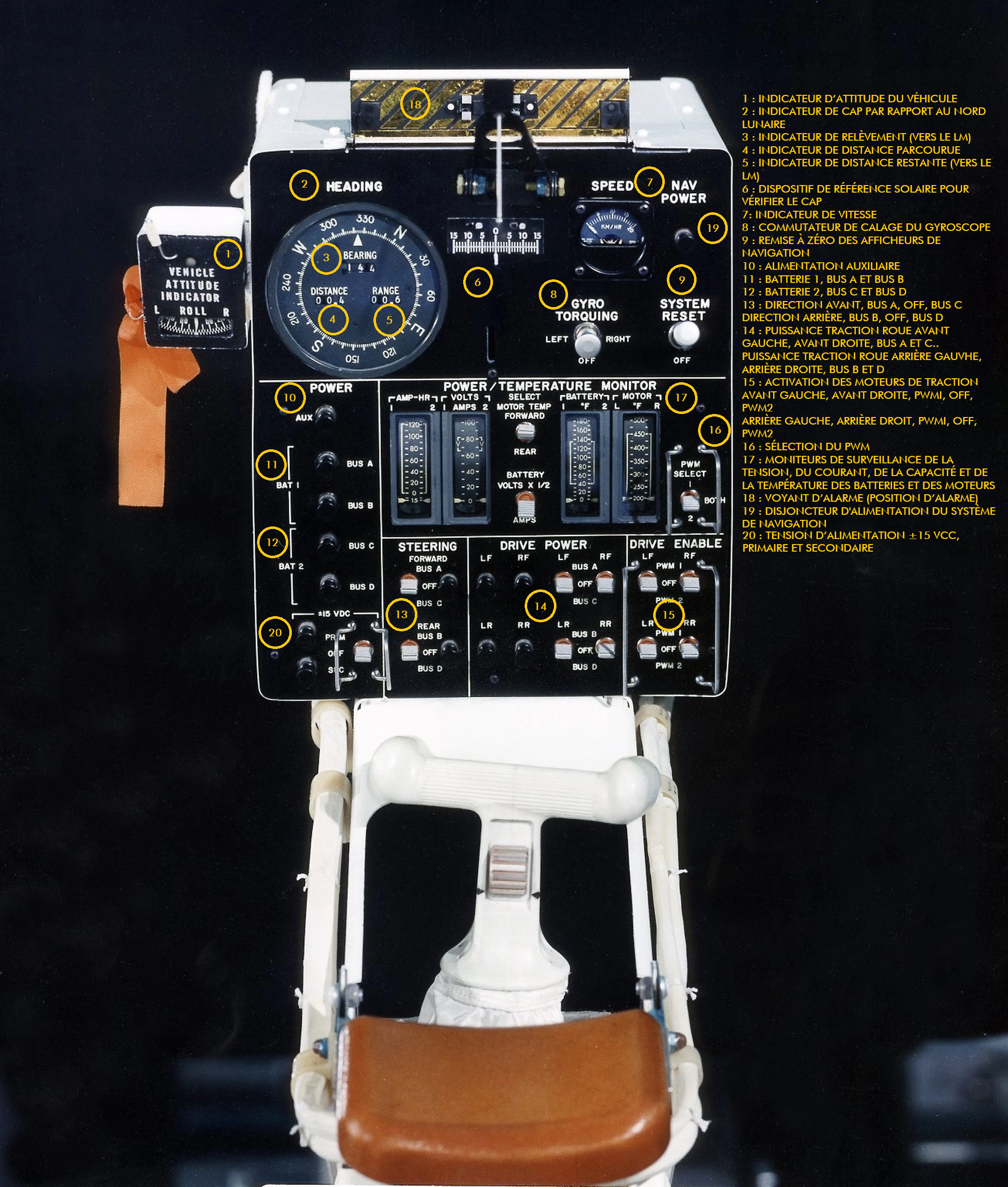
La console de contrôle et d’affichage (Control and Display Console) du Lunar Roving Vehicle (LRV) regroupe l’ensemble des instruments et commandes nécessaires à la navigation et à la gestion des systèmes du véhicule. Elle est divisée en deux parties fonctionnelles principales : la section supérieure est dédiée aux instruments du système de navigation, tandis que la section inférieure rassemble les commandes de surveillance et de contrôle des charges électriques.
