LE PROGRAMME GEMINI
![]()
Le programme Gemini est initialement envisagé comme une simple évolution du programme Mercury et est donc nommé, à l'origine, Mercury Mark II. Toutefois, il partage peu de points communs avec Mercury et surpasse même, à certains égards, le programme Apollo. Cette supériorité résulte principalement de son lancement tardif, qui lui permet d'intégrer de nombreux enseignements tirés des premières phases du projet Apollo (lequel, bien que ses missions aient eu lieu plus tard, a en réalité débuté avant Gemini).
Spécifications du vaisseau Gemini :
Constructeur : McDonnell Aircraft Corporation
Premier vol : 8 avril 1964 ; premier vol habité le 23 mars 1965 (Gemini 3)
Dernier vol : 11 novembre 1966 (Gemini 12)
Nombre de vols : total 13, dont 10 habités
Utilisations pricipales : vols habités en orbite terrestre, rendez vous, amarrage, changements d'orbite, tests EVA
Coût à l'unité : 13 millions de dollars
Équipage : 2 astronautes
Longueur hors tout : 5,7 m
Diamètre maximum : 3,05 m
Volume habitable : 2,55 m3
Masse au lancement : 3 851 kg
Masse du carburant : 455 kg (total)
Impulsion totale du RCS : 1,168 kNs
Poussée du moteur principal : 710 N
Carburant du moteur principal : peroxyde d'azote (NTO) / monométhylhydrazine (MMH)
Delta-V total : 323 m/s
Énergie : piles à combustible/batteries ; puissance totale de 155.0 kW
(Les masses indiquées sont des valeurs moyennes et peuvent varier selon les missions.)
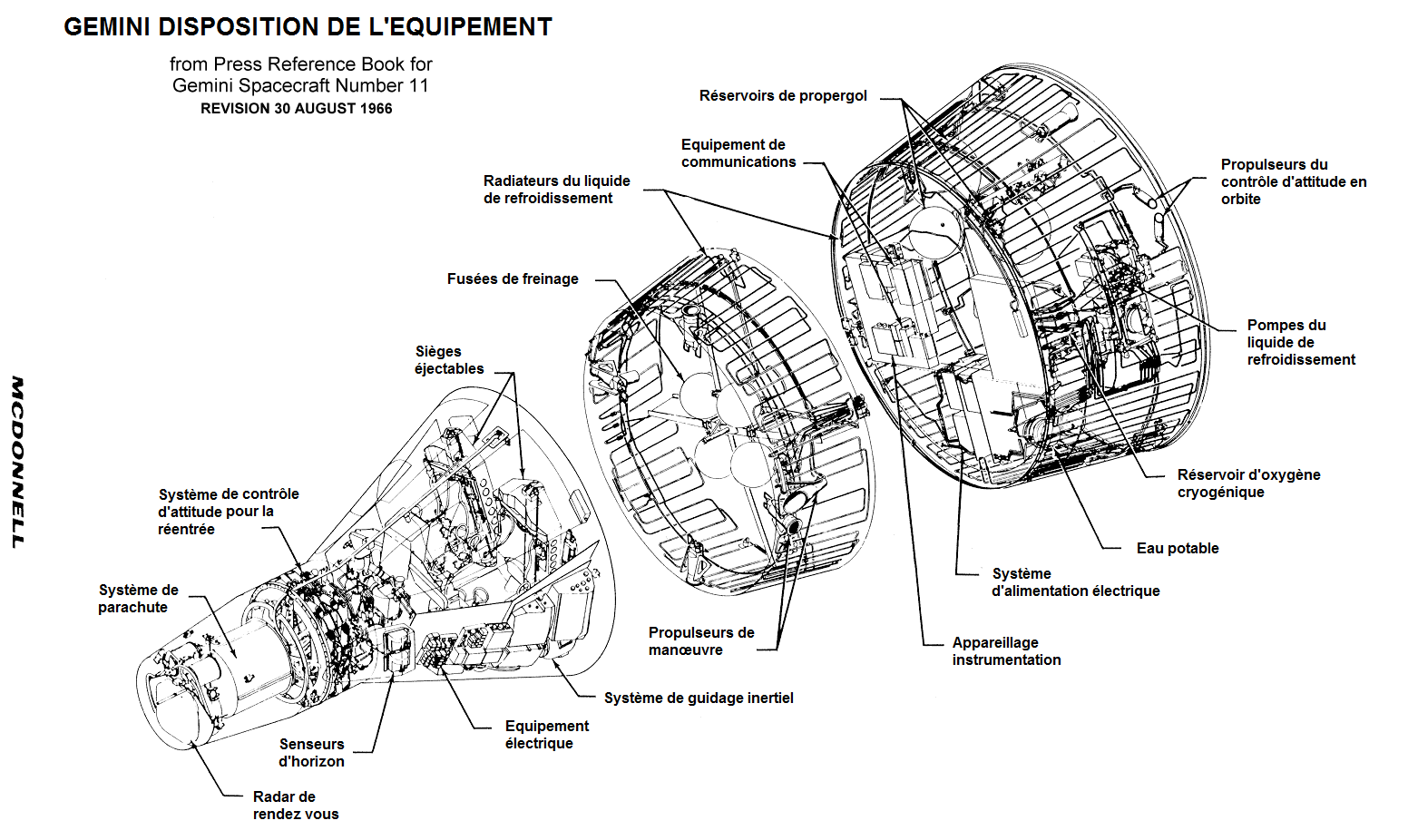
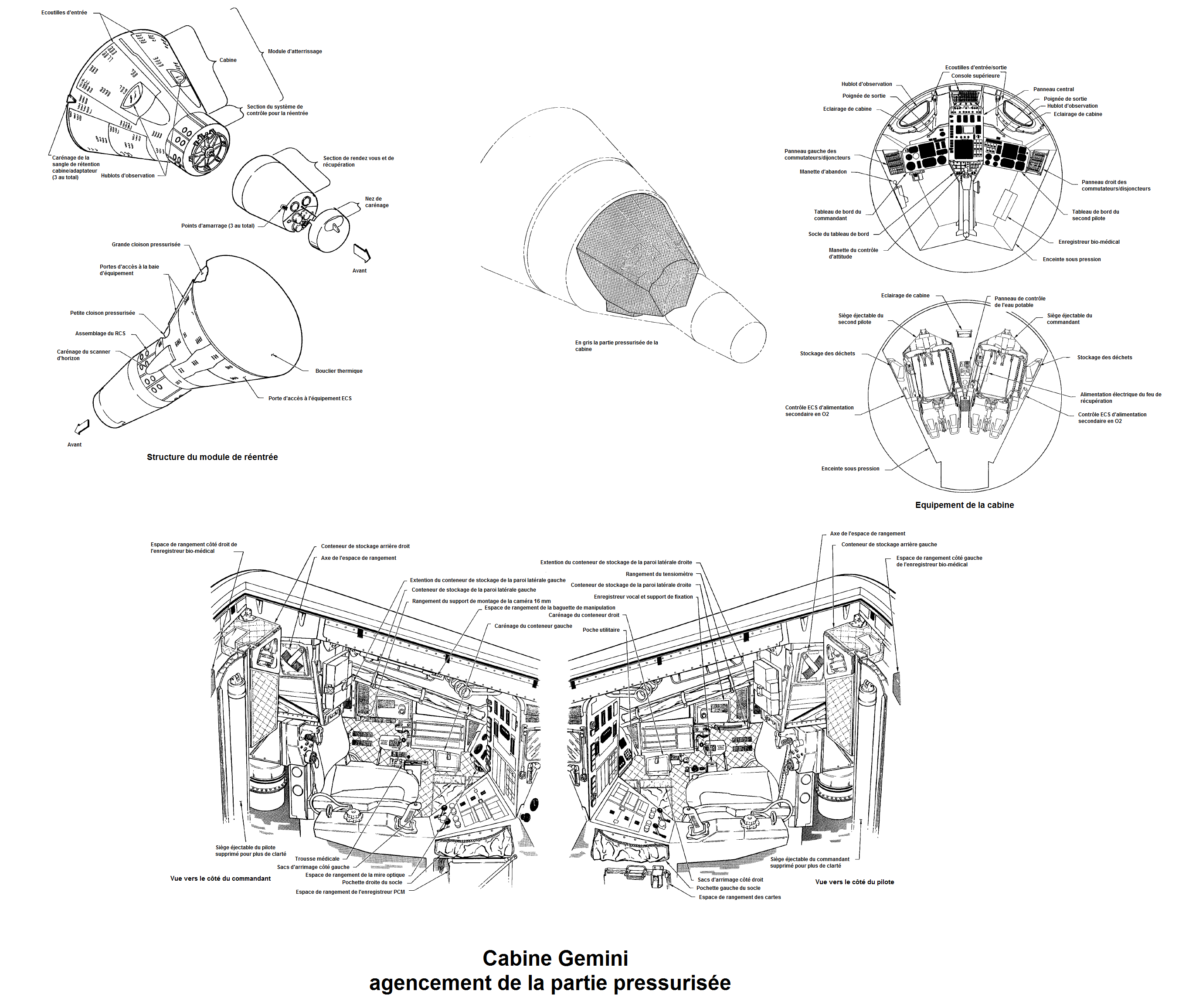
LA CABINE (module de rentrée atmosphérique)
La cabine, dont la forme s’apparente à celle d’un cône tronqué, est accouplée à la section RCS (à l'avant) et à l'adaptateur arrière. Elle intègre une enceinte pressurisée interne dont la conception assure une stabilité adéquate à l’équipage grâce à son comportement en flottaison.
L’espace libre entre l’enceinte pressurisée et la coquille conique externe permet l’installation d’équipements.
La structure de base de la cabine consiste en un châssis en titane soudé par fusion, sur lequel sont assemblés, également par soudure, les panneaux latéraux, les cloisons pressurisées (petites et grandes) ainsi que les encadrements des trappes d’accès. Ces panneaux et cloisons, de construction à double peau, sont renforcés par des raidisseurs soudés par points. L’accès à la cabine se fait par deux trappes articulées montées sur le rebord des encadrements. Pour la protection thermique, la surface conique externe est revêtue de bardeaux en alliage René 41, tandis qu’un bouclier thermique ablatif est fixé à l’extrémité opposée. Une boucle de levage à ressort, située entre les écoutilles à proximité du bouclier thermique, est déployée après l’amerrissage afin de permettre l’accrochage d’un crochet de levage pour la récupération du vaisseau spatial.
