LE SYSTÈME D'AMARRAGE (Drogue and Probe)
a) localisation compartiment avant
Éléments :
- système d'amarrage (Drogue and Probe).
Fonction : Son rôle est de fournir un moyen de capture, d'amarrage et de désengagement entre le CSM et le LM (Lunar Module pour module lunaire).
Il est utilisé 2 fois au cours de la mission :
- la première, au début du vol trans-lunaire quand le CSM une fois dégagé de l'étage S IVb et retourné, s'arrime au LM, pour extraire celui-ci de son logement (qui se trouve au dessus du réservoir supérieur du S IVb).
- la seconde, lorsque l'étage de remontée du LM revient de l'exploration de la surface lunaire pour effectuer le transfert de l'équipage et des échantillons de roches.
L'amarrage s'obtient par des manœuvres d'approche d'un des véhicules (CSM) qui consiste à se placer assez près et dans l'axe pour que sa sonde puisse s'engager dans le cône récepteur (la "douille") du LM.
Dans le premier amarrage (extraction du LM, en cour du vol trans-lunaire) c'est le CSM qui a le rôle actif (désengagement du S IVb, retournement, alignement des axes pour une parfaite capture) alors qu'au second amarrage les rôles sont inversés.
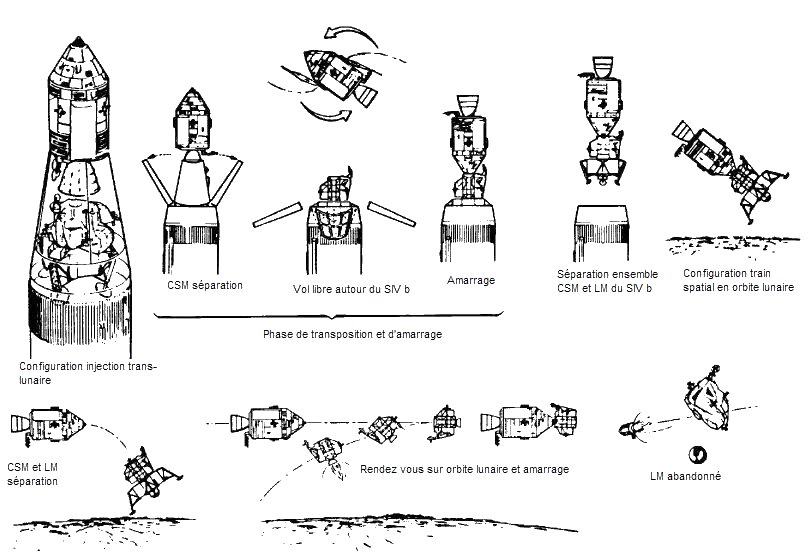 Schéma des phases d'amarrage |
|
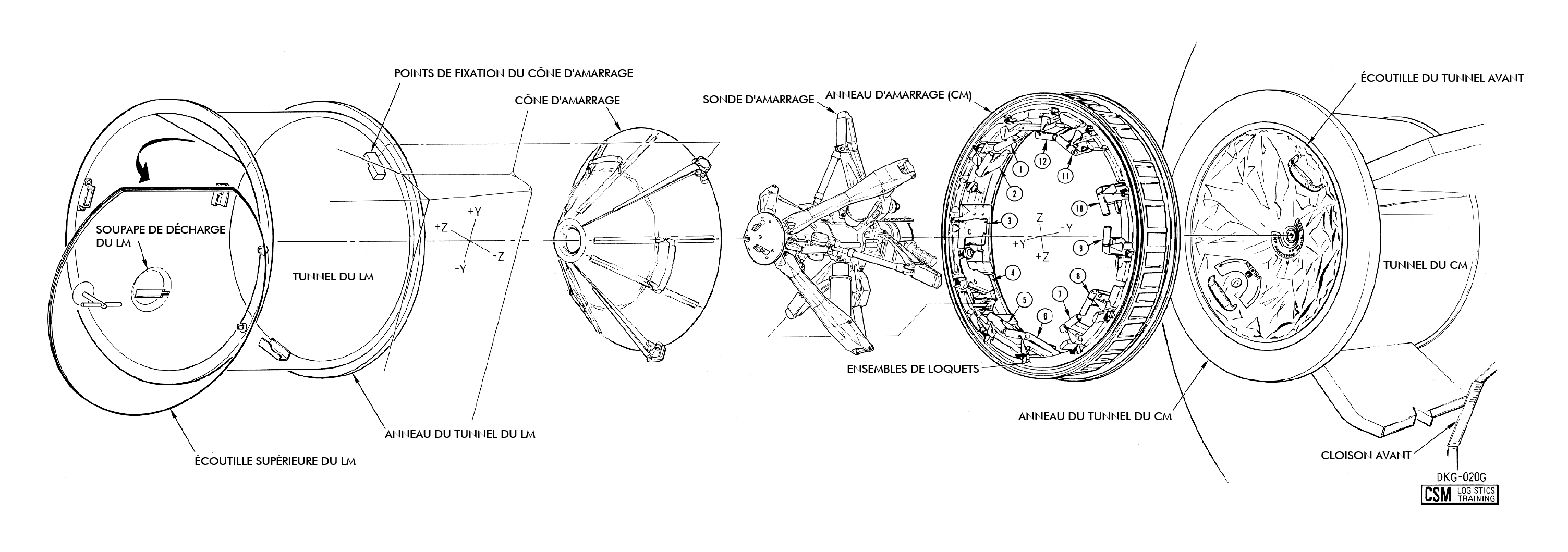
La sonde (CSM), le cône récepteur (LM), l'anneau d'amarrage et son système d'accroche, les attaches de tension sont les principaux accessoires de l'ensemble.
