RCS DU MODULE DE SERVICE
![]()
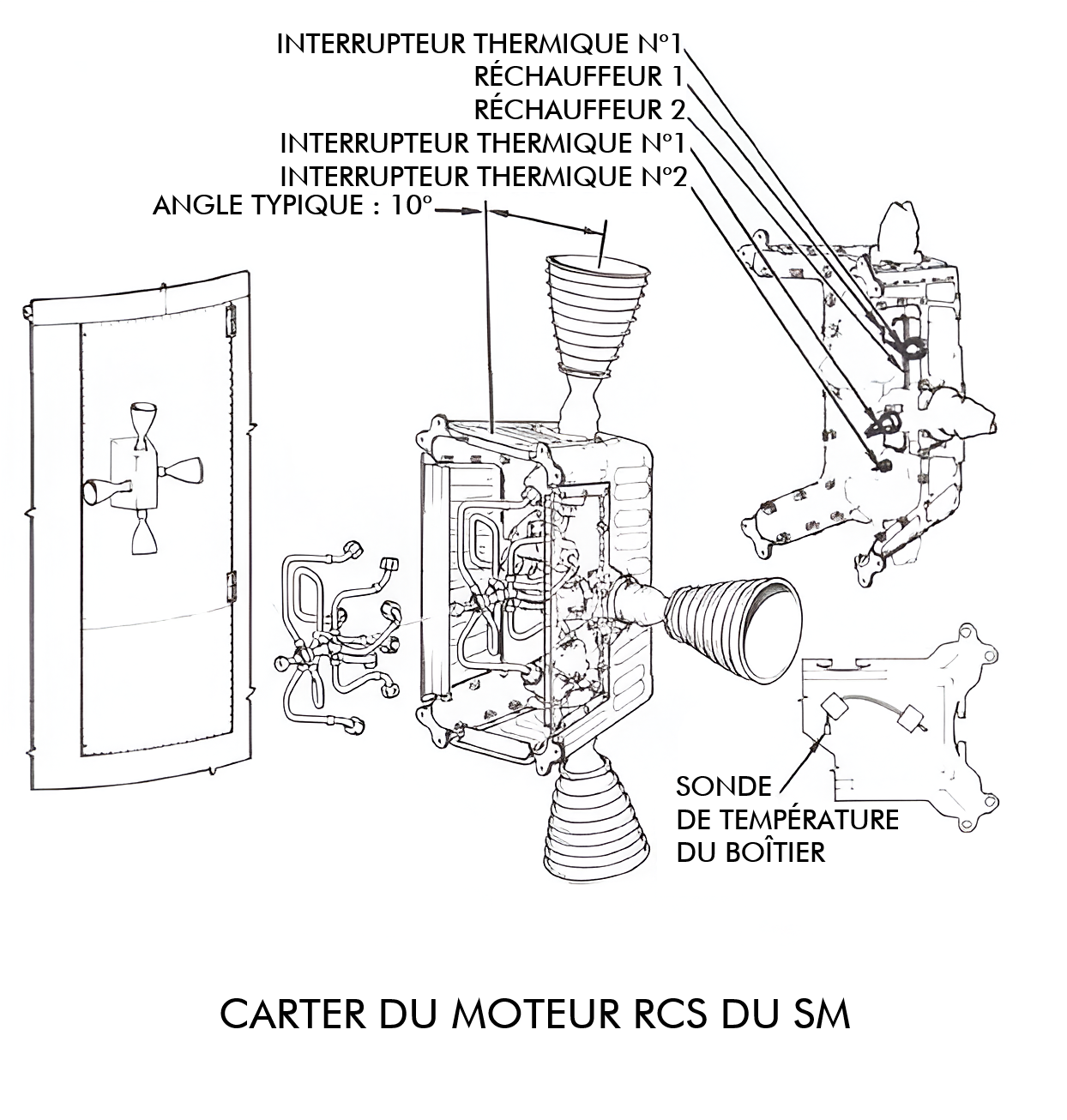
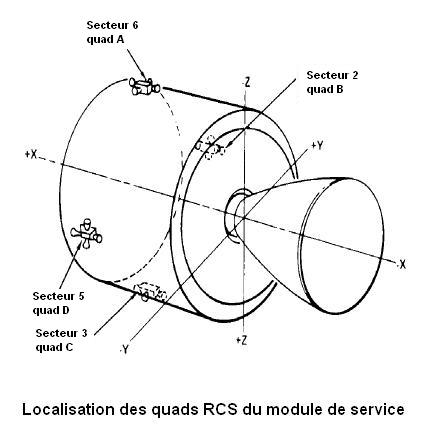
Le système de contrôle d'attitude par réaction, ou RCS (Reaction Control System) du module de service fournit la poussée nécessaire aux manœuvres d’attitude normales et d’urgence du vaisseau spatial Apollo. Son fonctionnement est déclenché par des signaux de commande automatiques émis par le sous-système de stabilisation et de contrôle (SCS), en coordination avec le sous-système de guidage et de navigation. Le RCS peut également être commandé manuellement par l’équipage. Il se compose de quatre groupes fonctionnellement identiques, disposés à 90° les uns des autres autour de la partie avant (axe +X, axe de roulis) de la périphérie du SM, et décalés de 7 degrés 15' par rapport aux axes Y et Z du vaisseau. La configuration de chaque groupe, appelé "QUAD", prévoit que les moteurs-fusées sont montés à la surface extérieure du panneau, tandis que les autres composants sont situés à l'intérieur. Les lignes de distribution des ergols traversent la paroi du panneau afin d’acheminer le propergol jusqu’aux chambres de combustion des moteurs. Ces chambres sont inclinées d'environ 10° par rapport à la structure du panneau, afin de limiter les effets des gaz d'échappement sur le revêtement du SM. Les deux moteurs de roulis de chaque quad sont montés de façon décalée pour permettre le passage de la plomberie dans la structure de montage.