Effectif (équipage) : 2 astronautes
Longueur : 3,4 m
Diamètre maximum : 2,3 m
Volume habitable : 2,55 m3
Masse totale : 1982 kg
(structure, 638 kg ; bouclier thermique, 144 kg ; RCS, 133 kg ; équipement de récupération, 98 kg ; équipement de navigation, 63 kg ; équipement de télémétrie, 51 kg ; équipement électrique, 126 kg ; système de communications, 26 kg ; sièges de l'équipage & provisions, 426 kg ; masse de l'équipage, 144 kg ; imprévu divers, 100 kg ; carburant, 33 kg).
RCS :
Propulseurs : 8 paires, chaque propulseur fournissant 111 N
Carburant : peroxyde d’azote (NTO) / monométhylhydrazine (MMH)
Impulsion spécifique : 283 s
Impulsion totale : 90 kNs
Aérodynamique & énergie
Rapport portance / traînée en régime hypersonique (L/D) : 0,16
Source d'énergie : batteries : puissance de 4,0 kW, capacité de 180,0 Ah
Environnement cabine : oxygène pur à 340 mbar
Système d'atterrissage : similaire à celui de Mercury, mais sans sac d'atterrissage. Parachute principal en dôme de 25,6 m de diamètre.
Le saviez vous?? Le mode d’atterrissage initialement prévu reposait sur le déploiement d’une aile gonflable Rogallo, permettant un atterrissage piloté sur des patins au lac asséché d’Edwards. Toutefois, en raison des difficultés techniques empêchant un déploiement fiable de l’aile avant le début des vols, cette solution fut abandonnée au profit d’un amerrissage classique sous parachute.
LES BAIES À ÉQUIPEMENTS
Les baies à équipements sont situées à l'extérieur de l'enceinte pressurisée de la cabine. Deux baies sont installées sur les panneaux latéraux, tandis qu’une autre se trouve sous le plancher de la cabine. Ces baies sont dotées de racks permettant l’installation de divers équipements. La baie à équipements du côté droit abrite une grande partie des composants du système de communication, ainsi que la balise de récupération, montée à l’arrière. Deux panneaux permettent l’accès aux composants installés dans les baies latérales de la cabine. Les compartiments du train d’atterrissage principal, situés sous les baies à équipements droite et gauche, sont chacun fermés par une trappe. Bien que les trains d'atterrissage ne soient pas installés, des fixations sont prévues pour leur installation ultérieure, si nécessaire. Sous la cabine, entre les trappes du train d'atterrissage, se trouvent deux portes supplémentaires. La porte avant permet d'accéder à derniere la baie à équipements, tandis que la porte arrière permet d’accéder au compartiment du Environmental Control System (système de contrôle de l’environnement), qui fait partie de la cellule pressurisée.
