FICHE D'INDENTITÉ DU CRAWLER
![]()
Nom : Crawler Transporter (ou CT).
Fonction : transporteur (tracteur géant et son plateau) à chenilles.
Donneur d'ordres : NASA (National Aeronautics and Space Administration).
Constructeur : Marion Power Shovel Co. of Ohio.
Nationalité : Américaine.
Taille :
• Longueur : 39,92 m ;
• Largeur : 34.74 m ;
• Hauteur : 10,97 m.
Masse : 2721 t.
Puissance :
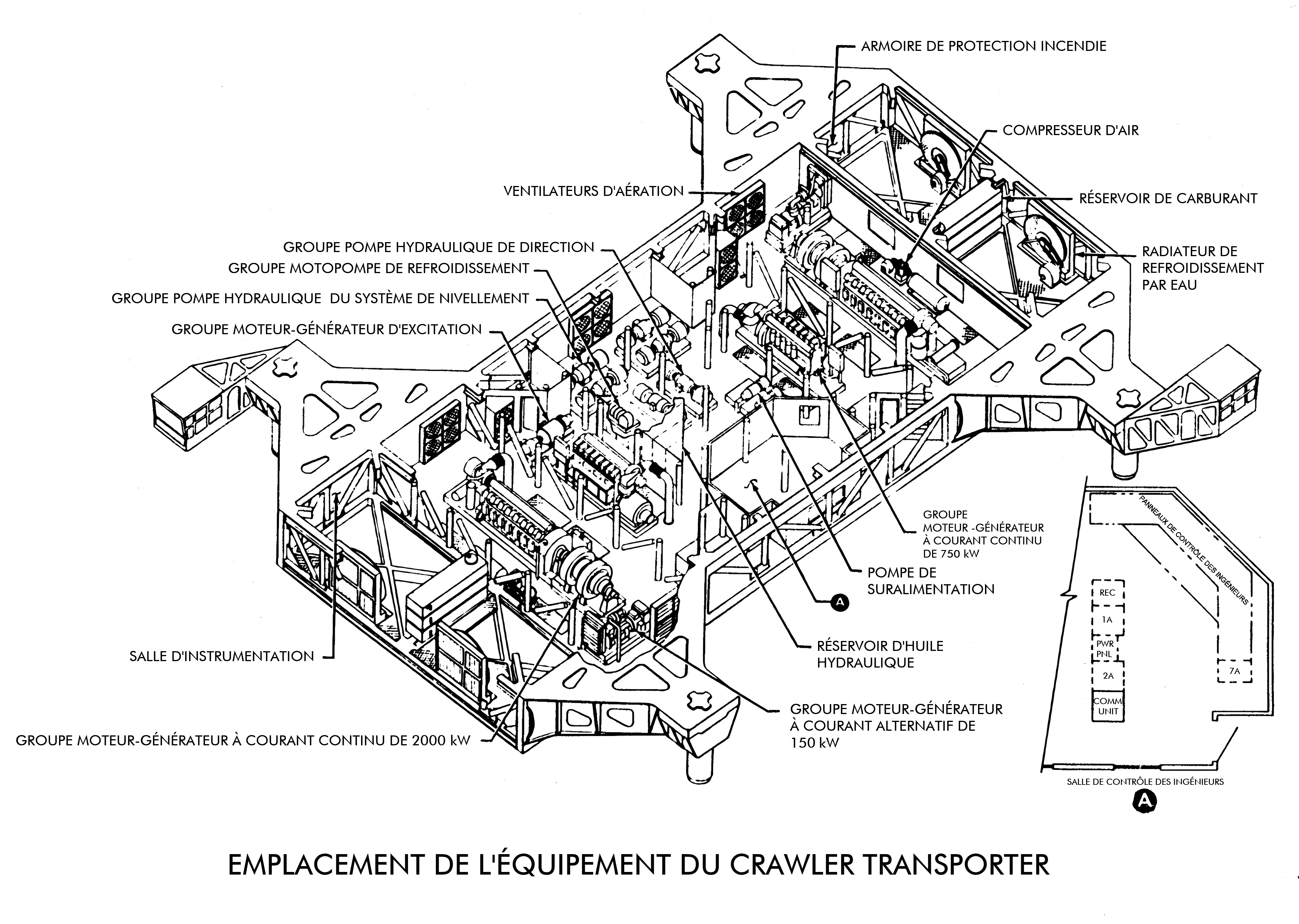
• L'énergie électrique alimentant les 16 moteurs de traction (4 pour chaque bogies de 375 ch chacun) est produite par quatre générateurs de 1000 kW entraînés par deux moteurs diesel Alco (16 cylindres) de 2 750 ch (2 050 kW) chacun. La puissance électrique pour le contrôle de la posture, de la direction, de la ventilation et de l'éclairage est fournie par deux autres générateurs de 750 kW alimentés par deux plus petits moteurs diesels de 1065 ch (794 kW) chacun. Utilisant cette puissance, 4 pompes hydrauliques assurent la commande de direction, et 8 autres pompes hydrauliques le JEL system (Jacking, Equalizing, Leveling) afin de garder une assiette stable en toutes circonstances.
Vitesse :
• Vitesse maximum de 1,6 km/h chargé, et 3,2 km/h à vide.
Consommation :
476 litres de gazole par mile (1,609 km) soit 3 l chaque 12 m... L'OPEP (l'Organisation des Pays Exportateurs de Pétrole) sourit chaque fois qu'on le démarre.