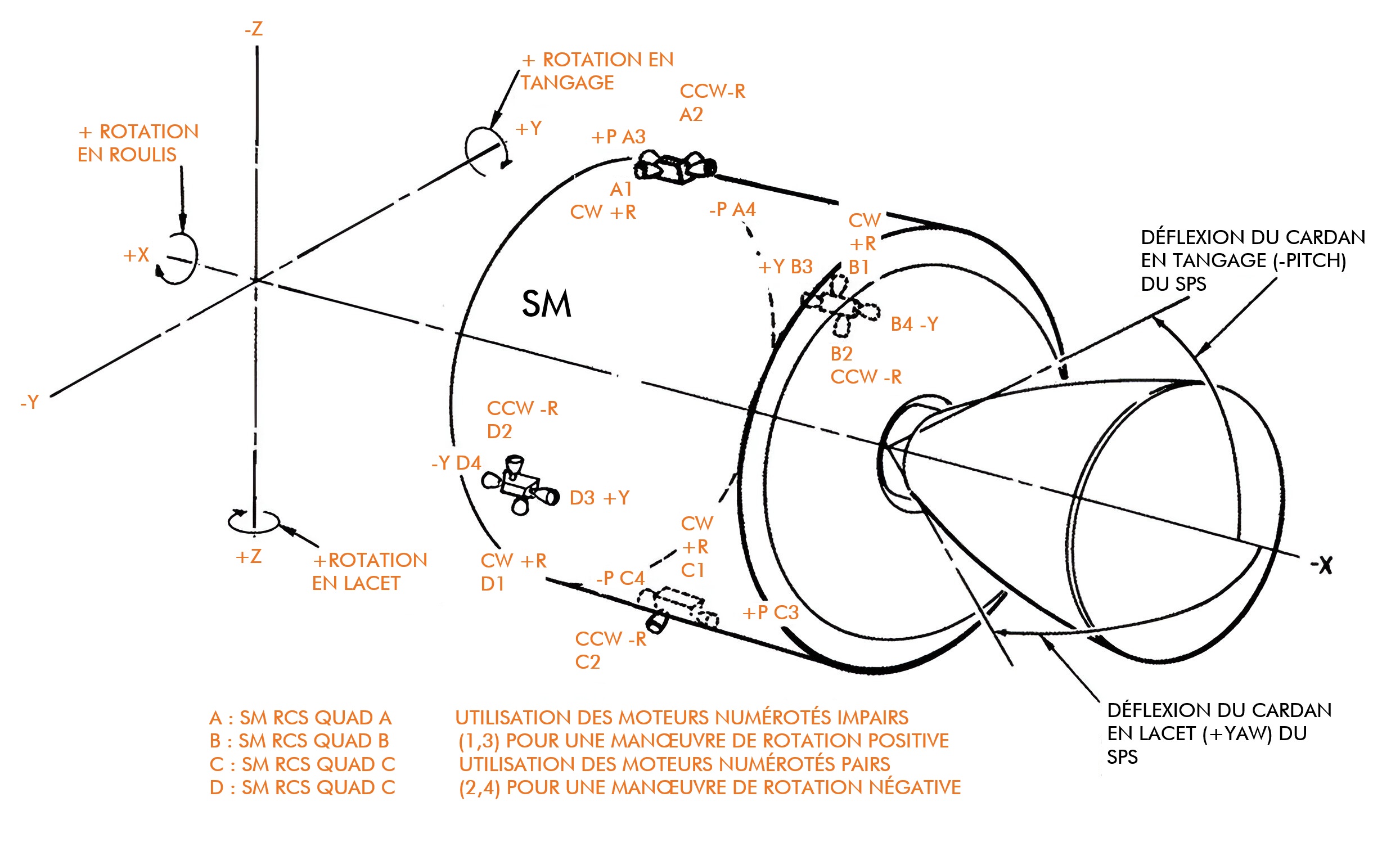
Les moteurs peuvent être alimentés par impulsions, produisant de brèves poussées, ou en continu, générant une poussée stable. L'alimentation par impulsions brèves permet des modes d'opération de maintien d'attitude et des manœuvres d'alignement d'attitude particulièrement précis lors des relevés de navigation. Le contrôle d'attitude du CSM est normalement assuré par l'utilisation des moteurs de tangage, de lacet et de roulis des quatre quads. Toutefois, en cas de défaillance ou pour économiser le propergol, un contrôle d'attitude complet peut être maintenu au moyen de deux quads adjacents seulement.
Le système est utilisé pour contrôler les taux de rotation autour des trois axes, permettant la maîtrise de l’attitude du vaisseau spatial durant l'orbite terrestre, un abandon de trajectoire translunaire, la transposition et l'amarrage, l'orbite lunaire, et le vol de retour (transterrestre). Il peut également être utilisé pour des corrections mineures en cours (correction mi-trajectoire) au cours des vols translunaire et transterrestre. Le système fournit aussi de faibles changements de vitesse lors des manœuvres de tassement nécessaires au bon allumage du SPS. Seule la commande selon l’axe longitudinal (roulis) est assurée pendant la poussée du SPS. En outre, le système fournit les changements de vitesse