UN TOUT NOUVEL APPAREILLAGE À BORD : L'ORDINATEUR
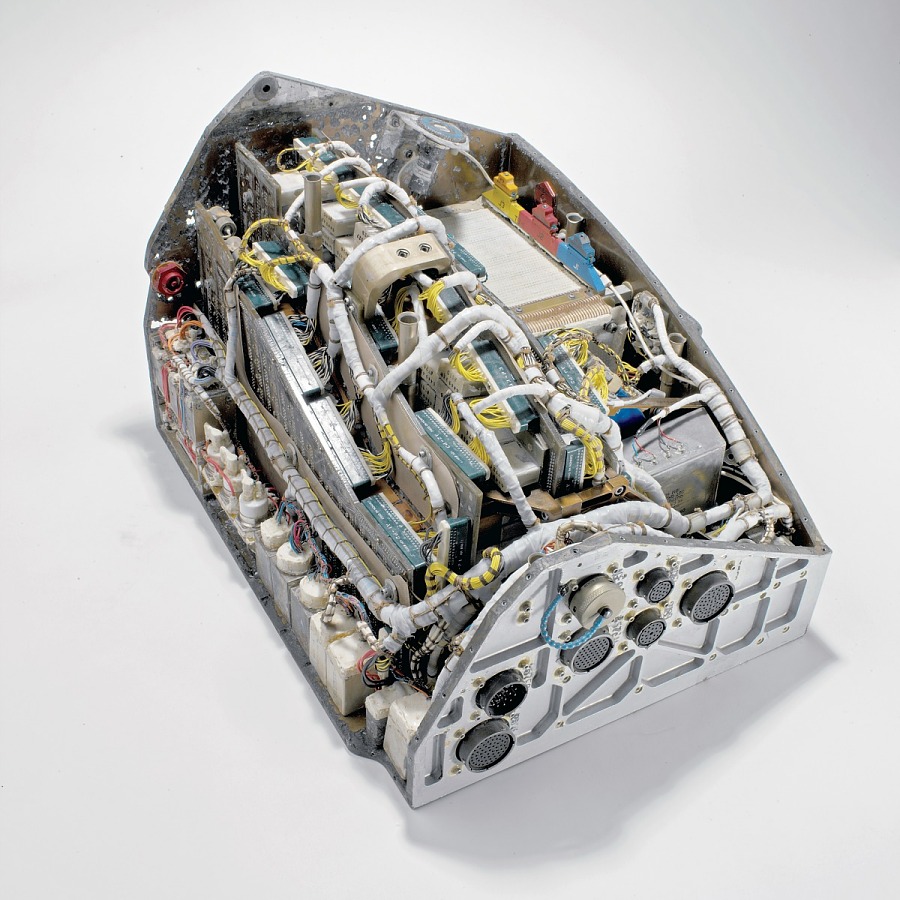
L'ordinateur du vaisseau spatial Gemini, souvent désigné sous des termes tels que "ordinateur du vaisseau spatial", "ordinateur numérique" ou "ordinateur de bord" (On-Board Computer ou OBC), est l'équivalent de l'AGC (Apollo Guidance Computer) utilisé dans le programme Apollo, bien que ses capacités et fonctionnalités soient plus limitées. L'OBC est principalement utilisé durant les phases post-lancement de la mission, telles que la phase d'orbite, la phase rétrograde et la phase de rentrée. Le lanceur Titan II, qui transporte le vaisseau spatial en orbite, est guidé par son propre ordinateur de guidage ACS-15 (séparé), mais l'OBC peut être utilisé comme système de secours en cas de besoin. Il est également intéressant de noter que L'OBC peut également contrôler automatiquement l'attitude du vaisseau spatial, mais il ne prend pas en charge le contrôle automatique de la vitesse. À la place, il effectue les calculs nécessaires pour les manœuvres telles que l'insertion orbitale ou la rentrée. Ensuite, les pilotes ajustent manuellement la vitesse du vaisseau spatial en fonction des résultats des calculs.
L'OBC a été conçu et fabriqué par la division Federal Systems d'IBM, située à Owego, dans l'État de New York. Ce système est très similaire à l'ordinateur numérique du véhicule de lancement (LVDC) d'Apollo, en particulier au niveau de l'unité centrale.
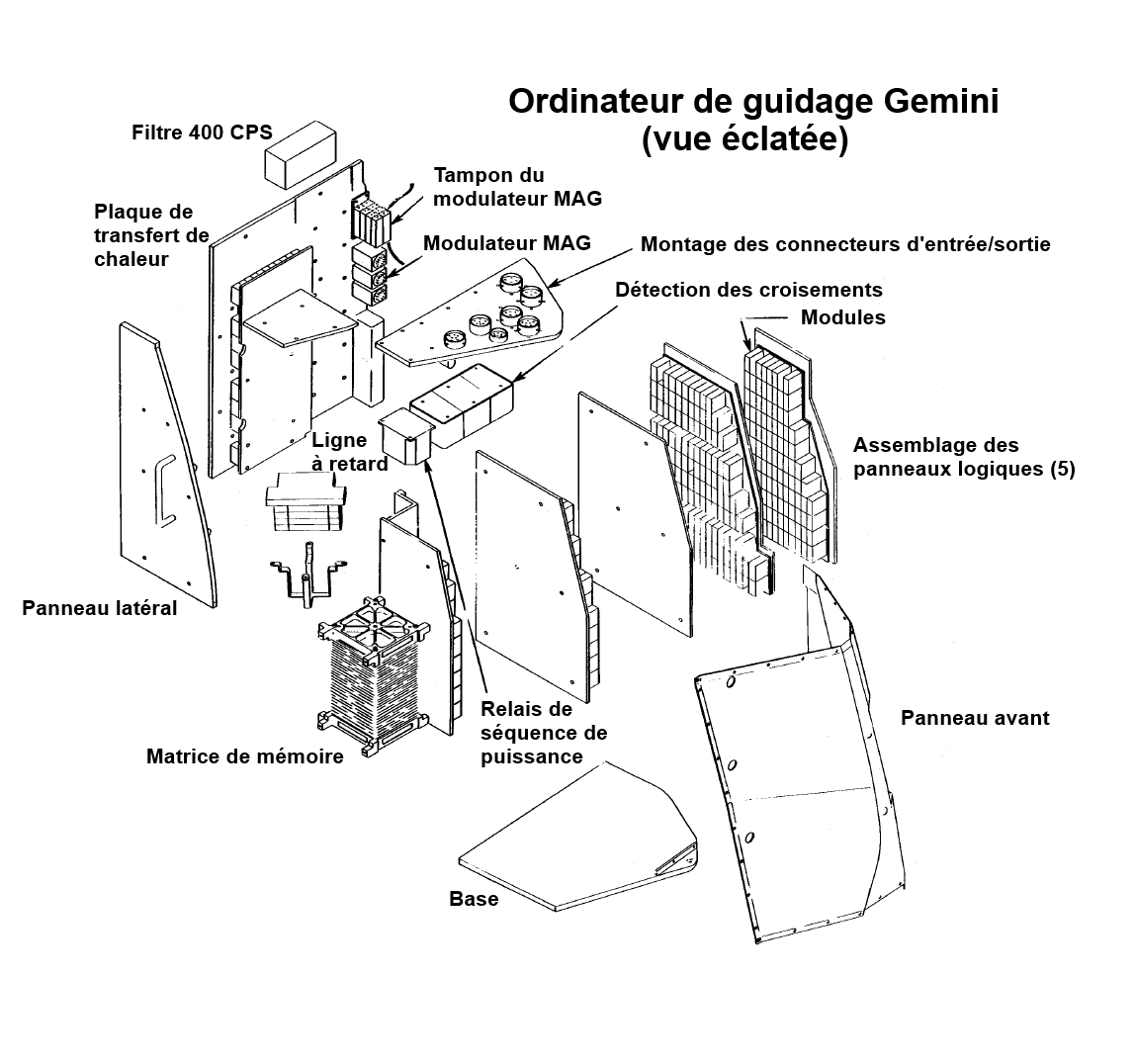
Il mesure 48 cm (18,9 in) de haut par 36,83 cm (14,5 in) de large par 32,38 cm (12,75 in) de profondeur, et pèse 26,75 kg (58,98 lb). L'ordinateur est composé de composants discrets plutôt que de circuits intégrés. Cependant, les modules de circuits qui contiennent les composants sont interchangeables. Ces modules se connectent à l'une des cinq cartes d'interconnexion et il faut un total de 510 modules pour constituer uniquement la section logique de l'ordinateur. Il convient de noter que l'OBC n'est pas doté de circuits redondants, ce qui signifie que toute défaillance de l'ordinateur annule les activités qu'il est censé contrôler. Par exemple, une défaillance de l'interrupteur d'alimentation aux trois quarts de la mission Gemini IV a entraîné l'annulation de la rentrée atmosphérique, qui était censée être contrôlée par l'ordinateur. Il est possible de piloter le vaisseau spatial sans l'ordinateur Gemini, car ce que l'ordinateur aurait accompli par erreur peut être soit abandonné (comme dans le cas du rendez-vous), soit géré, bien que de manière plus rudimentaire, par d'autres moyens (comme les procédures de rentrée atmosphérique utilisées pour Mercury).