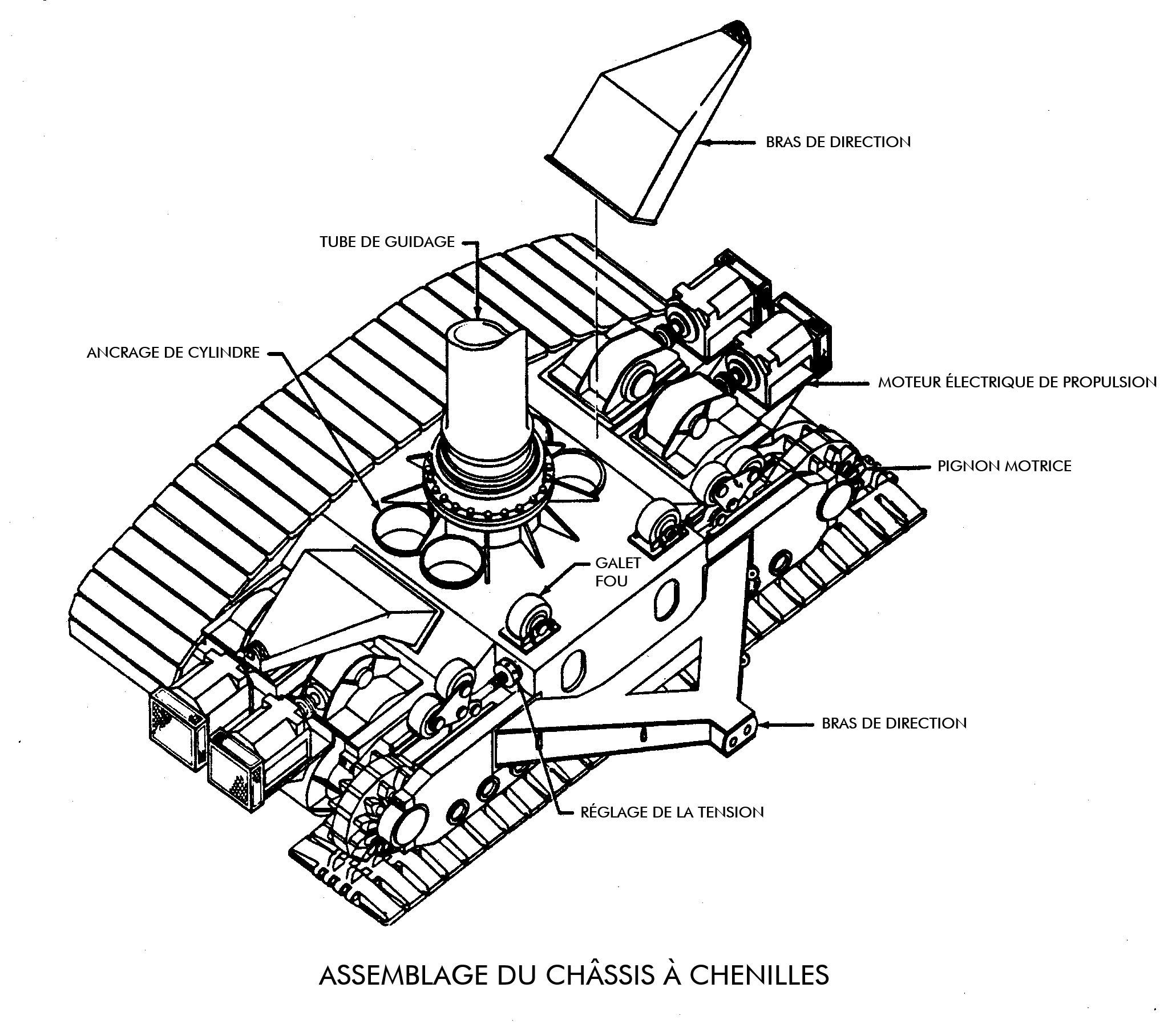
Traction au sol : les unités motrices (boggie) sont similaires à celles d’un bulldozer et sont orientables individuellement. Chacune possède deux larges trains de chenilles, composés chacun d’une série de 57 patins (aussi appelés segments) reliés entre eux. La longueur totale d’une chenille individuelle dépasse 36,5 m (120 ft). Avec un total de huit chenilles pour les quatre unités motrices, chaque Crawler-transporter utilise en tout 456 patins. Chaque patin de chenille mesure environ 2,29 m de long (90 in), 0,64 m de large (25 in) et pèse environ 950 kg (2 100 lb). Les patins sont fabriqués en acier pour garantir robustesse et durabilité. La partie centrale de chaque patin possède une structure caisson creuse afin d’alléger la masse sans perte de résistance ni de rigidité.
Le dessus de chaque patin comporte deux ergots centraux servant de guides pour les galets du module chenillé. Chaque côté du patin est équipé de plusieurs ergots d’articulation permettant de le relier aux patins adjacents afin de former la chenille complète. Les ergots de guidage centraux et les ergots d’articulation sont des éléments intégrés à la conception et jouent un rôle essentiel pour la solidité et la durabilité. Les ailes extérieures du patin sont effilées. L’épaisseur maximale des parois de la pièce moulée est de 16,5 cm (6,5 in), et la section la plus fine des parois est de 2,5 cm (1 in).