nécessaires à la séparation du vaisseau spatial du troisième étage (S-IVB) en cas d’abandon à haute altitude ou d’abandon en phase d’injection translunaire, à la séparation de la tour de sauvetage après l’injection du vaisseau Apollo sur sa trajectoire translunaire, au rendez-vous avec le LM en orbite lunaire, ainsi qu’à la séparation du module de commande et du module de service.
Ci-dessous, 1 photo et une vue éclatée.
 |
 |
Le système de pressurisation
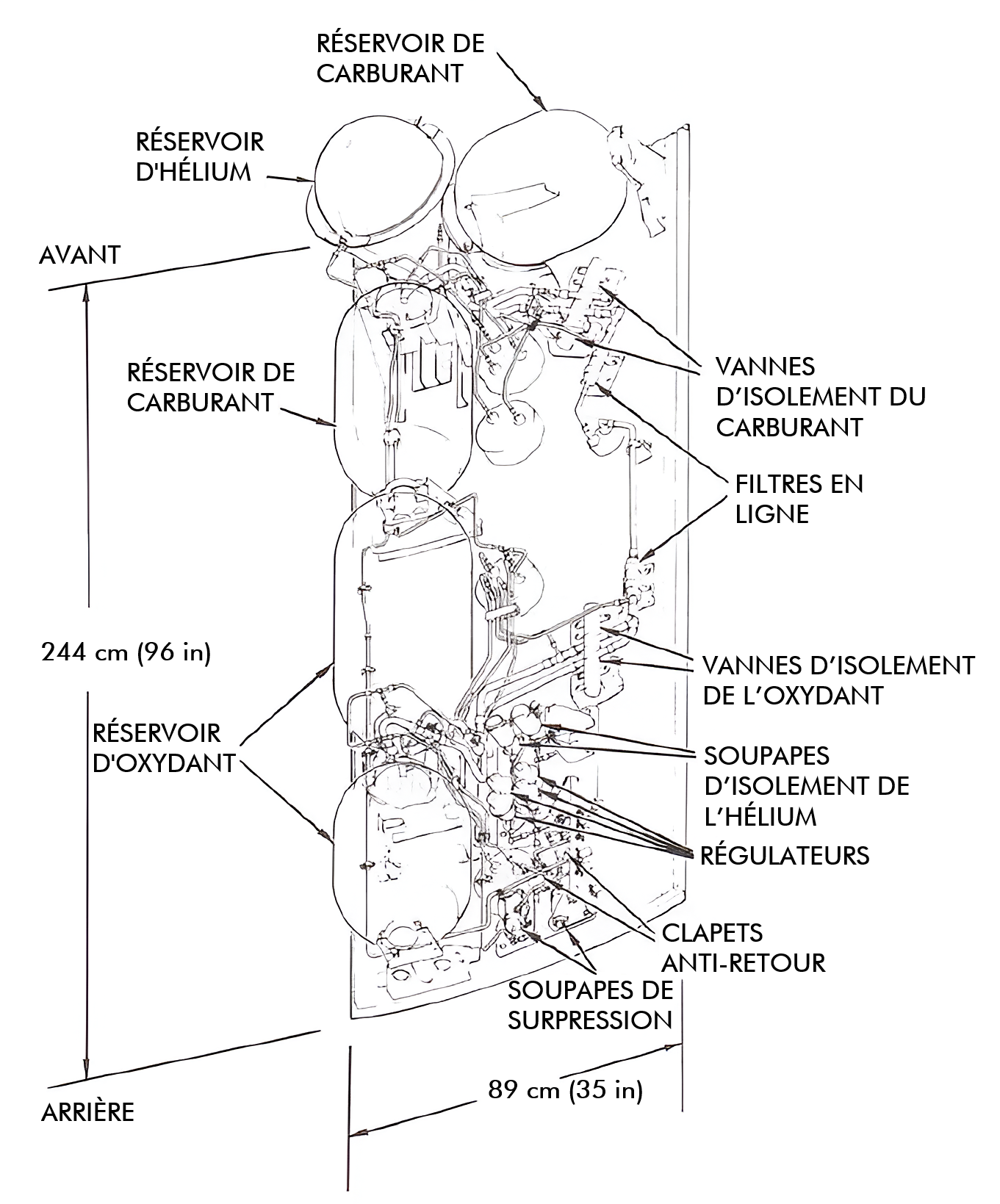
Le système RCS du SM se compose de quatre quads individuels. Chacun dispose de son propre circuit de pressurisation utilisant de l'hélium comme agent de transfert, de ses réservoirs d'ergols, de ses moteurs-fusées et de ses réchauffeurs électriques thermostatiques assurant la régulation thermique. Le système de pressurisation conditionne et distribue l'hélium vers les réservoirs d'ergols. Il comprend un réservoir sphérique en alliage de titane (alliage 6A1-4V), des vannes d’isolement, des régulateurs de pression, des clapets anti-retour, et les conduites nécessaires pour le remplissage, la vidange et la distribution du gaz.
L'hélium s'écoule depuis le réservoir de stockage vers les vannes d'isolement, qui sont des électrovannes à deux voies, maintenues ouvertes par verrouillage magnétique et fermées par ressort. Chaque vanne d'isolement comporte un interrupteur de position permettant d’informer