Les véhicules (CSM et LM) possèdent chacun une écoutille et une partie de l’interface d’amarrage formant le tunnel commun. Celles-ci ne sont ouvertes qu’après égalisation des pressions entre le tunnel et les deux vaisseaux.
Avant le vol, le personnel technique au sol place chacun des 12 verrous en position armée (ouverte) par deux mouvements de traction en utilisant leur poignée individuelle. Cette opération fait tourner l'arbre central, comprime les ressorts hélicoïdaux et arme le déclencheur.
Les manœuvres de transposition et d’amarrage sont effectuées par le CMP (toutefois, à titre de secours, le CDR et le LMP sont également entraînés à exécuter la manœuvre) à l’aide de courtes impulsions du système RCS du CSM (véhicule actif lors du premier amarrage). Le CMP est assisté dans la manœuvre du véhicule par un système d’alignement et de visée (Crewman Alignment Sight), dispositif optique monté de façon fixe sur le cadre de la fenêtre de rendez-vous, permettant un alignement dans l’axe de la cible installée sur le toit du LM, ainsi que par un radar de rendez-vous.
 le Crew Alignment Sight |
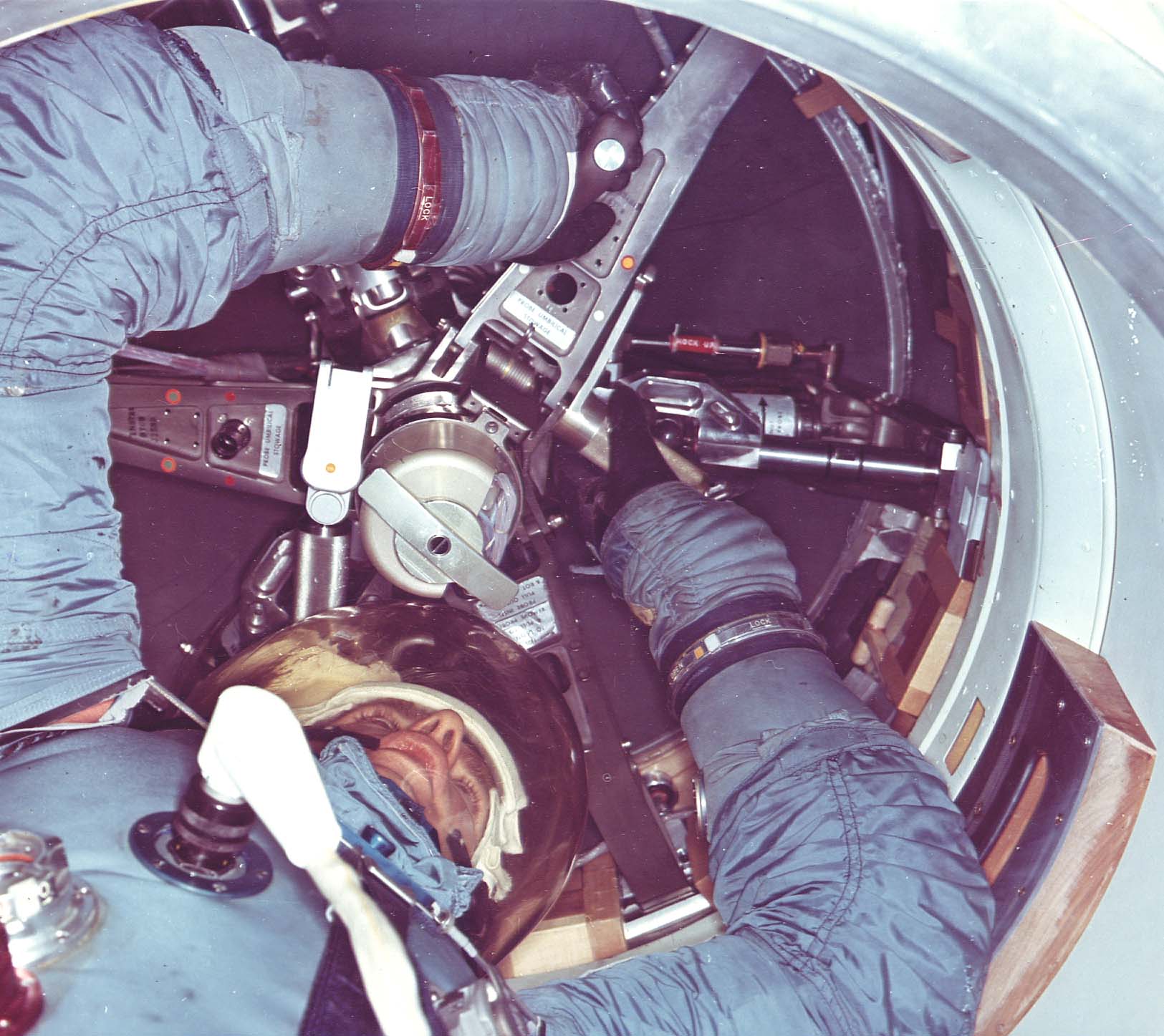
Avant que les manœuvres d’amarrage ne commencent, un membre d’équipage active un interrupteur qui commande l’extension de la sonde.
Le bouton « CSM/LV Sep » situé sur le panneau de commande est enfoncé, déclenchant un cordon détonant qui sépare le CSM de l’adaptateur du vaisseau spatial et du module lunaire (SLA), ainsi que les quatre panneaux de l’adaptateur les uns des autres et du dernier étage S-IVB. Cette opération met le LM à découvert.
Les propulseurs de translation du CSM sont alors utilisés pour l’éloigner à une distance de sécurité. Les propulseurs de rotation servent ensuite à faire cabrer le CSM de 180° et à le faire rouler jusqu’à atteindre l’angle d’alignement correct pour l’amarrage. Les propulseurs de translation sont de nouveau utilisés pour le rapprocher du LM.