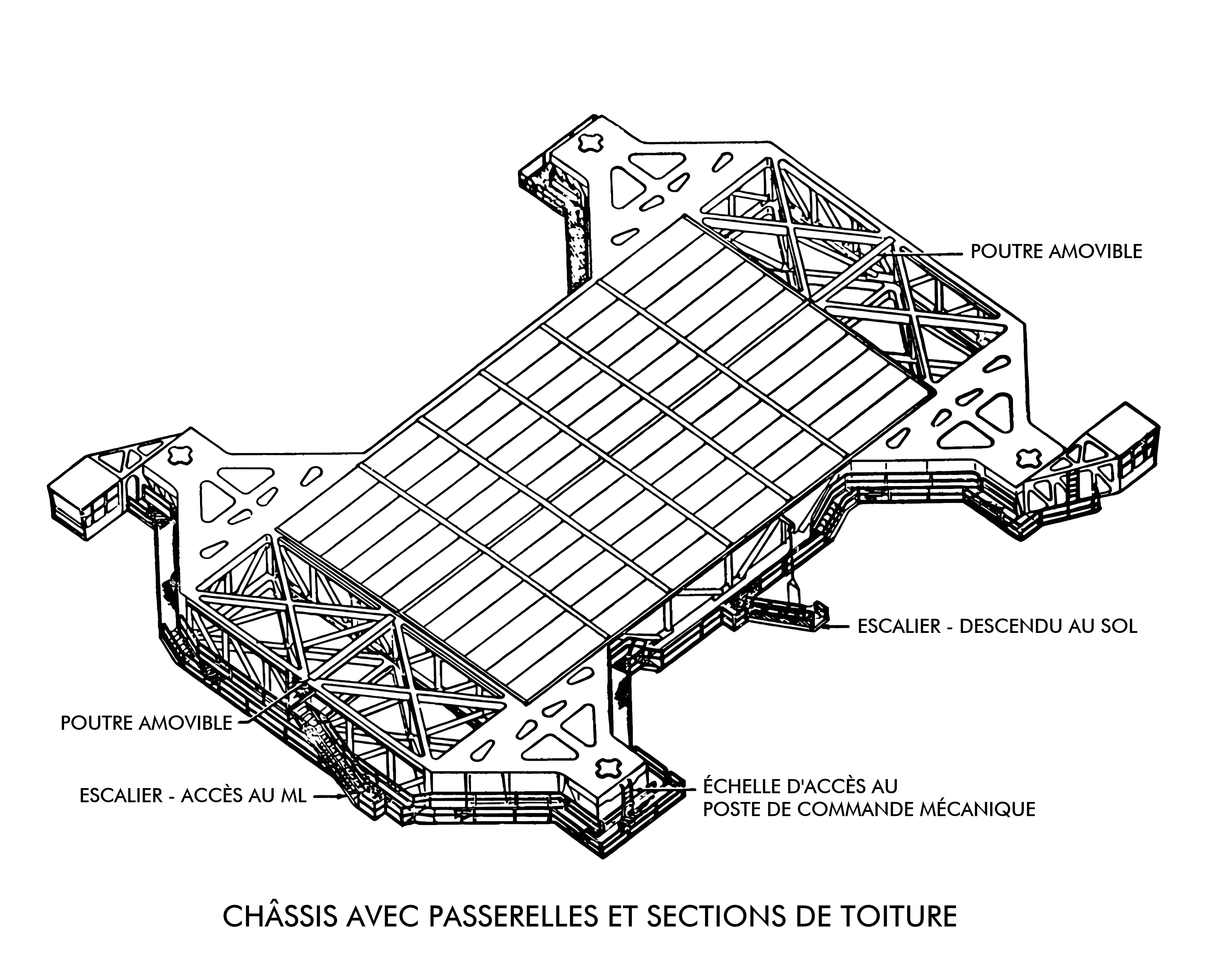
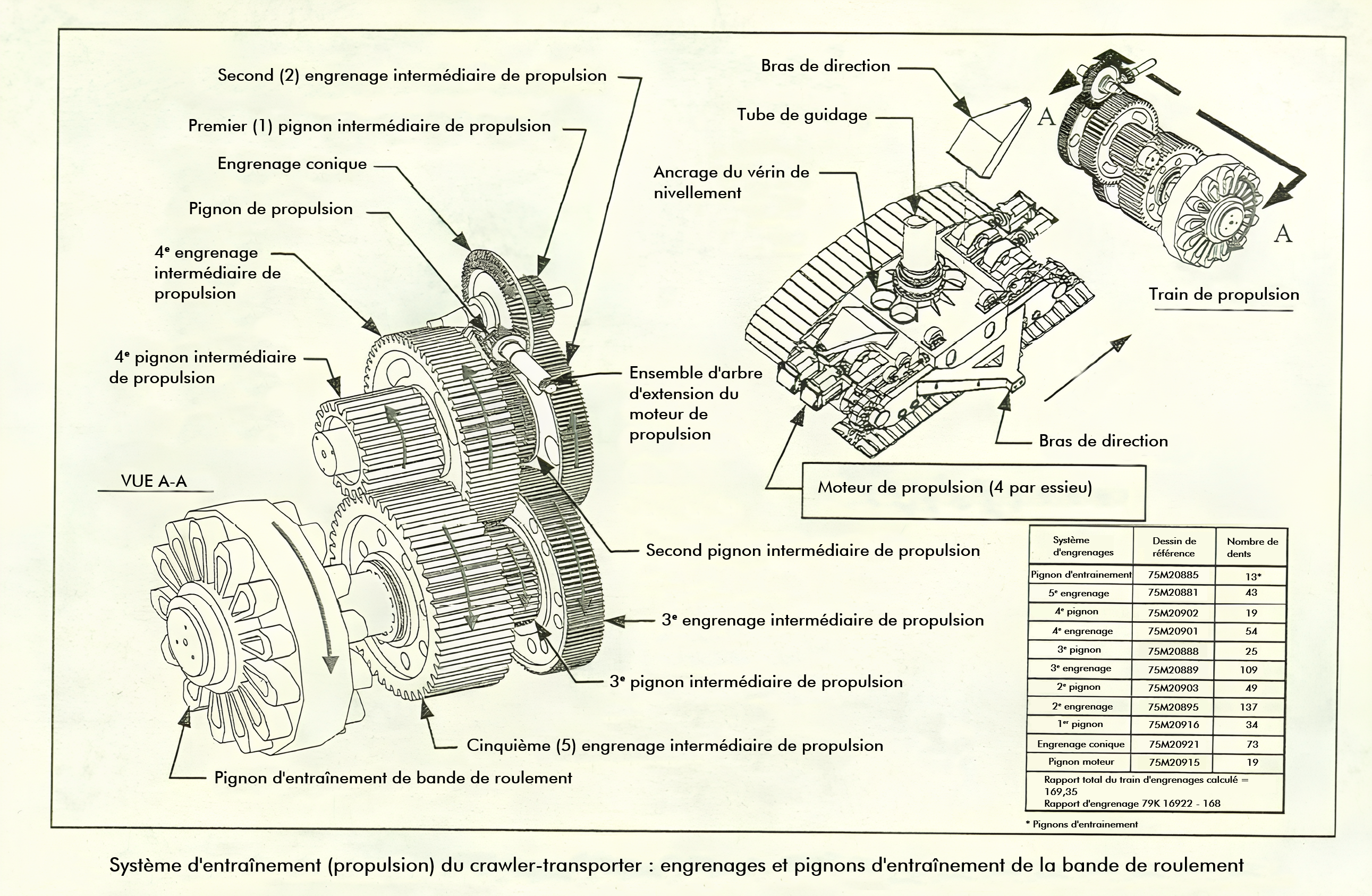 Système d'entrainement des chenilles |