les membres d’équipage de l’état de la vanne. L'hélium, sous haute pression, est ensuite régulé à la pression de service requise (181 psia) à l’aide de deux unités de régulation parallèles. Chaque unité contient deux régulateurs de pression presque identiques fonctionnant en série. Chacune des deux branches parallèles est capable d’assurer seule le débit d’hélium nécessaire, assurant ainsi une redondance en cas de défaillance d’un régulateur bloqué en position fermée. L’utilisation de régulateurs en série au sein de chaque unité permet d’éviter une surpression en cas de défaillance d’un régulateur bloqué en position ouverte. Les conduites de sortie des régulateurs sont réunies en un point commun, à partir duquel le flux est redistribué : le gaz de pressurisation est alors dirigé vers les réservoirs de carburant et de comburant.
Le carburant et l’oxydant sont pressurisés via un système de régulation commun, qui maintient le rapport oxydant/carburant souhaité. Des clapets anti-retour, montés en série et en parallèle, sont situés entre le point commun des conduites et les réservoirs de carburant et d'oxydant. Ils empêchent le reflux et le mélange potentiel de vapeurs de propergols hypergoliques pouvant pénétrer dans les vessies des réservoirs. Cette disposition en série et en parallèle permet d’éviter qu’une défaillance d’un clapet, qu’il reste bloqué ouvert ou fermé, compromette le système.