Lorsque la sonde entre en contact avec le cône récepteur fixé dans le tunnel du LM, elle est guidée jusqu’à une cavité (la douille) située au fond et au centre de ce dernier. La tête de la sonde dépasse alors de cet orifice, et les trois loquets de capture montés sur son sommet s’engagent sur sa périphérie pour maintenir le CM et le LM ensemble. Cela constitue l’amarrage souple (soft docking).
Un membre d’équipage contrôle un indicateur pour confirmer l’engagement, puis active le mécanisme de rétraction de la sonde, un système de pressurisation à l’azote intégré à celle-ci. Ce mécanisme rapproche automatiquement l’anneau d’amarrage du CM et le tunnel du LM.
Les verrous sont automatiquement activés par le mouvement de fermeture des modules CM et LM. L’anneau d’amarrage du LM appuie sur les déclencheurs des verrous, ce qui libère les crochets et poignées, leur permettant de pivoter jusqu’à une position où chaque crochet se place au-dessus de la lèvre de l’anneau d’amarrage du LM.
À ce stade, le crochet actionne une liaison qui soulève le cliquet d’entraînement et le levier de déclenchement hors des crans de l’arbre central, permettant à la force du ressort de bungee de faire tourner l’arbre et de tirer le crochet contre la lèvre de l’anneau d’amarrage du LM. De plus, pour empêcher la rotation inverse de l’arbre, deux cliquets anti-retour s’engagent sur celui-ci. L’assemblage d’échappement permet d’armer le verrou et de le déclencher manuellement lorsque le CM et le LM sont en configuration amarrée, tout en assurant une réinitialisation automatique du déclencheur lors du désamarrage du CM et du LM. Pour les opérations normales de la mission, le seul effort manuel requis de l’équipage est d’armer chacun des 12 verrous pour l’unique événement de désamarrage en orbite lunaire. L’engagement de ces crochets assure une connexion étanche et structurellement rigide (hard docking), formant ainsi un tunnel pressurisé entre le CM et le LM.