Entrées et sorties
L'OCB est interfacé avec une pléthore d'autres systèmes, tel que la plate-forme inertielle (IMU), son électronique associée, l'alimentation du système de guidage inertiel (IGS pour Inertial Guidance System), l'unité d'alimentation auxiliaire (ACPU pour Auxiliary Computer Power Uni ), l'unité d'insertion manuelle des données (MDIU), le système de référence temporelle (TRS pour Time Reference System), le système de commande numérique (DCS), l'affichage d'attitude, l'électronique de contrôle d'attitude et de manœuvre (ACME pour Attitude Control and Maneuver Electronics), le pilote automatique du lanceur Titan, le tableau de commande et d'affichage des pilotes (PCDP pour Pilots' Control and Display Panel), l'indicateur de vitesse incrémentielle (IVI pour Incremental Velocity Indicator), le système d'instrumentation (IS pour Instrumentation System) et l'équipement aérospatial au sol (AGE).
L'IMU utilisée dans Gemini est une plate-forme stable à cardan, similaire à celle d'Apollo, équipée d'accéléromètres et de résolveurs angulaires. Toutefois, une différence majeure réside dans le fait que l'IMU de Gemini dispose de quatre cardans, contrairement aux trois cardans présents dans celle d'Apollo. Cette configuration permet d'éviter le phénomène de "verrouillage de cardan", et simplifie ainsi le logiciel utilisé pour ajuster l'alignement du vaisseau spatial, par rapport à l'utilisation de trois cardans. La valeur du quatrième cardan devient particulièrement évidente lorsqu'on considère des incidents tels que l'accident de Gemini VIII, au cours duquel un roulis incontrôlé s'est produit. Si l'IMU n'avait eu que trois cardans, un blocage de cardan se serait produit lorsque l'angle de roulis serait devenu trop important, rendant le contrôle du vaisseau plus complexe. |
L'ordinateur de bord assure les calculs nécessaires en utilisant des données provenant d'autres systèmes ainsi qu'un programme stocké, tout en permettant le stockage des paramètres requis pour le guidage et le contrôle. Les calculs effectués sont utilisés pour l'insertion orbitale, la correction d'orbite et le guidage de rentrée. L'ordinateur lui-même ne contient pas de commandes ni d'indicateurs, à l'exception de l'indicateur de temps écoulé. Toutefois, il peut être contrôlé via quatre interrupteurs. Sur le côté gauche de la console du pédestal, on trouve : un interrupteur ON-OFF à deux positions, un sélecteur de mode à sept positions déterminant le type de calculs à effectuer. Un interrupteur START COMP à bouton-poussoir permettant à l'astronaute de lancer certains calculs à sa convenance, avec le voyant COMP indiquant le début et la fin de chaque calcul. Un interrupteur RESET à bouton-poussoir permettant de réinitialiser l'ordinateur en cas de dysfonctionnement temporaire. Finalement, le voyant MALF indiquant l'état de fonctionnement de l'ordinateur.
Le dispositif périphérique le plus visible de l'OBC est une unité d'insertion manuelle des données (Manual Data Insertion Unit ou MDIU), l'équivalent Gemini du DSKY d'Apollo. Cet outil permet au pilote de communiquer directement avec l'ordinateur. Il comprend le clavier d'affichage modulaire (Modular Display Keyboard ou MDK) et le lecteur d'affichage modulaire (Modular Display Readout ou MDR). Ces éléments sont situés du côté du pilote (par opposition au commandant) sur le panneau de commande, en bas à droite. Ils permettent l'insertion, la lecture ou l'effacement de paramètres spécifiques dans la mémoire de l'ordinateur. De plus, un indicateur incrémental de vitesse (Incremental Velocity Indicator ou IVI) affiche les changements de vitesse. Ces changements peuvent être mesurés ou calculés, selon le mode de sélectionné de l'ordinateur.
L'alimentation électrique
L'alimentation en courant alternatif et en courant continu de l'OBC est assurée par l'alimentation de l'IGS, lui-même alimenté par le bus principal +28 VCC du vaisseau spatial. En cas de très brèves coupures de l'alimentation principale, l'unité d'alimentation auxiliaire de l'ordinateur (ACPU) prend le relais. Le courant continu régulé fourni à l'ordinateur est stabilisé dans le bloc d'alimentation du système de guidage inertiel de manière à éliminer toute perte de régulation causée par les transitoires qui se produisent dans la source d'alimentation principale de l'engin spatial. L'OBC nécessite plusieures tensions : +27,2 VCC, +9,3 Vcc -27,2 VCC, +20 VCC, +28 VCC, et 26 CA. Cependant, la documentation existante présente des incohérences concernant les tensions exactes utilisées. De plus, l'OBC alimente également le MDIU avec des tensions de +25 VCC, -25 VCC +8 VCC. Ces trois dernières tensions sont celles utilisées en interne par l'OBC.
Ses capacités informatiques
Mémoire principale
La mémoire de l'OBC est une matrice de ferrite à accès aléatoire, à courant coïncident et à lecture non destructive (RAM). L'élément de base de cette mémoire est un noyau de ferrite à deux trous.