Des soupapes de décharge sont installées entre les clapets anti-retour et les réservoirs de propergol afin d'éviter que les réservoirs soient endommagés par des surpressions résultant de la dilatation thermique. La configuration en série des régulateurs permet de prévenir les surpressions provoquées par une fuite d’un régulateur. Rétrospectivement, il aurait été préférable de dimensionner la soupape de décharge pour qu'elle puisse gérer le débit provenant de deux régulateurs en série défaillants ouverts, plutôt que de ne traiter que les surpressions dues à la dilatation thermique ; la seule conséquence aurait été une légère augmentation de taille. La soupape de décharge comprend deux parties. Un diaphragme éclaté assure une étanchéité positive en conditions normales de fonctionnement. En cas de surpression, ce diaphragme se rompt et la pression agit alors sur le clapet de décharge. La pression de rupture du diaphragme est comprise entre 220 et 236 psid. Cette pression est contrôlée par le réglage de la précharge d’une rondelle Belleville sur chaque unité. La pression de rupture du clapet de décharge est située entre 225 et 248 psid, tandis que la pression minimale de réarmement est de 220 psid. Une soupape de mise à l'air libre est placée entre le diaphragme et le clapet de décharge afin d’éviter que le diaphragme perde son efficacité si une petite fuite se produit, provoquant une hausse de pression en aval. Cette soupape de mise à l’air libre se ferme automatiquement lorsque le débit à travers elle génère une pression différentielle de 30 psid.
 |
 Vue en éclatée du système d'un quad RCS |
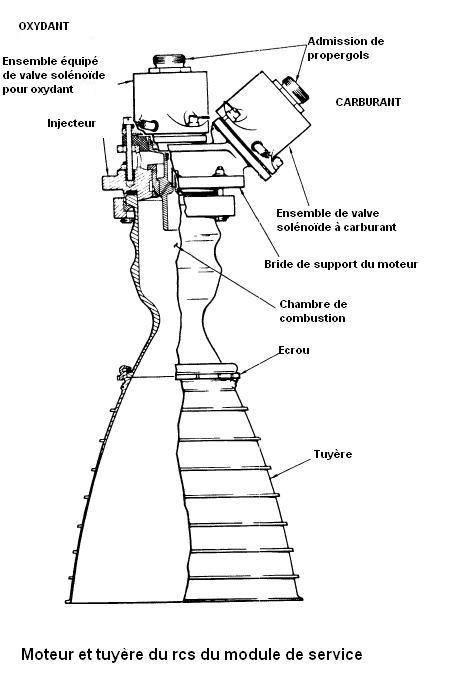 Vue en coupe d'un moteur R-4D |
Système d'alimentation en ergols
Les systèmes de carburant et d'oxydant sont identiques. Chaque réservoir comprend une coque extérieure en alliage de titane, une vessie en Téflon et une colonne montante en aluminium. La pression d'hélium est injectée dans le réservoir entre la coque métallique et la vessie, comprimant cette dernière et expulsant le propergol contenu dans la vessie via la colonne montante. Cet agencement assure une expulsion positive du contenu en apesanteur. Un tube d'évent est installé à l'intérieur de la colonne montante pour faciliter l'entretien de tout réservoir vertical. Ce tube permet aussi au gaz piégé dans la vessie de s’échapper lorsqu’il est déplacé par le propergol (carburant ou oxydant). Les réservoirs montés horizontalement doivent être entretenus sous vide.
Initialement, chaque ensemble RCS du SM comportait seulement deux réservoirs d'ergols : un réservoir à carburant et un réservoir d'oxydant. Ces deux réservoirs étaient montés verticalement. Lorsque les besoins en propergols furent précisés, deux réservoirs supplémentaires furent ajoutés. Le vaisseau spatial 101 (Apollo VII, première configuration Block II) fut le premier à être équipé de ces deux réservoirs additionnels, identiques à ceux du module de commande, mais de taille plus réduite par rapport aux deux réservoirs existants du module de service. Le réservoir supplémentaire d’oxydant est monté verticalement, tandis que le réservoir supplémentaire de carburant est installé horizontalement, en raison du manque d’espace. Ce dernier doit être rempli sous vide.