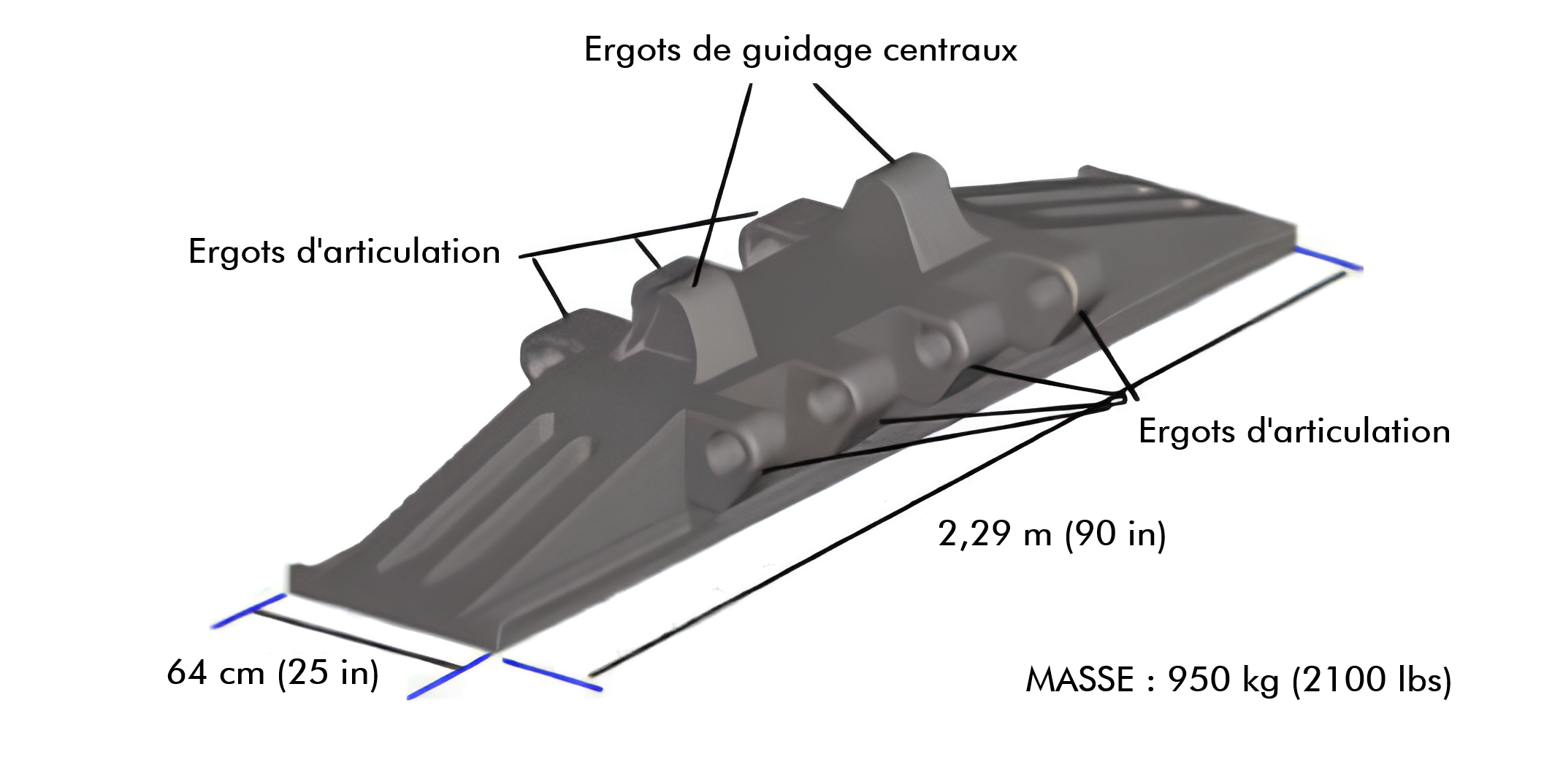 Vue d'ensemble d'un patin de chenille |
Prix : environ 14 000 000 $.