Pour garantir une lecture aisée même dans l’ombre, les marquages des instruments et interrupteurs sont luminescents grâce à une irradiation au Prométhium‑147, assurant leur visibilité dans des conditions de faible luminosité. Toutes les commandes et interrupteurs sont conçus pour être manipulables par des membres d’équipage portant des gants pressurisés, avec des marges de sécurité adaptées à la gravité lunaire. L’ensemble de la console est isolé thermiquement afin de limiter les variations de température susceptibles d’affecter la précision des instruments.
La console est ergonomiquement disposée pour permettre un accès simultané depuis les deux postes de l’équipage, permettant à chaque astronaute de lire et manipuler les commandes depuis son siège. Des schémas et repères standardisés facilitent l’interprétation rapide des instruments et la prise de décision en situation opérationnelle ou d’urgence. Elle comporte également un tableau complet de voyants lumineux et d’interrupteurs, chacun identifié par un marquage spécifique et relié à un sous-système précis (navigation, énergie électrique, avertissements de panne). Les voyants indiquent l’état opérationnel ou critique du sous-système correspondant, tandis que les interrupteurs permettent une action manuelle rapide si nécessaire.
LE SOUS-SYSTÈME DE NAVIGATION
Le système de navigation du Lunar Roving Vehicle (LRV) est conçu pour fournir aux astronautes toutes les informations nécessaires pour se repérer et se déplacer sur la surface lunaire en toute sécurité. Il repose sur la navigation inertielle et odométrique, combinant un gyroscope directionnel (directional gyro), des odomètres montés sur les roues (wheel odometers), une unité de traitement de signal (Signal Processing Unit, SPU) et un dispositif d’ombre solaire (Sun‑shadow Device). Les données traitées par ce système sont affichées sur la console de contrôle et d’affichage.
Le gyroscope directionnel fournit une référence de cap par rapport au nord lunaire et constitue la source principale de direction pour le rover. Il est aligné et torqué avant chaque sortie en utilisant des références visuelles telles que l’attitude du rover et le dispositif d’ombre solaire, afin d’assurer la précision du point de départ.
L’indicateur d’attitude (Attitude Indicator, AI), situé dans le coin supérieur gauche de la console, affiche le tangage (pitch) et le roulis (roll) du véhicule dans une plage de ±25°. Il indique le tangage en montée (U) ou en descente (D) par incréments de 5° et le roulis de 25° à gauche à 25° à droite par incréments d’un degré. Un amortisseur latéral peut être relevé pour atténuer les oscillations. L’indication de tangage reste lisible même lorsque l’instrument est en position repliée, et la rotation de l’indicateur expose l’échelle de roulis pour le membre d’équipage situé à gauche. Les lectures de tangage et de roulis sont transmises au Command and Control (CC) pour la mise à jour des calculs de navigation et permettent de maintenir un cap stable ainsi que de vérifier l’horizontalité du rover lors des déplacements.
Les odomètres des roues enregistrent la distance parcourue. Quatre odomètres sont utilisés, la lecture de la troisième roue la plus rapide étant prise en compte pour minimiser les erreurs dues à une roue bloquée ou patinant. Les signaux des odomètres sont transmis à l’unité de traitement de signal (SPU), qui calcule en temps réel la distance totale parcourue (Distance Indicator), la distance restante vers le LM (Range Indicator), le cap vers le LM (Bearing Indicator) et la vitesse instantanée (Speed Indicator). L’odomètre de la roue arrière droite alimente spécifiquement l’indicateur de vitesse. En cas de coupure de courant, les valeurs affichées au moment de la perte d’alimentation restent visibles jusqu’au rétablissement de l’alimentation.
Le dispositif d’ombre solaire est un instrument manuel qui projette une ombre sur une échelle graduée pour déterminer l’orientation du rover par rapport à l’azimut solaire. Il permet de vérifier et recalibrer le gyroscope si nécessaire et peut être utilisé avec des angles d’élévation solaire allant jusqu’à 75°. Le point d’intersection de l’ombre avec l’échelle est transmis au Mission Control Center (MCC) pour la mise à jour des calculs de navigation.