L'élément de mémoire est un dispositif de lecture non destructive (NDRO ou Non-Destructive ReadOut), le Transfluxor, inventé pour être utilisé dans le futur Observatoire astronomique en orbite (OAO pour Orbiting Astronomical Observatory). La conception repose sur le principe de la lecture à ouvertures multiples (MARS pour Multi-Aperture Readout Sensing). Ce principe utilise un noyau à deux trous contrairement au "donut" à un trou couramment utilisé dans les conceptions de mémoire. Le dispositif MARS détecte l'état logique d'un noyau au niveau de l'un des trous, et restaure l'état en pulsant électriquement le second trou (NDA : c'est ma compréhension limitée), réalisant ainsi une lecture non destructive, une exigence critique pour les applications spatiales. 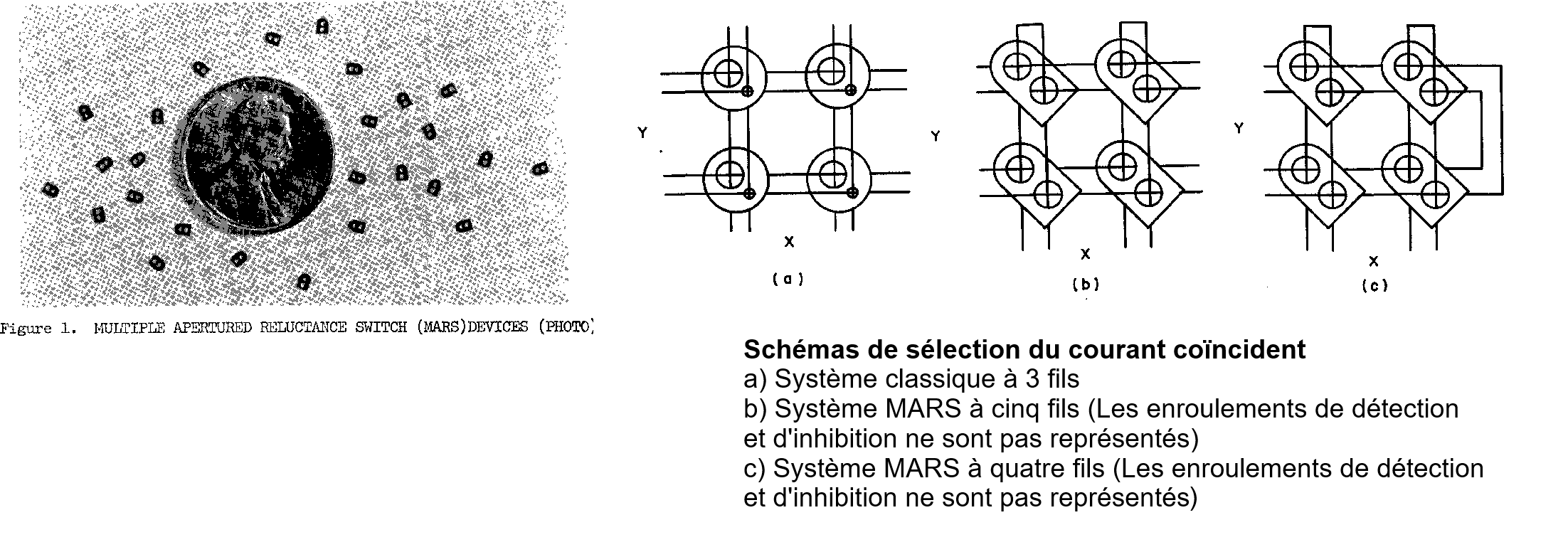 Le Transfluxor possède donc des caractéristiques NDRO, mais une certaine dégradation de l'information se produit, et l'information est détruite par des cycles de lecture répétés. Ce phénomène est généralement compensé par l'application, après chaque opération de lecture, d'une impulsion de "renforcement" à tous les noyaux, sans tenir compte de l'adresse qui a été lue. Il est modifiable électriquement, bien que l'opération d'écriture soit généralement plus longue et nécessite plus d'énergie que l'opération d'écriture pour un noyau DRO. Néanmoins, ces éléments peuvent être utilisés dans des applications où les informations sont lues beaucoup plus fréquemment qu'elles ne sont écrites, comme le stockage de programmes avec seulement un besoin occasionnel de modifier le programme en temps réel. L'application principale de cet élément est cependant la mise en œuvre de mémoires en lecture seule. Leur temps de lecture (1 µsec ou moins) est généralement égal à 1/10 du temps d'écriture. Ce temps de lecture se compare favorablement au temps d'accès des noyaux DRO utilisés dans les mémoires spatiales. 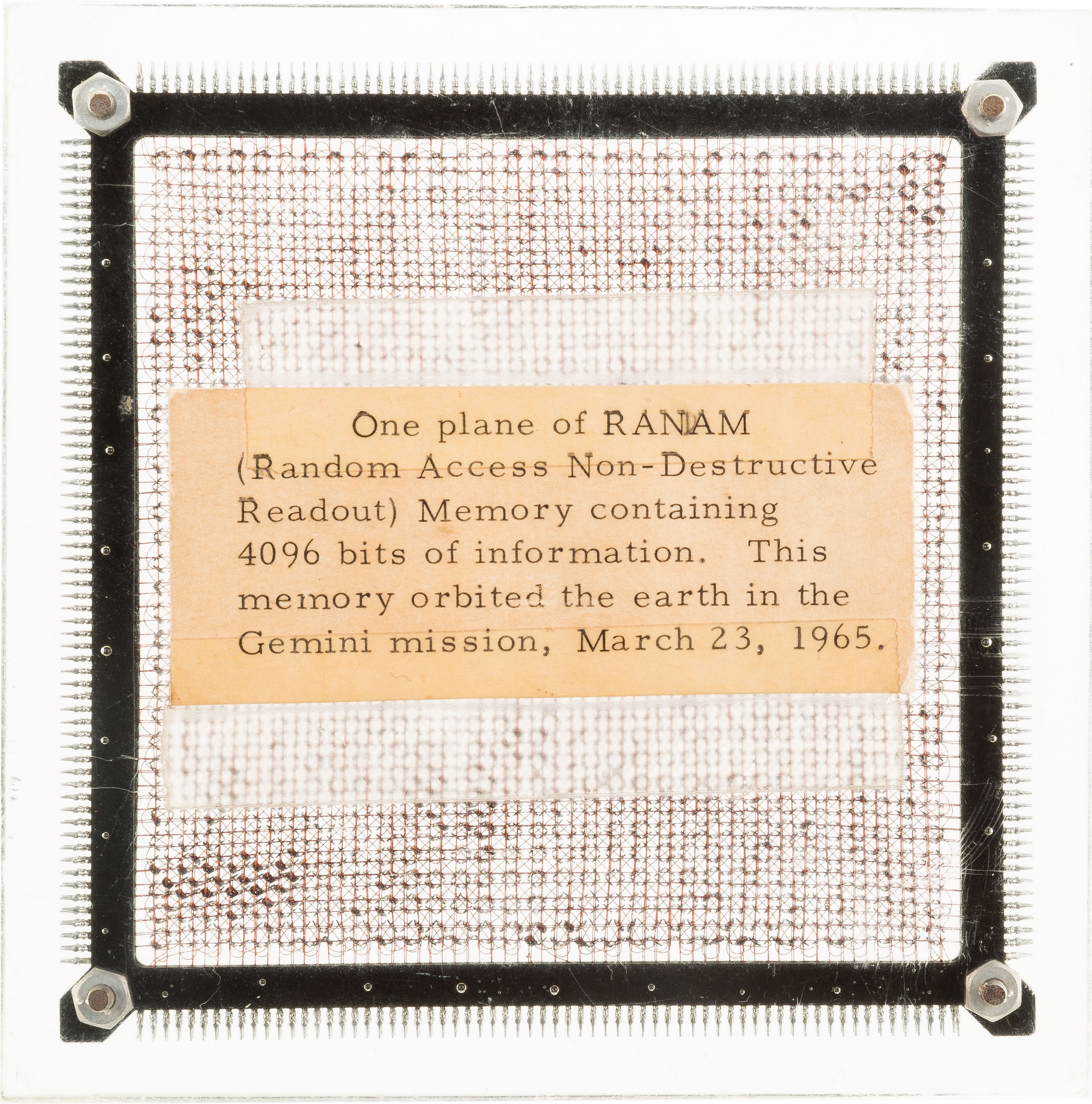 |
La propriété de lecture non destructive permet de lire ou d'écrire en série ou en série-parallèle, ce qui permet d'utiliser une unité arithmétique série sans registre tampon séparé. La matrice de mémoire peut stocker 4096 mots, soit 159 744 bits. Tous les mots mémoire de 39 bits sont divisés en trois syllabes (syllabe 0, syllabe 1 et syllabe 2) de 13 bits chacune. Les mots de données (25 bits et un signe) sont normalement stockés dans les deux premières syllabes, et les mots d'instructions (13 bits) sont mélangés dans les trois syllabes. Une fois le vaisseau spatial retiré du hangar, il n'est plus possible de modifier la troisième syllabe d'un quelconque mot mémoire. Une modification limitée des données stockées dans les syllabes 0 et 1 peut être effectuée sur le site de lancement par l'intermédiaire de l'unité d'insertion manuelle des données (Manual Data Insertion Unit ou MDIU) ou du système de commande numérique (DCS pour Digital Command System).