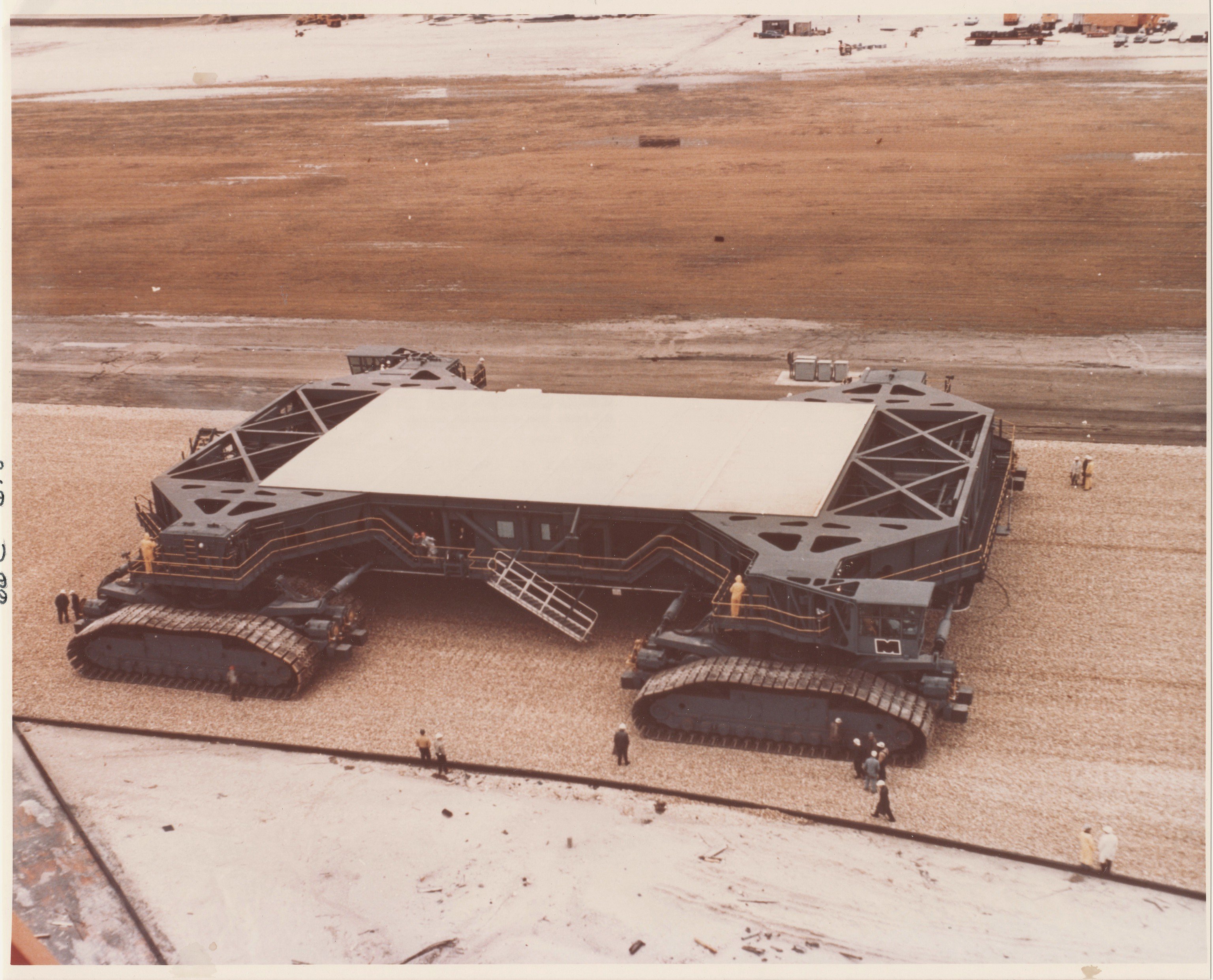
 Vue d'ensemble du Crawler |
 Vue rapprochée du Crawler |
Pour finir, le Crawler possède deux cabines de pilotage (disposées en quinquonce) contenant les commandes habituelles trouvées dans une automobile : accélérateur, frein à pied et de stationnement, tachymètre (compteur de vitesse), climatiseur, siège réglable, radio pour les communications (entrées, sorties). Elles sont aussi équipées des plus gros essuie-glaces du monde (1,07 m pour les balais).
Le CT possède dans ses entrailles une salle de contrôle qui accueille 3 à 4 ingénieurs, lesquels sont chargés de surveiller tout ses mouvements et ses paramètres (température du moteur, température de l'eau, la direction, le système de cric). De là les ingénieurs peuvent soulever 6000 t en actionnant "simplement" un bouton sur la console, personne ne monte dans le véhicule avant que tout ne soit prêt à ce niveau.
 |
 |
 |
 |
En outre, le Crawler transporte deux générateurs supplémentaires de 150 kilowatts pour alimenter électriquement (durant le trajet VAB / aire de lancement) le lanceur Saturn V et le Mobile Launcher (ML pour tour de lancement mobile). La capacité de ses réservoirs de carburant est de 18 927 litres (5000 US gal).