Les instruments de navigation affichés sur la console comprennent donc :
Heading Indicator : orientation du rover par rapport au nord lunaire ;
Bearing Indicator : cap vers le LM ;
Distance Indicator : distance parcourue depuis le départ par incréments de 0,1 km (capacité totale 99,9 km) ;
Range Indicator : distance restante vers le LM, même graduation et capacité ;
Speed Indicator : vitesse du rover de 0 à 20 km/h ;
Sun‑shadow Device : référence solaire pour le cap.
L’ensemble du système fonctionne de manière autonome, combinant gyroscope, odométrie et références solaires, avec traitement et affichage en temps réel sur la console, assurant une navigation précise et fiable sur la surface lunaire.
LA MANETTE DE COMMANDE /CONDUITE (HAND CONTROLLER)
Le hand controller du Lunar Roving Vehicle (LRV), appelé manette de conduite, constitue l’interface principale de pilotage manuel du véhicule. Il permet aux astronautes de contrôler la direction, la vitesse et le freinage. La manette transmet ces commandes aux Drive Controller Electronics, qui traitent les signaux reçus pour alimenter les moteurs de traction et les moteurs de direction, effectuant ainsi la fonction de contrôle désirée. La manette sert également de levier de freinage mécanique.
La manette est située entre les deux sièges de l’équipage, accessible à chacun des astronautes, et conçue pour être manipulée avec les gants pressurisés. Son fonctionnement repose sur une poignée en T (T-handle) qui pivote dans différentes directions : l’inclinaison vers l’avant augmente la vitesse en marche avant, l’inclinaison vers l’arrière augmente la vitesse en marche arrière et applique la force de freinage proportionnelle au déplacement arrière. Une inclinaison vers la gauche ou la droite augmente respectivement l’angle de braquage dans la direction correspondante. Le déplacement maximal vers l’arrière (environ 3 in ou 7,62 cm) active le frein de stationnement, et le déplacement de la poignée à environ 15° arrière désactive le contrôle de l’accélérateur.
Le hand controller possède des ressorts et butées mécaniques qui assurent un retour automatique à la position neutre lorsqu’aucune force n’est appliquée. Cette conception garantit un contrôle stable et proportionnel de la vitesse et de la direction, limitant les oscillations involontaires du véhicule.
La manette envoie donc des commandes électriques proportionnelles à la Drive Controller Electronics, qui les traduisent en signaux adaptés aux moteurs de traction et de direction. Cette architecture permet un contrôle fin et progressif du véhicule, tout en garantissant une sécurité maximale grâce au système de freinage intégré. Le design ergonomique assure que toutes les fonctions essentielles – pilotage, freinage et ajustement de vitesse – restent accessibles même en portant des gants pressurisés, et que les deux membres d’équipage peuvent utiliser la manette selon leur position dans le LRV.
Le déplacement arrière de la poignée augmente progressivement la force de freinage proportionnelle à la distance, jusqu’au frein de stationnement. Le freinage peut donc être appliqué de façon continue et ajustée, ce qui permet une gestion précise de l’arrêt du LRV, y compris sur des pentes ou sols irréguliers.
CONTRAINTES DE MASSE ET DE VOLUME IMPOSÉES PAR L'INTÉGRATION AU LM
L’un des principaux choix de conception du LRV concernait son mode d’arrimage dans le LM et son déploiement à la surface lunaire. Les spécifications de conception imposaient que le LRV soit replié à 50 % de sa longueur initiale et 70 % de sa largeur initiale, tout en conservant des capacités de déploiement nécessitant un effort minimal de la part des astronautes à la surface lunaire.
PLIAGE ET ARRIMAGE
Le LRV est arrimé dans le LM en configuration repliée, dans une enveloppe d'encombrement de forme triangulaire de 1,78 m de largeur, 1,65 m de hauteur et 0,94 m de profondeur. Le LRV est fixé dans cette baie en trois points d’ancrage structurels et positionné par des tripodes montés à l’avant du châssis central du LRV, ainsi que par un tube de support reliant la baie à l’arrière du châssis central. Les tripodes sont largués après le déploiement.
EXIGENCES DE DÉPLOIEMENT
Les exigences suivantes s’appliquent au déploiement du LRV à la surface lunaire.