Enfin, un membre d’équipage égalise la pression du tunnel à l’aide de la vanne située sur l’écoutille d’amarrage du CM, puis retire celle-ci.
Après le retrait de l'écoutille, son 1er "boulot" est de contrôler les crochets d'amarrage pour être sûr qu'ils soient tous engagés correctement (il faut savoir que seulement 3 sur les 12 crochets assurent une prise assez forte pour maintenir une pression constante dans le tunnel entre les deux véhicules) et au cas où, engager manuellement ceux qui ne le seraient pas. Il connecte ensuite les 2 cordons ombilicaux servant à l'alimentation électrique de secours du LM, vérifie que les 3 pênes (loquets) de capture soient bien engagés et ventile le gaz du système de rétractation de la sonde.
Plus tard, la sonde et le cône récepteur seront enlevés et stockés avec l'écoutille du CM sur la cloison arrière sous les couchettes d'équipage (avant la descente sur le sol lunaire).
La pression du LM est égalisée à l'aide de la valve d'égalisation montée sur son écoutille. Par la suite l'écoutille peut être ouverte (celle-ci est solidaire de la structure du LM, alors que celle du CM est démontable).
Au premier amarrage, la sonde et le cône récepteur ne sont pas enlevés. Un membre d'équipage ouvre juste l'écoutille pour faire les vérifications standards et les connections des cordons ombilicaux, puis la referme.
La descente
En orbite lunaire, le tunnel d’amarrage entre le module de commande (CM) et le module lunaire (LM) est ouvert. L'écoutille du CM, la sonde et le cône récepteur sont retirés et stockés. Deux astronautes, le commandant (CDR) et le pilote du LM (LMP), passent dans le LM pour préparer la descente lunaire. Le pilote du CM passe le cône récepteur à un membre d’équipage du LM pour qu’il soit réinstallé dans le tunnel.
Une fois le cône récepteur en place et l’écoutille du LM fermée, le pilote du CM réinstalle la sonde, déconnecte et range les deux cordons ombilicaux d’alimentation électrique dans un compartiment dédié du tunnel, réarme manuellement les douze loquets de l’anneau d’amarrage, puis ferme et scelle l’écoutille du CM. La force de séparation, générée par la pression interne dans la zone du tunnel, est transmise des loquets annulaires à la sonde et au cône récepteur. Pour équilibrer cette charge et garantir l’étanchéité de l’interface, la sonde et le cône récepteur doivent être préchargés par le mécanisme des verrous de capture et du cône récepteur.
Cette précharge est appliquée à l’aide d’un arbre de couple actionné manuellement, fixé sur le côté du cylindre d’amarrage. Cet arbre est équipé d’une poignée unique et d’un mécanisme d’embrayage à limitation de couple, cannelé à l’arbre.
À l’extrémité de l’arbre de couple, côté crochet étendu, une vis à filetage ACME (vis à filetage trapézoïdal) permet le déplacement du crochet lorsque le couple est appliqué. Le limiteur d’embrayage est préréglé pour se désengager à un couple correspondant à une tension nominale de 2,72 tonnes (environ 26 670 newtons) au niveau du crochet.
La séparation des deux véhicules pour la descente lunaire est effectuée après réduction de la pression du tunnel à un niveau minimal, proche du vide, et libération électrique des trois verrous de capture depuis l’ensemble du cône récepteur. Cette libération, lors du désamarrage, est réalisée par des moteurs à courant continu montés en tandem dans le piston central, qui entraînent leur retrait.
La remontée
Lors du second amarrage, le LM joue le rôle du véhicule actif, bien que les opérations restent similaires.
Le pilote du CM retire l'écoutille de son module, vérifie les crochets, démonte la sonde et reconnecte les cordons ombilicaux.
De son côté, le pilote du LM ouvre l'écoutille de son module et retire le cône récepteur pour libérer le tunnel, permettant ainsi le transfert de l'équipage et des échantillons de roches lunaires.
Une fois ces opérations terminées, la sonde et le cône récepteur, devenus inutiles, sont rangés dans le LM. Les deux écoutilles sont ensuite repositionnées et scellées, tandis que la pression dans le tunnel est réduite. Les deux modules sont alors prêts pour la séparation définitive.
Cette séparation est réalisée grâce à l'activation d'un cordon pyrotechnique situé autour de l'anneau d'amarrage. Cela détache l'anneau du CM, qui reste fixé au LM. L'ensemble demeure en orbite lunaire pendant un certain temps avant de s'écraser sur la Lune.