Lors de la montée de la rampe d'accès (5° de pente) du socle de lancement, la mise à niveau de la plateforme ce fait grâce au système JEL, un système de cric basé sur des verrins hydrauliques, quatre à chaque angles (au dessus des boggies), ce qui permet de garder l'ensemble lanceur et ML toujours à la verticale.
 Vue d'une des deux cabines de pilotage |
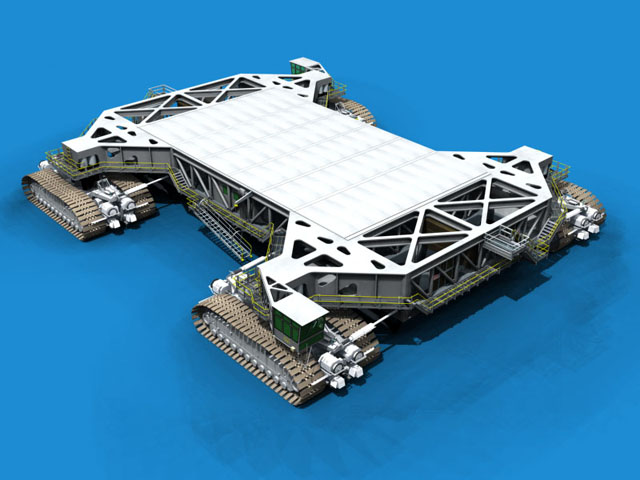 Vue d'ensemble (en 3D) du Crawler |
 Photo de la bête |
Le JEL system (Jacking, Equalizing, Leveling) plus en détail
Le nivellement conventionnel des grandes pelles à câbles (machines minières) était réalisé en ajustant la hauteur relative des coins situés en diagonale, en détectant les variations de hauteur soit à l’aide d’interrupteurs à niveau à mercure rudimentaires, soit au moyen de grands pendules lourds servant à détecter les variations d’assiette. Ces mécanismes étaient montés au centre sur des structures rigides. Ils ont été jugés inadaptés pour une structure indépendante et flexible, en raison d’exigences de nivellement plus strictes et des risques de déformation du châssis. Un système de nivellement de type manomètre, s’étendant entre les coins opposés en diagonale, a été proposé, et une maquette expérimentale à l’échelle 1 d’une longueur de 39,6 mètres (130 fr) a été réalisée pour déterminer les caractéristiques dynamiques des forces d’accélération inhérentes à un tel système. Des analyses théoriques, confirmées par des essais, ont démontré qu’un système de manomètre fermé équipé de transducteurs de pression différentielle constituait un capteur d’assiette fiable pour les applications du Crawler-Transporter.
Fort de ces résultats, le système de nivellement du Crawler-transporter (CT) a été conçu selon ces principes.
Le nivellement du Crawler-transporter est assuré par deux servo-systèmes hydrauliques indépendants mais identiques. Deux manomètres, situés juste sous le pont et constitués de tubes horizontaux d'environ 41 m (135 ft) remplis de mercure, se croisent en diagonale au centre pour former un X ; ce dispositif détecte et contrôle l’assiette. Des transducteurs détectent les écarts d’assiette et transmettent des signaux à un servo-système qui actionne quatre pompes à débit variable, deux pour chaque axe diagonal. Ces pompes alimentent quatre vérins hydrauliques situés à chaque coin du CT, afin de soutenir la charge et de la maintenir en position horizontale. Des systèmes de stabilisation sont nécessaires pour compenser les variations du niveau de la chaussée, le vent et la masse de la charge transportée.
Les premiers essais effectués en 1965 ont révélé une surréaction et une instabilité du système de servo-hydraulique. Une étude de stabilité et une analyse informatique ont montré que les critères initiaux de la boucle de pression n’avaient pas pris en compte : (1) les variations des constantes de compressibilité de l’huile dues à l’extension des vérins, et (2) les différences de constante de raideur provoquées par les changements de masse entre les configurations en charge et à vide. Le problème a été corrigé par l’ajout de deux manomètres supplémentaires installés aux coins avant et arrière, perpendiculairement à la direction de déplacement. Lors des déplacements à vide, seul le système de manomètres est utilisé pour le nivellement et le contrôle d’égalisation. Lors des déplacements en charge, des transducteurs de pression hydraulique placés à chaque coin sont utilisés pour contrôler l’égalisation de la plateforme. Avec le Mobile Launcher à bord, le système d’égalisation à manomètres n’assure plus qu’un rôle d’alerte en cas de dépassement des limites et de coupure automatique. Le nivellement est assuré en permanence par le mécanisme à manomètres à mercure.
Les Crawler-transporters sont conçus avec huit chenilles, deux dans chaque sous-châssis, et des dimensions de 40 m de longueur et 35 m de largeur. La capacité de charge maximale est spécifiée à mL = 6 000 tonnes, à gérer par le système hydraulique de levage, de nivellement et d'égalisation (Jacking, Equalizing, Leveling, ou JEL). Ce système est composé de seize vérins à simple effet, dont quatre dans chaque sous-châssis. Grâce à celui-ci, le crawler-transporter peut soulever la plateforme de lancement entièrement équipée de son emplacement dans le VAB, la niveler durant le transport, notamment lors du passage sur les rampes de la plateforme de lancement, et la déposer sur le piédestal de lancement. Pour réaliser ces fonctions, les vérins hydrauliques ont une longueur de course de x = 2 000 mm, ce qui permet également de compenser l'angle de 5° des rampes d'accès de la plateforme de lancement.