Il doit être possible de déployer le LRV lorsque le LM se trouve dans n’importe quelle attitude comprise dans ±14,5° par rapport à la verticale, sur une pente lunaire maximale de 6°, et avec les points d’ancrage inférieurs de la baie du LM situés entre 0,356 m et 1,58 m au-dessus de la surface lunaire.
La condition la plus défavorable se produit lorsqu’un des pieds du LM se trouve dans un trou de 0,61 m de profondeur.
Il doit être possible de déployer le LRV entre deux pieds adjacents du LM, à l’intérieur d’une enveloppe au sol spécifiée garantissant un dégagement suffisant pour les astronautes entre le LRV et les pieds du LM lors de la séparation du véhicule.
Il doit être possible de déployer le LRV par un équipage de deux personnes, avec un effort minimal, sous contrôle permanent, et en moins de 15 minutes.
Les limitations suivantes ont été imposées aux mouvements requis d’un astronaute en tenue pressurisée :
• mouvements des bras : une traction alternée main sur main est préférable à la rotation d’une manivelle ou à une action de poussée ;
• capacité de préhension d’une main gantée.
• La force de traction maximale qu’un astronaute peut exercer en position libre sur la surface lunaire est limitée à 120 newtons (27 livres-force).
MATÉRIEL DE FIXATION AU LM ET SÉQUENCES DE DÉPLOIEMENT
Le Space Support Equipment (SSE) est le système complet permettant le maintien, le pivotement et le déploiement du Lunar Roving Vehicle (LRV) depuis le LM. Il est constitué de deux sous-ensembles principaux, chacun conçu pour répondre aux contraintes de masse, de volume, de manipulation en EVA, d’effort humain et de sécurité.
Le sous-système de support structurel comprend les moulinets d’appui (support spools) en acier, fixés sur les bras d’appui du LM, qui maintiennent le LRV en position verticale avant le déploiement, les tripodes de transit (tripods) en aluminium, qui soutiennent le rover pendant le transit et empêchent toute rotation accidentelle, et le bras de support supérieur (upper support arm), qui retient l’avant du LRV contre le LM avant le déploiement. Ces tripodes et supports d’appui sont largués une fois que le rover repose sur ses roues. Le rôle global est d'assurer la stabilité et la sécurité du LRV pendant le lancement, l’atterrissage et la descente jusqu’au début de la séquence de déploiement.
Le sous-système de déploiement regroupe tous les actionneurs, liaisons, câbles, ressorts, verrous et dispositifs de contrôle permettant de libérer progressivement le LRV. Les tambours freinés (braked reels) associés aux sangles de manœuvre (operating tapes) contrôlent la rotation et la descente du rover depuis la baie du LM vers la surface lunaire, tandis que les câbles de déploiement des tambours (braked reel deployment cables) transmettent la force nécessaire pour un pivotement lent et contrôlé autour des points de pivot/support (rotation support points) du LM. Le ressort de poussée initial (push-off spring) amorce le pivot en repoussant légèrement le LRV après la libération des attaches structurelles.
Pendant la descente, les tubes télescopiques (telescopic tubes) guident l’avant du rover vers le sol, maintiennent son orientation correcte et empêchent tout basculement. Les verrous de châssis et goupilles de libération (chassis latches & release pins) retiennent les sections du châssis et les roues en position repliée jusqu’au moment exact du déploiement automatique, déclenché par l’angle de pivot et la force des ressorts internes. Les barres de torsion et ressorts internes (torsion bars & internal springs) assurent le déploiement automatique des sections du châssis et des roues, tandis que le pivotement contrôlé garantit le verrouillage automatique de toutes les pièces déployées.
Grâce à cette combinaison de composants, le LRV peut être déployé en toute sécurité par les astronautes, avec un effort minimal même en portant des combinaisons pressurisées et sur une gravité lunaire d’un sixième de celle de la Terre. Chaque composant du SSE joue un rôle précis pour assurer que le pivotement, le déploiement des sections, le guidage et le verrouillage final se déroulent de manière sûre, contrôlée et prévisible, conformément aux procédures développées et utilisées lors des missions Apollo 15, 16 et 17.