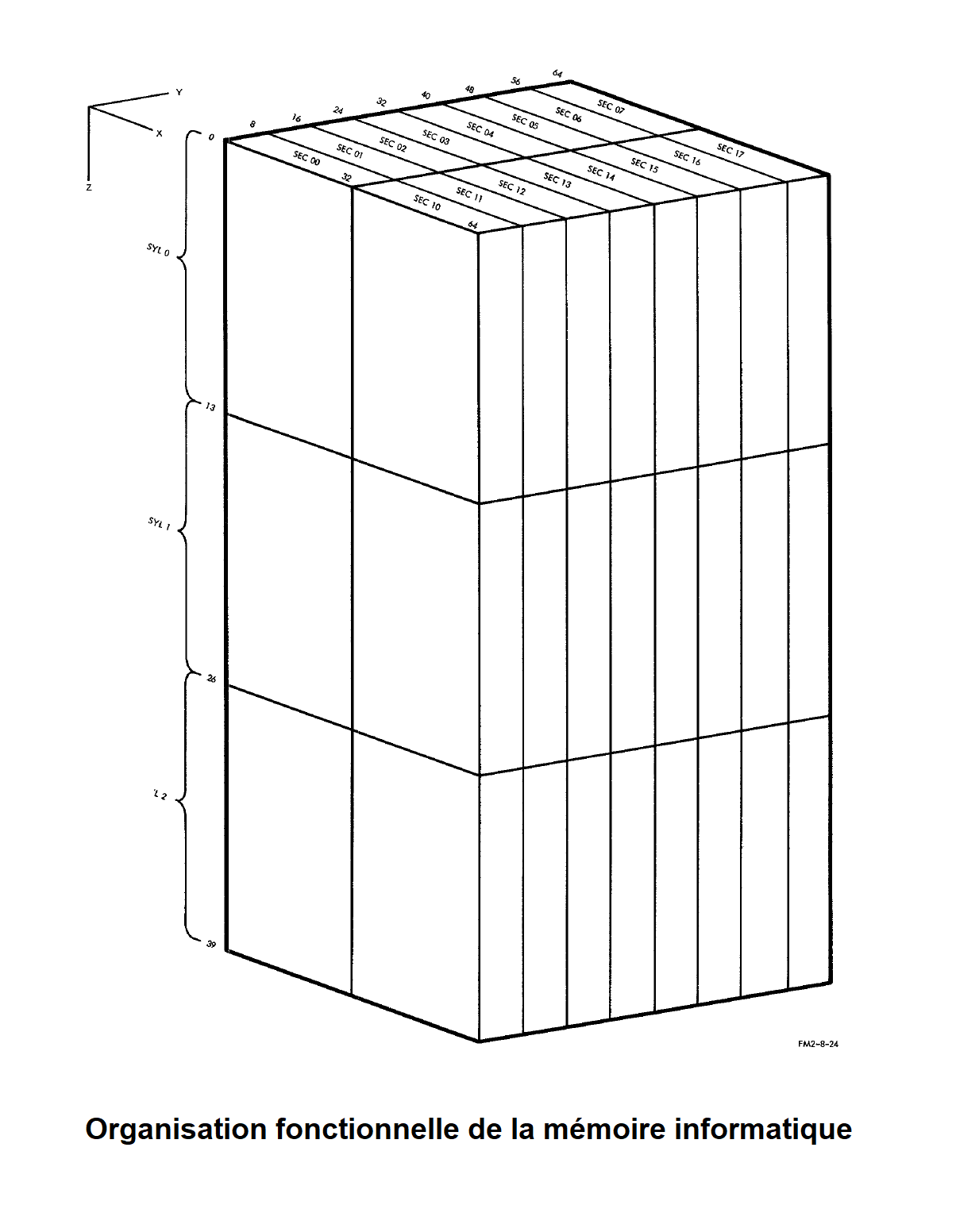
La mémoire est une matrice de 64 x 64 x 39 bits composée d'éléments de lecture non destructifs. Physiquement, Elle est constituée d'une pile de 39 plans empilés dans la dimension Z (hauteur, voir schéma), chaque plan étant constitué d'un réseau de 64 x 64 noyaux.