Les vérins du système JEL sont équipés de paliers sphériques à chaque extrémité — au niveau de la tête de tige et de la base — afin de permettre la liberté de mouvement requise lors des opérations de braquage et de nivellement. Le contrôle de la charge est assuré par des soupapes de régulation commandées à distance, installées sur chaque vérin. Il est également possible d’isoler hydrauliquement un vérin JEL individuel et de maintenir la charge à l’aide des trois autres vérins pour un fonctionnement en mode dégradé.
L'unité centrale de puissance hydraulique est installée au centre de la structure du cadre de charge et fournit l'énergie hydraulique à l'ensemble des seize vérins du système JEL.
La mise en route
La préparation du Crawler pour sa mission de transport, est bien plus compliqué que de faire un simple tour de clef de contact. L'ingénieur superviseur indique à la salle de contrôle, le "cœur" (centre névralgique) du véhicule, que tout est prêt.
Une équipe de 14 personnes est nécessaire pour le démarrer. Cela prend approximativement 90 minutes à l'équipe d'ingénieurs et de techniciens pour mettre en marche et faire chauffer les six moteurs diesel, activer plusieurs douzaines de circuits électriques, démarrer les trois circuits hydrauliques, le système pneumatique, le système d'alimentation en carburant et les deux systèmes de lubrification, et faire une série de vérifications inscrites sur le manuel de 39 pages "procédure de démarrage".
Fabrication des différents éléments du Crawler transporter |
Ci-dessus, la bête au travail.. impressionnant! |
Pour être piloté le Crawler nécessite trois conducteurs, un conducteur principal et un de réserve dans la cabine faisant face au sens de la marche, ainsi qu'un autre dans la cabine arrière. Il requiert aussi l'aide d'un opérateur JEL (Jacking, Equalizing, Leveling), d'un opérateur général qui s'occupe de tous les autres systèmes et des communications avec le LCC (Launch Control Center pour centre de lancement), de deux électriciens, de deux électroniciens qui surveillent l'électronique dans la salle de contrôle, ainsi que de quatre mécaniciens en charge des moteurs diesel. Les autres membres de l'équipe anticipent et sécurisent l'avancé du CT jusqu'à destination, en faisant le parcours du VAB au pad de lancement à pied, équipés de talkie walkie pour signaler le moindre problème.
Comparaisons amusantes...
En premier lieu entre la période d'entretien, la quantité utilisée des fluides d'une voiture (style familiale des années soixante, où l'on mesure l'huile moteur et l'eau de refroidissement en dizaine de litres), et celle du crawler..
..Attention à la facture!
• La maintenance normale d'une voiture familiale de l'époque demande des changements d'huile de lubrification tous les 6200 km (3850 mi) environ (exemple avec la Chevrolet Suburban de 1965). Le Crawler, quand à lui doit changer un tambour de graisse d'environ 181 kg approximativement tous les 22 km, basé sur l'utilisation de 56,69 kg pour chaque voyage d'environ 6,5 km (3,5 miles, un peu plus que la distance du VAB à l'aire de lancement). Là où la voiture familiale emploie environ 17 litres d'eau dans son radiateur (à moins qu'elle ne soit refroidie par air), le Crawler a besoin de 1892 litres d'eau réparti dans ses six radiateurs. Sur le grand radiateur, un moteur d'une puissance de 75 chevaux est utilisé pour pomper de l'eau par les circuits de refroidissement.
• Le nombre de silencieux pour l'échappement : un ou deux silencieux sont suffisants sur la plupart des voitures, mais le CT lui en possède six, le plus grand pesant 1360 kg et mesurant plus de 2,74 m de long.
Bon à savoir : Un bogie (ou boggie) est un chariot situé sous un véhicule ferroviaire, sur lequel sont fixés les essieux (et donc les roues). Il assure essentiellement la liaison entre le matériel roulant (wagon ou voiture) et l'infrastructure (dans notre cas la plate forme du tracteur et le sol de la Crawlerway).
 Boggie du Crawler, (de gauche à droite) : non identifiés, George Clark, Robert Brown, Harry Gruber, non identifié, Scotty, Carl Lewis, Jess Granlee, Casey Garver, Joe Moore, Bob Brees, Doug Blessing, non identifié, et Bill Fulcher (chef d'équipe) |
Un autre angle du vue du boggie (photo non datée) |
C'est le personnel de Bendix (Bendix Launch Support Division) qui est en charge de son exploitation et de sa maintenance. Alors qu'un accélérateur contrôle un simple moteur de voiture d'environ 250 CV, son homologue sur le Crawler en commande 16, d'une capacité de plus de 6000 CV, ce qui est égal à plus de 32 automobiles.