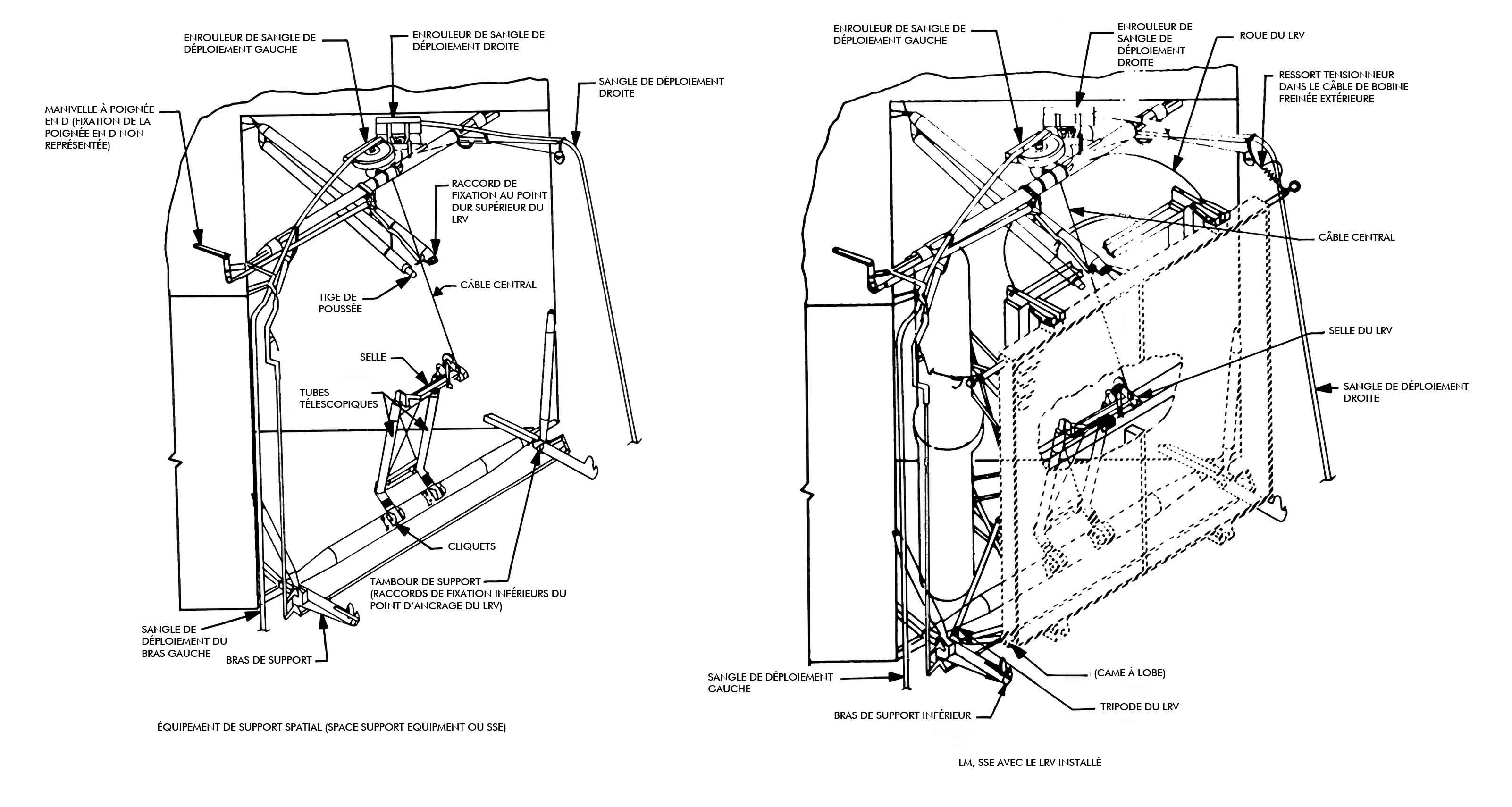 Schéma du SSE libre et avec le LRV en position |
|
SÉQUENCE FINALE DE DÉPLOIEMENT DU LRV – Apollo 15, 16, 17
Pour amorcer le déploiement, l’astronaute, positionné sur l’échelle du LM, tire le D-ring situé sur le flanc du module. Cette action retire la goupille de sécurité et libère le verrou supérieur de rangement, tout en mettant en tension les câbles de déploiement contrôlés par les tambours freinés, de manière à éviter tout mouvement brusque. Suite à cette action, les tripodes et bras supérieurs qui maintenaient le rover sont libérés ; le LRV n’est alors retenu que par les câbles, ce qui lui permet de pivoter légèrement vers l’extérieur et d’amorcer sa sortie de la baie du LM.