La mémoire est subdivisée en parties plus petites pour optimiser l'efficacité du stockage des programmes. La dimension Z est divisée en trois syllabes (SYL 0, SYL 1, SYL 2), chaque syllabe contenant 13 bits. Le plan X-Y est divisé en 16 secteurs de 256 mots chacun (SEC 00 à SEC 07, et SEC l0 à SEC 17), le secteur 17 étant défini comme le secteur résiduel. Un mot mémoire est composé des 39 bits le long de la dimension Z et se situe dans l'une des 4096 positions possibles de la grille X-Y. Un mot d'instruction ou une commande nécessite 13 bits et est codé dans les syllabes 0, 1 ou 2 d'un mot mémoire. Un mot de données nécessite 26 bits et est codé dans les syllabes 0 et 1. Les informations stockées dans la syllabe 2 peuvent être lues sous la forme d'un mot de données court en utilisant un mode d'opération spécial principalement utilisé pour vérifier le contenu de la mémoire. À tout moment, seuls deux secteurs sont réellement accessibles : le secteur courant (sélectionnable sous le contrôle du programme) et le secteur 'résiduel' (secteur 17 octal)
Mémoire auxiliaire
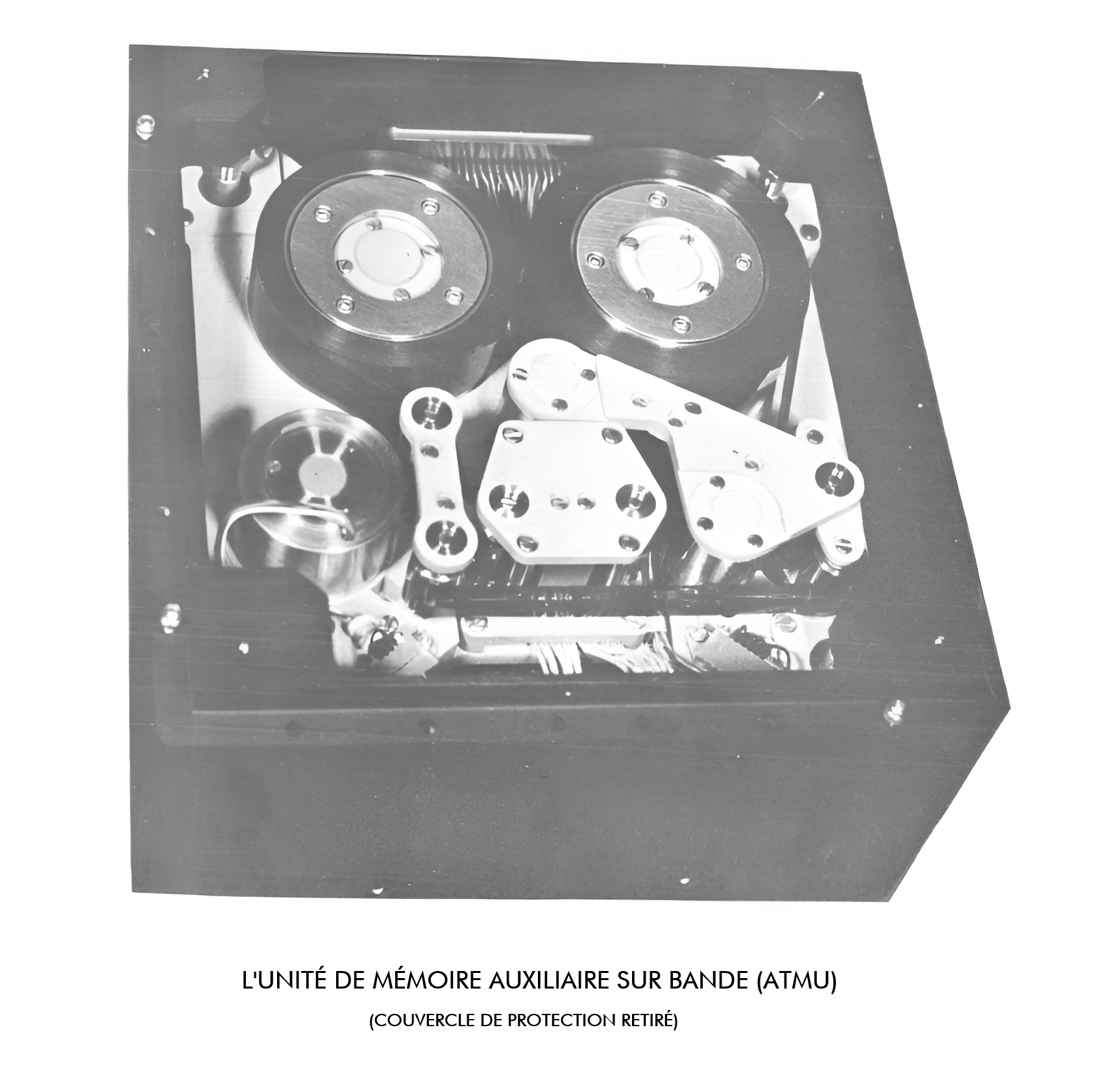
L'OBC est le premier ordinateur aéroporté ou spatial à utiliser une mémoire auxiliaire. À un moment donné de l'évolution du programme opérationnel, l'augmentation des fonctionnalités a entraîné un dépassement de la taille du programme opérationnel par rapport à la quantité totale de mémoire fournie par le réseau de ferrites. Pour les missions Gemini VIII à XII, l'approche adoptée a consisté à modulariser le logiciel de manière à pouvoir le recharger dans l'OBC au cours de la mission, avec un logiciel spécialisé pour chaque phase de la mission. Ainsi, même si nous parlons (par exemple) du "logiciel pour Gemini X", ce logiciel est en réalité constitué de plusieurs programmes différents qui sont chargés uniquement pendant les phases de la mission où ils sont nécessaires. Les programmes sont stockés dans l'unité de mémoire auxiliaire sur bande (Auxiliary Tape Memory Unit ou ATMU), puis transférés dans l'OBC. Ce concept, assez courant dans l'utilisation des ordinateurs terrestres, est une première pour l'informatique aérospatiale. Normalement, ces données sont fournies par l'équipement aérospatial au sol (AGE) et enregistrées (écrites) sur la bande avant le lancement. Il est également possible d'écrire des données sur la bande à l'aide du MDIU et de l'ordinateur de bord.
L'ATMU est un système d'enregistrement à bande magnétique autonome. Il comprend un transporteur de bande, un moteur d'entraînement et l'électronique nécessaire aux fonctions de lecture, d'écriture et de vérification. Il est utilisé dans les vaisseaux spatiaux Gemini VIII à XII pour fournir un stockage de programme supplémentaire pour l'ordinateur numérique. Sa capacité totale de stockage dépasse 85 000 mots de 13 bits, soit environ sept fois celle de la mémoire centrale de l'ordinateur. L'ATMU est monté sur une plaque froide dans la section adaptateur du vaisseau spatial.
D'après les spécifications de l'ATM figurant dans le manuel de familiarisation, nous pouvons calculer le temps nécessaire pour charger un programme de l'ATMU dans l'OBC. Avec une longueur totale de bande de 160 m (525 ft) et une vitesse de lecture/écriture de 3,81 cm/s (1,5 in/s), la totalité de la bande peut être lue ou écrite en 70 min. Si un rembobinage de la bande est nécessaire, l'opération complète prendrait également un rembobinage à une vitesse de x8, ce qui ajoute un maximum de 8,75 minutes supplémentaires. Étant donné que la bande a une capacité sept fois supérieure à celle de la mémoire centrale de l'OBC, toute charge individuelle, sans tenir compte du rembobinage de la bande, serait d'environ 70/7 = 10 min. Cependant, comme toute la mémoire ne peutt pas être écrasée et que la syllabe 2 des mots de mémoire de 39 bits ne peut pas être modifiée en vol, les chargements réels prennent moins de temps et sont estimés à environ 7 min.