Les orifices de remplissage et de vidange nécessaires à l'entretien des ergols sont situés sur les conduites immédiatement en aval des réservoirs. Une vanne d'isolement à ergol, normalement ouverte, est placée en aval de chaque réservoir. Initialement, les ergols ne sont chargés que jusqu’au niveau des vannes d’isolement fermées. Avant le lancement, ces vannes, qui sont des électrovannes à deux voies à verrouillage magnétique en position ouverte et fermées par un ressort, sont ouvertes. Comme pour les vannes d’isolement de l’hélium, chaque vanne d’isolement à ergol est équipée d’un interrupteur indicateur de position, permettant à l’équipage de connaître la position de la vanne.
Avant la construction du vaisseau spatial 104, le seul moyen de gérer les ergols consistait à ouvrir ou fermer leurs vannes d’isolement. Sur le vaisseau spatial 104, une vanne d'isolement de l'hélium, identique à celles déjà en place, a été ajoutée juste en amont de chaque petit réservoir de carburant secondaire. Cette vanne est normalement fermée et ne doit être ouverte que lorsque le carburant du réservoir principal est épuisé. L’épuisement du carburant est détecté par une chute de pression dans la conduite d’alimentation. Cette méthode permet de vérifier ponctuellement le jaugeage des ergols au moment critique de la commutation. Des filtres en ligne, ajoutés tardivement dans le programme de développement, sont installés dans chaque collecteur d'ergol, en aval des vannes d'isolement et en amont de chaque groupe de moteurs. Ils sont conçus pour empêcher les contaminants présents dans le carburant ou l'oxydant de pénétrer dans les vannes ou les injecteurs des moteurs. La vanne de carburant de chaque moteur s'ouvre environ deux millisecondes avant la vanne de l'oxydant, afin d'assurer un fonctionnement correct du moteur.
Les moteurs
Chaque quad est monté de façon rigide dans un carter à l'extérieur d'un panneau en nid d'abeilles. Ce panneau mesure environ 2,40 m (8 ft) de long et 0,91 m (3 ft) de large. Une fois inséré et boulonné en place, il devient partie intégrante de la structure du module de service (SM). Les 16 moteurs (4 moteurs x 4 quad) sont refroidis par rayonnement. Ce sont les seuls moteurs du vaisseau à ne pas utiliser un refroidissement par ablation, comme celui employé pour le bouclier thermique du module de commande (CM). Les chambres de combustion sont fabriquées à partir de pièces forgées en molybdène usiné, revêtues de disiliciure de molybdène pour éviter l'oxydation du métal à haute température. La conception monobloc des pièces forgées en molybdène permet d’obtenir un rapport d’expansion de la tuyère de 7:1. L’extension de la tuyère, en alliage filé à base de cobalt (acier inoxydable), atteint un rapport de surface de 40:1 et est fixée à la chambre à l’aide d’écrous Waspaloy®. Chaque moteur mesure 34 cm de long, pèse 2,26 kg et fournit une poussée maximale de 445 N (100 lb). Ils utilisent des propergols hypergoliques : du monométhylhydrazine (MMH) comme carburant et du tétroxyde d’azote (N2O4) comme oxydant. L’impulsion minimale dure 12 millisecondes. Chaque moteur est conçu pour un maximum de 10 000 allumages et un total cumulé de 1000 secondes de fonctionnement (près de 17 minutes). Ils sont fabriqués par la Marquardt Corporation, à Van Nuys, en Californie.
Le saviez-vous ? Dans le programme Mercury, il était difficile de remplacer ne serait-ce qu’une seule vanne du système de contrôle d’attitude (RCS). Dans le module de service (SM), l’ensemble du panneau est déposé et remplacé par un panneau de rechange. Le panneau nécessitant le remplacement d’un composant est renvoyé à l’usine pour réparation. Cette approche permet de fabriquer et de contrôler entièrement le système RCS du module de service de manière indépendante des autres sous-systèmes.
Le saviez-vous (2) ? C’est 182 jours avant le lancement que les quads RCS du CSM arrivent au Centre spatial Kennedy. Ils seront installés sur le module de service une fois celui-ci arrivé sur place (exemple pour Apollo 11).
Tassement : action de purge visant à faire légèrement pencher le vaisseau Apollo vers l’arrière par une brève accélération, de manière à comprimer les ergols au fond des réservoirs, éliminant ainsi les bulles et poches de gaz, afin de garantir un écoulement continu vers la chambre de combustion du moteur principal SPS.
Sources : PDF : Apollo Experience Report Command and Service Module Reaction Control System, Apollo Operations Handbook Block II spacecraft Volume I Spacecraft Description.Texte de Paul Cultrera, tous droits réservés.