Le pivotement initial est assisté par un ressort de poussée, qui incline légèrement le LRV vers l’extérieur. La gravité lunaire, combinée à la régulation des tambours freinés et à l’action progressive de l’astronaute sur les operating tapes, permet au véhicule de pivoter lentement vers le sol sans chute libre. Lorsque l’angle devient suffisant, les release pins du châssis arrière se libèrent automatiquement et les torsion bars et ressorts internes déploient le châssis arrière ainsi que les roues arrière, avec des verrous automatiques assurant le positionnement final. À mesure que le LRV continue sa rotation, le châssis avant et les roues avant se déploient de manière similaire, également verrouillés automatiquement, garantissant que le véhicule est entièrement déplié tout en restant suspendu par les câbles.
Pendant la descente finale, deux tubes télescopiques de guidage maintiennent l’orientation correcte du LRV et empêchent tout basculement vers l’avant. Les câbles continuent de se dérouler lentement, permettant aux roues arrière de toucher le sol en premier, suivies des roues avant, de manière à ce que le poids du LRV soit progressivement transféré au sol sous contrôle total. Une fois le véhicule stabilisé sur ses quatre roues, les astronautes détachent les câbles des tambours, retirent les tubes télescopiques et éliminent les tripodes ou supports résiduels, laissant le LRV libre et totalement indépendant du LM.
Enfin, les astronautes procèdent à la configuration post-déploiement : mise en place des sièges, déploiement de l’antenne, activation de l’alimentation et vérification des moteurs et de la direction, préparant le LRV à circuler sur la surface lunaire.
Les composants SSE jouent chacun un rôle spécifique dans cette séquence : les tambours freinés et les sangles de manœuvre contrôlent la rotation et la descente du LRV, le ressort de poussée amorce le pivot initial, les tubes télescopiques guident l’avant pendant la descente finale, les goupilles de libération et les verrous retiennent puis libèrent les sections du châssis et les roues, les barres de torsion et ressorts internes assurent le déploiement automatique des sections, et les tripodes et supports (support spools) maintiennent le LRV dans la baie avant le déploiement.
Voici des tableaux sur les utilisations du LRV :
N° d'EVA |
Distance parcourue |
Temps de conduite |
EVA 1 |
10,3 km (5,6 mile nautique) |
1h 02 min |
EVA 2 |
12,5 km (6,7 mile n) |
1h 23 min |
EVA 3 |
5,1 km (2,7 mile n) |
0h 35 min |
Total |
27,9 km |
3h |
N° d'EVA |
Distance parcourue |
Temps de conduite |
EVA 1 |
4,2 km (2,3 mile nautique) |
0h 43 min |
EVA 2 |
11,3 km (6,1 mile n) |
1h 31 min |
EVA 3 |
11,4 km (6,2 mile n) |
1h 12 min |
Total |
26,9 km |
3h 26 min |
N° d'EVA |
Distance parcourue |
Temps de conduite |
EVA 1 |
3,3 km (1,8 mil nautique) |
0h 33 min |
EVA 2 |
20,3 km (11 mile n) |
2h 25 min |
EVA 3 |
12,1 km (6,5 mile n) |
1h 31 min |
Total |
35,7 km |
4h 29 min |
Acier hypereutectoïde: Un acier hypereutectoïde est un acier dont la teneur en carbone est supérieure à 0,8% (mais inférieure à 2,1%), aussi appelé acier à haute résistance.
Aluminium filé: Filer du métal, l'étirer à la filière pour obtenir un fil ou une pièce métallique profilée.
Direction à géométrie Ackermann : inventé par le constructeur allemand Georg Lankensperger à Munich en 1817, puis breveté en Angleterre par Rodolphe Ackermann, c'est un dispositif mécanique de direction permettant, avec une géométrie simple, de braquer les roues droite et gauche d'un essieu, avec une légère différence d'angle. Ceci permet, lors d'un virage, aux roues internes et externes de s'inscrire dans des cercles de rayons différents.
Source: Apollo Surface Journal.