Le chargement du logiciel de l'ATMU dans l'OBC est une opération logicielle, et non purement matérielle. Cela signifie qu'une partie du logiciel, responsable du chargement, reste dans l'OBC sans être écrasée. Cette partie invariante du logiciel est appelée "module I". En tout, il existait six modules. Il y a deux méthodes pour charger la mémoire de l'ordinateur à partir de l'ATMU : le mode automatique, qui est la méthode principale, et le mode manuel, qui constitue une alternative pour le chargement de la mémoire. La différence fondamentale entre ces deux méthodes est que le mode automatique nécessite moins d'opérations manuelles.
Le saviez vous ?? Gemini VIII fut la première mission à disposer de l'ATMU à bord. Après un rendez-vous et un amarrage réussi avec l'Agena, le vaisseau spatial combiné commença à partir en vrille. Le centre de contrôle de la mission décida de désengager l'Agena et de faire redescendre Gemini, car une grande quantité de carburant pour les propulseurs de contrôle d'attitude avait été gaspillée en tentant de reprendre le contrôle de l'engin spatial. Ainsi, la première tentative de chargement d'un programme depuis l'ATMU eut lieu alors que le vaisseau spatial était en rotation. Bien que les spécifications de la mémoire auxiliaire sur bande prévoyaient des niveaux de vibration faibles, le programme de rentrée fut chargé avec succès et utilisé lors de la descente suivante.
IBM réussit à dépasser les spécifications de fiabilité grâce à un programme d'essais rigoureux. Par exemple, après que la mémoire auxiliaire eut échoué aux tests de vibration de préqualification, IBM ajouta un volant d'inertie en laiton et des masses sur les bobines de bande pour améliorer la stabilisation, permettant ainsi de charger le programme avec succès dans des conditions défavorables. Un autre problème se posa avec des court-circuits des transistors dus à des particules trop petites pour être détectées par rayons X, mais qui se détachaient lors de l'accélération. L'amélioration de la propreté lors de la fabrication résolut ce problème.
Les programmes informatiques contenus dans la mémoire comprennent un programme d'exécution, des programmes opérationnels et des sous-programmes de calcul standard. Le programme d'exécution réalise des contrôles de diagnostic, détermine le temps écoulé, sélectionne le programme opérationnel souhaité et exécute tous les sous-programmes d'entrée/sortie de données.
L'ordinateur comporte deux éléments arithmétiques : un élément d'addition-soustraction (accumulateur) et un élément de multiplication-division. Chaque élément fonctionne indépendamment, mais les deux sont gérés par les mêmes circuits de contrôle du programme. L'OBC peut réaliser 7000 opérations par seconde. Son cycle d'instruction est de 140 µs (microseconde). Une multiplication nécessite 3 cycles (420 µs), une division : 6 cycles (840 µs). Toutes les autres instructions nécessitent 1 cycle chacune. D'autres instructions peuvent être programmées simultanément avec les opérations de multiplication et de division. Le taux de bits arithmétiques est de 500 kilocycles, et le taux de cycles de mémoire est moitié moindre. L'ordinateur fonctionne en série, transmettant les bits un par un, ce qui explique les vitesses de traitement relativement lentes, inférieures à celles de certains ordinateurs à tube à vide tels que le Whirlwind. L’unité arithmétique est par ailleurs limitée à des calculs à virgule fixe, un choix qui réduit la précision des calculs mais permet de simplifier la conception, et donc le volume, la masse et la consommation d’énergie du calculateur.
Le Manual Data Insertion Unit
L'unité d'insertion manuelle des données (MDIU) se compose physiquement du clavier d'affichage modulaire (MDK) et du lecteur d'affichage modulaire (MDR). Le MDIU permet au pilote d'insérer des données dans la mémoire de l'ordinateur et d'en lire. le MDK et le MDR sont des dispositifs électromécaniques.
Insertion des données : Avant d’insérer des données dans l’ordinateur, toutes les données existantes sont effacées du MDIU en appuyant sur le bouton-poussoir CLEAR du MDR. Ensuite, les boutons-poussoirs d'insertion de données du MDK sont utilisés pour configurer un numéro décimal à 7 chiffres. Les deux premiers chiffres à partir de la gauche spécifient l'adresse de la mémoire de l'ordinateur dans laquelle les données doivent être stockées, tandis que les cinq derniers chiffres correspondent aux données elles-mêmes. Au fur et à mesure que les données sont définies, elles sont automatiquement envoyées à l'accumulateur de l'ordinateur. Une vérification chiffre par chiffre de l'adresse et des données est effectuée au moyen des dispositifs d'affichage ADDRESS et MESSAGE du MDR. Après vérification, on appuie sur le bouton-poussoir ENTER du MDR pour enregistrer les données dans l'emplacement de mémoire sélectionné.
Le MDK mesure 8,58 cm (3,38 in) de large et 14 cm (5,51 in) de profondeur. Il pèse 0,616 kg (1,36 lb).
Lecture des données : Avant de lire les données à partir de l'ordinateur, toutes les données existantes sont effacées du MDIU en appuyant sur le bouton-poussoir CLEAR. Ensuite, les boutons-poussoirs d'insertion de données sont utilisés pour configurer un nombre décimal à deux chiffres. Les deux chiffres spécifient l'adresse de l'emplacement mémoire de l'ordinateur à partir duquel les données doivent être lues. Une vérification chiffre par chiffre de l'adresse est effectuée au moyen des dispositifs d'affichage de l'ADRESSE. Après vérification, le bouton READ OUT du MDR est actionné et les données sont lues à partir de l'emplacement mémoire sélectionné et affichées par les dispositifs d'affichage MESSAGE.
Le MDR mesure 8,28 cm (3,26 in) de haut, 12,72 cm (5,01 in) de large et 16,28 cm (6,41 in) de profondeur. Il pèse 1,42 kg (3,15 lb).
Les commandes et les indicateurs situés sur le MDK et le MDR sont illustrés ci-dessous. La légende qui l'accompagne identifie les commandes et les indicateurs et décrit leur fonction.
René 41 : il s'agit d'un superalliage à base de nickel, forgé à haute température, offrant une robustesse exceptionnelle. Ce matériau est utilisé dans des réacteurs, des composants de missiles et dans d'autres applications nécessitant une haute résistance à des températures extrêmes. Sa composition est la suivante : Chrome 17,5 à 20%, cobalt 10 à 12%, molybdène 9 à 10,5%, titane 3 à 3,3%, aluminium 1,4 à 1,8%, le reste étant du nickel.
Syllabe : en informatique, une syllabe (SYL) désigne une unité de stockage d'informations propre à une plate-forme. La largeur en bits (et parfois les regroupements internes) qui lui sont associés varient en fonction du matériel cible.
Sources : PDF : Gemini Spacecraft No_ 1 Manual, Gemini Manual Vol1, Gemini Manual Vol1 Sec 2, Gemini Manual Vol 2, Gemini Manual Vol 2 Sec 2 ; PDF State-of-the-Art of Aerospace Digital Computers, 1962-1967 June 22 1967 ; The Development of a Multiaperture Reluctance Switch by A. W. Vinal IBM Corporation Space Guidance Center Owego, New York. Development of On-board Space Computer Systems A. E. Cooper and W. T. Chow. Livre : Life in Space. Texte de Paul Cultrera, tous droits réservés.