Chronologie de la construction du CT en photos
 Usinage d'un engrenage de même type |
|
 Montage par mécano soudure de la structure |
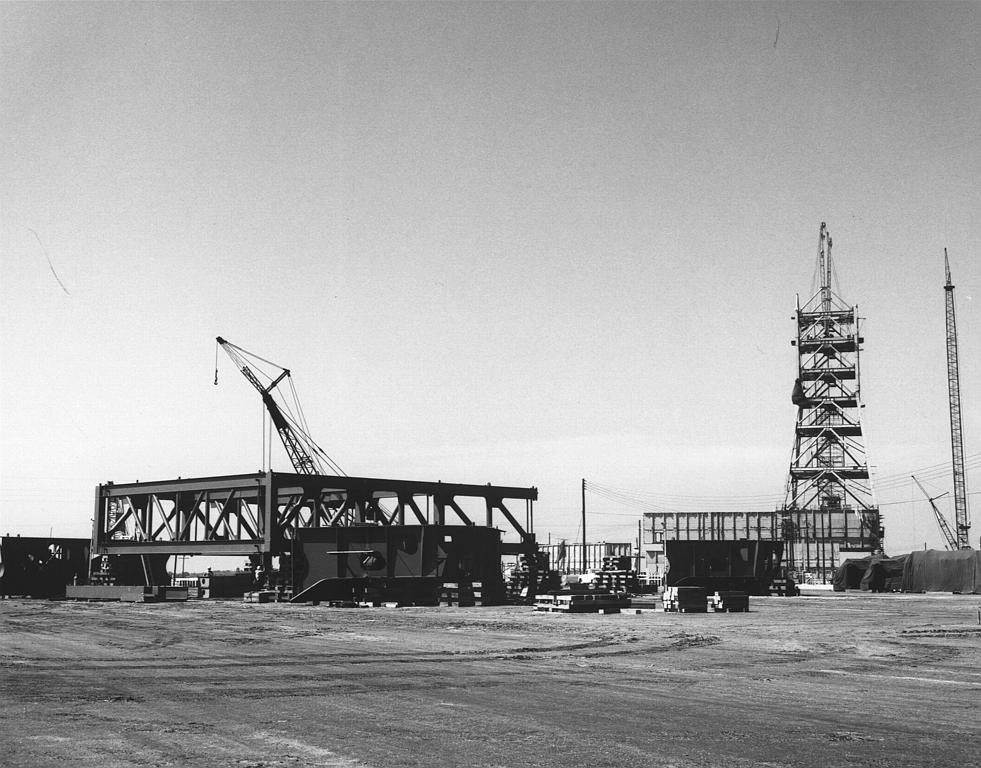 Début du mécano géant le 01/05/1964 |
 Avancement des travaux, photo du 11/05/1964 |
Sur cette photo, les 2 groupes moteur-générateur de 2000 kW, le groupe moteur-générateur de 750 kW ainsi que celui d'excitation sont installés |
Photo datée du 9 novembre 1964, on y voit le plateau quasiment terminé |
 Avril 1965, montage du second Crawler |
 1er Crawler prêt pour le service, janvier 1966 |
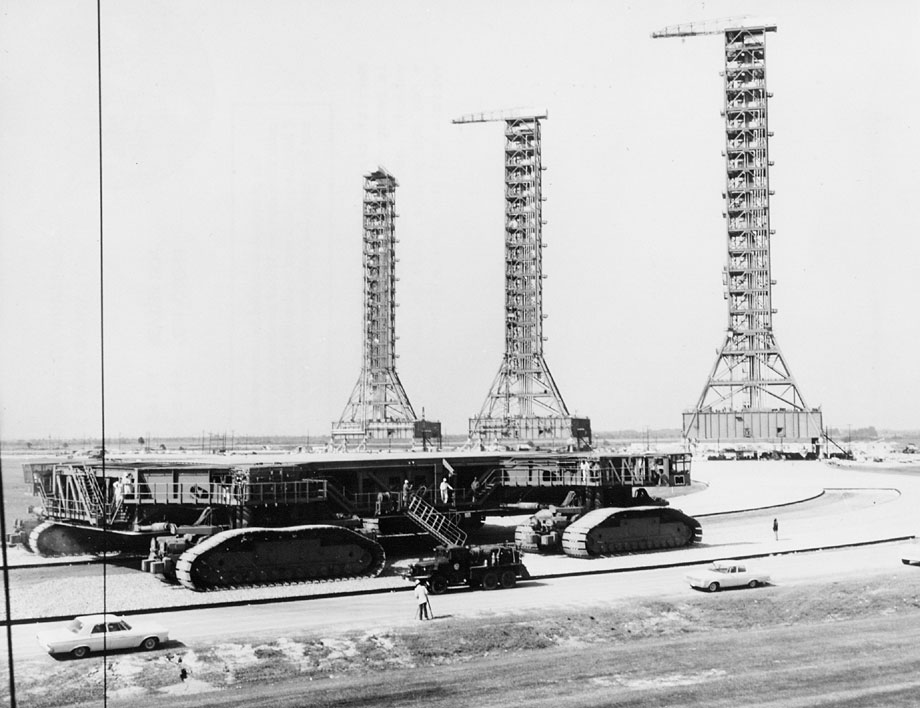 Premier "tour de roue", le 4 mai 1966 |
Anecdotes :
La NASA possède deux Crawlers : un surnommé Hans, l'autre Franz (surnom donnés suite au sketch "Pumping up With Hans & Franz " diffusé dans l'émission Saturday Night Live en 1987).
À l'origine, on avait surnommé les deux Crawlers "Golden Slippers" (les chaussons en or) d'après la chanson "Golden shoes I'am going to wear, to walk that golden street". Effectivement la "Crawlerway" de par son coût sera cette route en or ! (merci à SpaceNut pour l'info).
En 1969, le Crawler obtient le troisième Diamond Jubilee Trophy award à l'occasion du Great Britain Royal Automobile Club's, ce qui le place dans la classe des transporteurs en Antarctique et des hovercrafts.
Sources : "A Design Study in Steel Castings Track Shoe on the NASA Crawler Transporter "PDF. Texte de Paul Cultrera, tous droits réservés.
